钟形振子式角速率陀螺机电耦合特性分析*
2017-08-07刘宁,苏中
刘 宁,苏 中
(1.北京信息科技大学高动态导航技术北京市重点实验室,北京 100101;2.北京理工大学自动化学院,北京 100101)
钟形振子式角速率陀螺机电耦合特性分析*
刘 宁1*,苏 中1,2
(1.北京信息科技大学高动态导航技术北京市重点实验室,北京 100101;2.北京理工大学自动化学院,北京 100101)
钟形振子作为钟形振子式角速率陀螺的核心敏感元件,其机电耦合特性将直接影响钟形振子式角速率陀螺的整体性能。针对钟形振子式角速率陀螺在设计制作过程中未涉及的机电耦合特性展开分析,提出利用弹性力学中的能量原理和拉格朗日方法建立钟形振子机电耦合模型的方法,解决了钟形振子驱动与检测间的多场建模问题,实现了钟形振子的机电耦合关系的线性表征。首先通过分析压电驱动与检测原理,通过坐标变换给出压电电极在钟形振子作用的压电势能表述;利用弹性力学中的能量原理和拉格朗日方法建立钟形振子的机电耦合模型,分析压电电极与钟形振子特性间的关系,确定钟形振子的压电电极参数。最后通过试验手段,验证分析结果的正确性和可用性。
钟形振子式角速率陀螺;钟形振子;角速率测量;机电耦合特性
钟形振子式角速率陀螺是受中国传统大钟启发而来的一种新型轴对称壳谐振陀螺。是一种利用钟形振子壳体上驻波的进动效应,来检测输入角速率的固体波动陀螺。其核心器件为一个类似于毫米级中国传统大钟的钟形振子,通过振子壁上的激励和检测电极,来控制振子振型从而产生特定驻波,并提取驻波的进动来检测输入角速度。其不仅具有传统固体振动陀螺低成本、低功耗、长寿命、高灵敏度的优点外,而且还具有结构简单、抗冲击能力强的特点,能够更好的应用在中低精度角速率测量领域[1-2]。
钟形振子式角速率陀螺利用钟形振子的高品质振动特性,支撑振子底部环向上产生驻波。文献[1,3],对于钟形振子式角速率陀螺的设计、分析和试验过程进行了详细描述,同时对其核心部件钟形振子的振动特性进行了分析。在此基础上,已经研制出了原理样机,并进行了相关试验验证。文献[4],对钟形振子式角速率陀螺的信号解算方法进行了研究,并在试验室环境下对解算方法进行了验证。文献[5]针对传统解算方法的不足,给出了利用自适应滑模方法进行角速率信号提取,从而有效的提高了信号精度。
本文针对钟形振子式角速率陀螺的机电耦合特性展开分析,旨在完善陀螺分析理论,对于设计生产过程提供理论指导。在研究压电驱动检测原理的基础上,利用弹性力学中的能量原理,求解钟形振子式角速率陀螺的机电耦合模型,并对其特性进行分析,最后对机电耦合特性进行测试,验证理论分析的正确性。
1 压电驱动与检测原理
压电材料的自身特性涉及电学和力学之间的约束作用,对于结构振动问题而言,以电场和应变为自变量,应力与电位移为因变量的第2类压电方程描述较为方便,其具体形式如下[1,6]:
(1)
式中:T、ζ分别为压电弹性体的应力张量和应变张量,ϖ、ξ分别为电位移矢量和电场强度矢量,e为压电应力系数张量,cE为恒电场下的弹性刚度系数张量,εs为恒应变下的介电系数张量,上标T为矩阵转置符号[1]。
钟形振子式角速率陀螺选取压电系数较高的压电陶瓷材料PZT-5H作为驱动和检测的压电电极,具体指标见文献[7]。对于这类压电电极,其刚度系数张量和压电应力系数张量,在笛卡尔坐标系下可写为如下形式:
(2)

