考虑自由表面的组合拖曳体阻力计算与设计优化
2017-08-07李雪剑,刘志军,刘戈,林焰*,3
李 雪 剑,刘 志 军,刘 戈,林 焰*,3
(1.大连理工大学 船舶工程学院, 辽宁 大连 116024;2.中国船舶重工集团公司 第七六〇研究所, 辽宁 大连 116001;3.大连理工大学 工业装备结构分析国家重点实验室, 辽宁 大连 116024 )
考虑自由表面的组合拖曳体阻力计算与设计优化
李 雪 剑1,刘 志 军2,刘 戈1,林 焰*1,3
(1.大连理工大学 船舶工程学院, 辽宁 大连 116024;2.中国船舶重工集团公司 第七六〇研究所, 辽宁 大连 116001;3.大连理工大学 工业装备结构分析国家重点实验室, 辽宁 大连 116024 )
拖曳体作为一种水下设备,主要用于水下探测、海底地形勘探.其可以按照具体的需求进行设计,故拥有较强的实用性.组合拖曳体具有多个单体,结构复杂,相互干扰之下使得兴波阻力难以计算.因此以一种拥有水上部分的大型组合拖曳体的设计为背景,借助模型拖曳阻力试验,基于CFD理论,使用Star CCM商业软件,配合笛卡尔网格的离散形式,对水面拖曳体的阻力进行计算.通过与试验阻力值的对比,验证了数值算法的准确性.同时,基于计算结果及设计约束条件,对拖曳体结构外形进行优化,并使用数值方法进行了计算,计算结果表明优化后的拖曳体总阻力值有25%的下降.
组合拖曳体;阻力优化;外形设计;模型试验;数值仿真
0 引 言
随着现代海洋开发需求的增长,水下探测设备的建造和使用得到了快速的发展.目前,水下探测设备主要分为两种:无人水下航行器和载人水下航行器,其中无人型又可以分为遥控式(remote operate vehicle, ROV)、自主航行式(unmanned underwater vehicle, UUV或autonomous underwater vehicle, AUV)和拖曳式三种[1].拖曳系统由于其结构简单,可以利用拖船将它沉到很深的地方,并能以较高的速度拖曳[2],具有广泛的应用.通常它是由拖曳体和拖缆组成,其中拖曳体可用于搭载营养盐等海洋化学元素探测传感器或光、声等物理探测传感器.鉴于此,对于拖曳系统的相关研究,已经成为现代海洋开发与应用的重要课题之一.
目前对拖曳体的研究侧重于水下的拖曳体如声呐、鱼雷等,以及水上的大尺度拖曳体如轮船、海上平台等[3];而对于具有水面结构的组合式拖曳体的研究甚少,这是因为组合拖曳体具有多个单体,结构复杂,单体相互干扰之下使得阻力难以计算.在工作拖速时,沿水面运动的浮体既不是处于漂浮状态又不是处于滑动状态,而是处于一种过渡运动状态.这一状态使得要从理论上确定作用在运动浮体上的黏性阻力和兴波阻力有很大困难.
本文的研究背景是一个用于水面试验、水下勘探的大型组合式拖曳体的设计,其有4个可以任意组合的用于实际工况的单体,及一个用于提供浮力的浮箱单体.由于实际拖航中浮箱及其中一个单体露出水面以上,在数值计算该拖曳体的总阻力时,既要考虑自由液面的影响,也要考虑单体之间的相互作用.针对于此,本文基于CFD理论,使用商业软件Star CCM对拖曳体模型的阻力算法进行研究,通过与试验模型阻力值的对比,验证数值计算方法的准确性,并根据计算结果,结合拖曳体设计中的约束条件,对拖曳体水面部分的外形进行阻力优化.
1 数值计算原理
1.1 控