(3)
式中:压电应力系数(e)、弹性刚度系数(cE)、介电系数εs见文献[7]。
对美国学者Kang等人利用张量分析方法,给出了直角坐标系到正交曲线坐标系的坐标变换矩阵[8-9]
(4)
可将标准笛卡尔坐标系下的压电电极特性问题,转换到了正交曲线坐标系下进行分析,则有
(5)
将式(5)代入式(3)中,利用文献[9]中所述的坐标变换求解方法,可求解出正交曲线坐标系下的刚度系数张量和压电应力系数张量
Tφφ,Tνν,Tθθ,Tφν,Tφθ,Tνθ
(6)
由于公式展开太过复杂,故不再此赘述,求解过程通过Maple软件进行。
对于钟形振子式角速率陀螺而言,压电电极粘贴于钟形振子钟壁上,如图1所示,8个压电电极进行环向均布,每个压电电极均处于钟形振子的刚性轴上,这也是金属壳谐振陀螺的通用电极布置方法。为方便粘接,压电电极应粘贴在钟形振子的圆柱段,这样只有θ方向为圆弧,在φ方向上为直线,保证了粘接的可靠性。而在粘贴纵向位置的考虑上,综合金属壳谐振陀螺的研究趋势,应让压电电极尽量靠近固定端,所以压电电极的上端应紧贴于半球面形结构底部。

图1 压电电极粘贴示意图
压电电极选取的为沿厚度方向极化的压电陶瓷材料,其主要振动模式为长度伸缩振动模式,即横向振动模式。将压电电极粘贴在钟壁上,其驱动输出位移为垂直于压电电极的主平面的位移[6]。此时,压电电极的长度和宽度方向均产生约束,而在厚度方向上不产生约束,即有ν方向电场ξνν不产生ν方向正应力和φθ平面内的切应力,可得其约束条件为
Tνν=0;Tφθ=0;ξφν=0;ξνθ=0
(7)

(8)
式中:Ud为施加到压电电极的电信号,对于ζφφ,有[10]:
(9)
(10)
式中:i为对应的压电电极的位置编号。在钟形振子式角速率陀螺中,1号电极和5号电极为激励电极,故在计算电势能时,i取1和5。φpb、φpt为压电电极对应的下端和上端对应的角度,确定了φpb、φpt即可确定压电电极的长度,θ2(i-1)+1、θ2i为压电电极对应的左右端的角度,确定了θ2(i-1)+1、θ2i即可确定压电电极的宽度。
2 机电耦合模型建立
钟形振子的机电耦合模型,主要是利用弹性力学的能量原理,借助拉格朗日方法,建立钟形振子的等效机电耦合模型。钟形振子在工作过程中,主要存在机械势能、机械动能和电势能。在文献[2]中,根据质点P整体位移的合成矢量,结合外部输入角速率,可以求得钟形振子各质点相对惯性空间的运动速度

(11)
于是可求得每个轴向上的运动速度为

(12)
则可求解出钟形振子的机械动能:

(13)


(14)
可以看出,各主要结构间是由φ方向的值来进行区分的,在计算每一部分动能时分别代入对应结构的坐标约束关系。φht为圆柱面底端的角度,即为旋转抛物面顶端的角度。
同理,可以求得钟形振子的机械势能
=Prh+Prc+Prhp
(15)
式中:Prh为半球面形结构势能,Prc为圆柱面形结构势能,Prhp为旋转双曲面形结构势能,其求解方式与式(14)一致,也是通过φ方向的不同来计算各部分间的势能。

(16)
式中:I0至I9为对应的系数,此部分可通过Maple软件进行求解,不再赘述。
根据求得的电势能、机械势能、机械动能,则可构建拉格朗日函数如下:
Lr=Wr+Tr-Pr=I0(p2+q2)+I2p+I3pq+I4(p′2+q′2)+
2ΩΙ5(p′q-q′p)+2ΩΙ6(p′p+q′q)+I7p2+I8q2+I9pq=
(I0+I7)p2+(I0+I8)q2+I2p+(I3+I9)pq+I4(p′2+
q′2)+2ΩΙ5(p′q-q′p)+2ΩΙ6(p′p+q′q)
(17)
在文献[11]中,给出了该类方程的解法,即构造如下拉格朗日方程组:
(18)
式中:δd为阻尼系数。求解上述方程,便可得到钟形振子的等效机电耦合动力学方程

(19)
于是,可以得到,在考虑压电电极的影响时,钟形振子的固有角频率为

(20)
进动因子为

(21)
特别要指出的是,I2的表达式如式(22):
(22)


由此可以看出,I2衔接了压电电极与钟形振子振动,通过施加外部驱动Ud产生驱动力,激励钟形振子振动。与文献[2]中建立的钟形振子等效动力学模型相比,式(19)在结构形式上基本一致,只是引入了压电电极的作用,在等号的右侧增加了输出的激励表述。
3 特性分析
3.1 固有频率与压电电极参数
式(20)和文献[2]中等效动力学方程求解方法,分别利用不同的方法给出了固有角频率计算公式,利用数值仿真分析方法,对两者进行对比,具体参数选取如文献[2]中参数所示,压电电极宽度2 mm,厚度0.25 mm,长度8 mm,仿真结果如图2所示,图中所示为钟形振子的固有频率。

图2 固有频率仿真结果对比
图2中针对钟形振子的固有频率给出了4种计算结果:有压电电极情况下有限元计算结果、无压电电极情况下有限元计算结果、式(20)和等效动力学方程的计算结果。其中,有压电电极的有限元仿真,是利用文献[12]中方法,将压电电极模型通过导电胶直接粘接在钟形振子的圆柱面形结构的表面,导电胶的参数主要涉及密度、弹性模量、泊松比和厚度,分别为2 000 kg/m3、8.3 GPa、0.38和10 μm[13],建立的有限元仿真模型如图3所示,然后利用文献[2]中模型,计算钟形振子的固有频率,在计算过程中令δd=0,即忽略掉系统阻尼影响。压电电极的结构仿真参数如表1所示。

图3 压电电极粘贴钟形振子有限元模型

参数名称参数范围仿真步长基本值压电电极长度Lp/mm2~80.58压电电极宽度Wp/mm0.5~2.00.12压电电极厚度Hp/mm0.1~0.50.050.2
由图2可以看出,钟形振子在1阶振型至5阶振型固有频率的4种计算方法基本一致,均可反应钟形振子的固有频率特性。为方便起见,利用有限元仿真中的模态分析,研究压电电极的尺寸对钟形振子固有频率的影响,分析结果如图4所示。

图4 钟形振子固有频率与压电电极结构参数间的关系
由图4可以看出,随着压电电极的增大,钟形振子的固有频率会逐渐增大,但是固有频率变化的幅值相对较小。相比于圆杯型振子而言,其压电电极的尺寸变化引起的频率变化远小于钟形振子[14],究其原因,主要是圆杯型振子压电电极粘贴于底部平面,紧贴于固定端;而钟形振子的压电电极置于钟壁上,离自由端较近,对频率的影响相对较大。
3.2 振动幅值与应力
对于钟形振子在压电电极作用下的振动效果和检测效果,建立的机电耦合模型因其未考虑胶层、压电阻尼等影响,仅能反映出钟形振子的频率变化,还不能完全反应全部特性。对于这类复杂场问题,通常采用多物理场耦合方法进行有限元仿真,验证钟形振子在压电电极激励情况下的振动情况,同时提取压电电极的检测应力,验证胶层的传导能力[13-14]。在文献[14]中,作者针对圆杯型振动陀螺的胶层粘接问题,进行了分析,利用有限元仿真方法,给出了胶层粘接的基本特性,并进行了试验验证;文献[14]中,作者针对圆杯型振动陀螺的压电电极问题进行研究,分析了压电电极尺寸对圆杯型振子的影响,进行了相关试验。综合上述两篇文献的仿真方法,本文利用有限元仿真分析,通过多物理场耦合仿真分析手段,利用谐响应分析方法,在压电电极1和5电极端施加5 V的交流电场进行扫频,找到最大振幅读取相关应力。压电电极仿真参数如表所示,钟形振子结构参数如文献[2]中所示。
钟形振子的压电电极紧固于钟形振子圆柱面形结构上,压电电极与钟壁之间靠胶层连接,由于圆柱面形结构特点,压电电极不能完全与其接触,出现的缝隙由胶层填充,如图3所示。钟形振子的最大振幅,出现在中唇部位(红色),如图5(d)所示。提取最大振幅值,对压电电极和胶层参数进行仿真,结果如图5和图6所示。
由图5可以看出,随着压电电极的增大,其驱动力变大,使得钟形振子振幅增大。而当压电电极的厚度为0.25 mm时,振幅最大。这一厚度,恰为钟形振子壁厚的一半,在仿真过程中,钟形振子的壁厚为0.5 mm。这一结论,与文献[14-15]中所得结果一致,这也证明了该仿真分析方法的正确性。因此在钟形振子压电电极的结构选取上,应选取尽量长、尽量宽,厚度为振子厚度一半的压电电极。在样机制作过程中,考虑到压电电极的加工过程与粘贴工艺,故选取宽度为2 mm的PZT-5H压电电极,其长度与钟形振子圆柱面形高度一致,厚度为钟形振子厚度的一半。
由图6可以看出,随着胶层厚度的增加,振幅减小;而当弹性模量为7.2 GPa时,其振幅最大。故在进行胶层选型时,应选取胶层的弹性模量在7 GPa左右,且涂抹时应尽量薄。

图5 压电电极参数对振幅影响仿真结果

图6 胶层参数对振幅影响仿真结果
4 粘接效果测试
按照设计的电极参数,利用制作出的钟形振子,粘贴电极,如图7所示。并对钟形振子的固有频率与输出效果进行测试。
钟形振子的固有频率测试,主要是利用Solartron 1255B扫频仪,对钟形振子的频域特性进行测试。测试的振子利用文献[16-17]提出的振子机械平衡调节方法进行了处理,使得最终钟形振子的频率裂解在0.3 Hz。首先,进行钟形振子激励模态的频率检测,将扫频仪的信号输出端连接至压电电极1和5,将通道1连接至压电电极3,将通道2连接至压电电极7,测试结果如图8所示[2]。此时,测试出钟形振子的激励模态频率为6 930.6 Hz。同理,将扫频仪的信号输出端连接至压电电极2和6,将通道1连接至压电电极4,将通道2连接至压电电极8,测试结果如图9所示,测试出钟形振子的检测模态频率为6 930.3 Hz。
观察两组扫频结果,对应同样功能的电极输出有差异,且激励模态和检测模态频率不一致。在实际加工中,钟形振子的材料特性分布、结构加工误差等外在因素导致其结构不完全对称,影响了钟形振子刚性轴系分布,使得振型发生偏移,同时会引起激励模态和检测模态的频率偏差(这一偏差值称为频率裂解),这一特性是金属壳谐振陀螺的固有特性之一[18]。

图7 钟形振子扫频测试示意图

图8 激励模态扫频结果
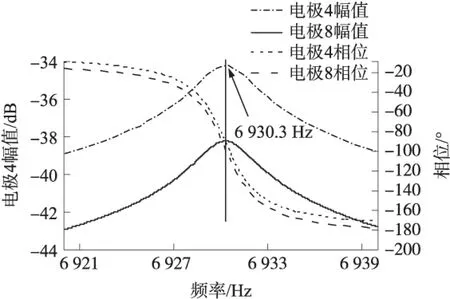
图9 检测模态扫频结果
对制作出的钟形陀螺进行转台跟踪试验,启动5 min后,控制转台以速率模式分别转动±60 °/s、±120 °/s、±180 °/s、±240 °/s、±300 °/s、±360 °/s,每个角速率度转动大于1 min。测试结果如图10所示,可以看出,设计的多回路控制方法,能够准确跟踪转台运动。但会有一定的偏差,这一偏差属于陀螺固有属性,可通过后期标定进行消除。
综上所述,根据分析的钟形振子式角速率陀螺机电耦合特性,设计的压电电极尺寸,满足设计要求,能够适用于钟形振子式角速率陀螺中。
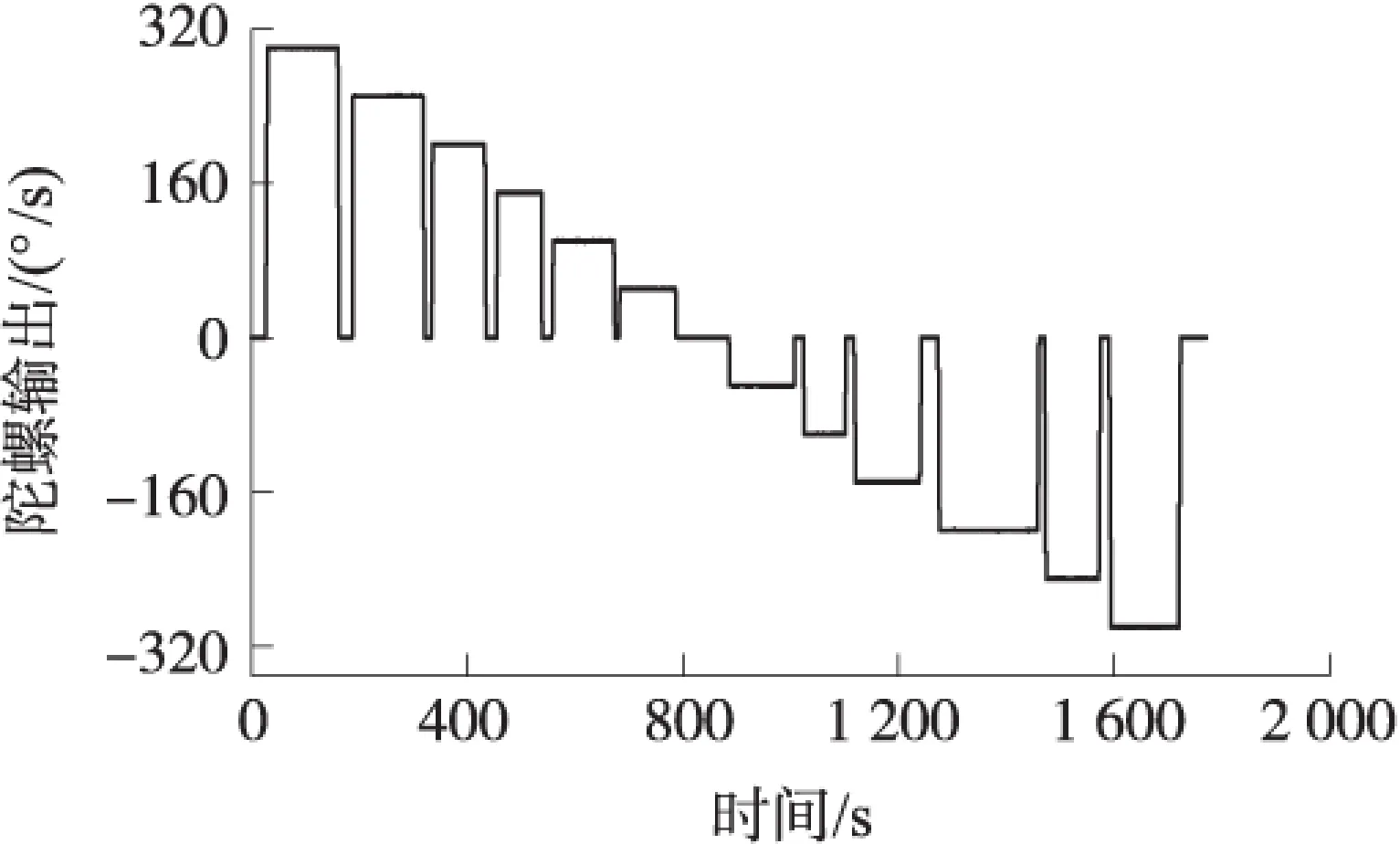
图10 转台跟踪测试
5 结论
钟形振子作为钟形振子式角速率陀螺的核心敏感元件,其机电特性将直接影响钟形振子式角速率陀螺的整体性能。本文通过分析压电驱动与检测原理,通过坐标变换给出压电电极在钟形振子作用的压电势能表述;利用弹性力学中的能量原理和拉格朗日方法建立钟形振子的机电耦合模型,分析压电电极与钟形振子特性间的关系,确定钟形振子的压电电极参数。最后对钟形振子的固有频率和陀螺动态性能进行测试,验证了陀螺电极的基本性能。
[1] Su Z,Fu M,Li Q,et al. Research on Bell-Shaped Vibratory Angular Rate Gyro’s Character of Resonator[J]. Sensors,2013,13(4):4724-4741.
[2] Liu N,Su Z,Li Q. Design and Experiment of a Novel Bell-Shaped Vibratory Gyro[J]. Sensors and Actuators A:Physic,2016,238:37-50.
[3] Liu N,Su Z,Li Q,et al. Characterization of the Bell-Shaped Vibratory Angular Rate Gyro[J]. Sensors,2013,13(8):10123-10150.
[4] Su Z,Liu N,Li Q,et al. Research on the Signal Process of a Bell-Shaped Vibratory Angular Rate Gyro[J]. Sensors,2014,14(3):5254-5277.
[5] Liu N,Su Z,Liu H,et al. Adaptive Sliding Mode Controller for Bell-Shaped Vibratory Angular Rate Gyro,Control Conference(CCC),2014 33rd Chinese,2014:3521-3527.
[6] 王矜奉,苏文斌,王春明,等. 压电振动理论与应用[M]. 北京:科学出版社,2011:8-32.
[7] 陶溢. 杯形波动陀螺关键技术研究[D]. 长沙:国防科学技术大学,2011.
[8] Kang J H. Field Equations,Equations of Motion,and Energy Functionals for Thick Shells of Revolution with Arbitrary Curvature and Variable Thickness from a Three-Dimensional Theory[J]. Acta Mechanica,2007,188(2):21-37.
[9] 郭日修. 弹性力学与张量分析[M]. 北京:高等教育出版社,2004:42-64.
[10] Kristiansen D. Modeling of Cylinder Gyroscopes and Observer Design for Nonlinear Oscillations[D]. Norway:Norwegian University of Science and Technology,2000.
[11] Shatalov M Y,Joubert S V,Coetzee C E,et al. Free Vibration of Rotating Hollow Spheres Containing Acoustic Media[J]. Journal of Sound and Vibration,2009,322(4):1038-1047.
[12] 李邓化,居伟俊,贾美娟,等. 新型压电复合换能器及其应用[M]. 北京:科学出版社,2007:32-71.
[13] 朱炳杰,陶溢,吴宇列,等. 杯形陀螺压电电极粘结胶层对谐振子振动特性的影响规律研究[J]. 传感技术学报,2011,24(9):1248-1252.
[14] 马晓飞,苏中,赵旭,等. 压电电极对圆杯形陀螺振子振动特性影响分析[J]. 仪表技术与传感器,2013(3):11-14.
[15] 马治国,闻邦椿. 智能结构中压电元件的最佳厚度[J]. 东北大学学报(自然科学版),1998,19(6):584-587.
[16] Lin Z,Fu M,Deng Z,et al. Frequency Split Elimination Method for a Solid-State Vibratory Angular Rate Gyro with an Imperfect Axisymmetric-Shell Resonator[J]. Sensors,2015,15(2):3204-3223.
[17] Ma X,Su Z. Analysis and Compensation of Mass Imperfection Effects on 3-D Sensitive Structure of Bell-Shaped Vibratory Gyro[J]. Sensors and Actuators A:Physical,2015,224:14-23.
[18] 马特维耶夫B A,利帕特尼科夫B И,阿廖欣A V,等. 固体波动陀螺[M]. 杨亚非,赵辉,译. 北京:国防工业出版社,2009.

刘 宁(1986-),男,汉族,博士,助理研究员,籍贯北京。主要从事惯性器件和高动态IMU研究;

苏 中(1962-),男,汉族,博士,教授,博士生导师,籍贯安徽。主要从事惯性器件、高动态IMU 和组合导航的研究。
Electromechanical Coupling Characteristics Analysis ofBell-Shaped Vibratory Angular Rate Gyro*
LIU Ning1*,SU Zhong1,2
(1.School of Automation,Beijing Information Science and Technology University,Beijing 100101,China;2.Institute of Intelligence Control,Beijing Information Science and Technology University,Beijing 100101,China)
Bell-shaped resonator as the core of the bell-shaped vibratory angular rate gyro(BVG),which will directly affect the electromechanical coupling characteristics of BVG’s overall performance. For BVG in design making process in the not involved of electromechanical coupled characteristics expand analysis,proposed using elastic mechanical in the of energy principle and Lagrange method established bell-shaped resonator coupled model of method,solution has bell-shaped resonator drive and detection between of multi-field built problem,achieved has bell-shaped resonator of electromechanical coupled relationship of linear characterization. Firstly,it detected through the analysis of piezoelectric-driven principles by coordinate transformation given piezoelectric potential of the electrode in the bell-shaped resonator function can be stated using elastic energy in principle and Lagrange method of electromechanical coupling model of bell-shaped resonator,analysis of relationship between electrode and bell-shaped resonator,bell-shaped resonator electrodes piezoelectric parameters were determined. Through a means test to verify results and availability.
bell-shaped vibratory angular rate gyro;bell-shaped resonator;angular rate measurement;electromechanical coupling characteristics
项目来源:国家自然科学基金项目(61471046);北京市自然科学基金项目(4172022);北京市教委市属高校创新能力提升计划项目(TJSHG201510772017);北京市科技专项项目(Z161100005016109);高动态导航技术北京市重点实验室开放课题项目
2016-08-19 修改日期:2017-02-27
TP212.1
A
1004-1699(2017)07-0977-08
C:7230
10.3969/j.issn.1004-1699.2017.07.001
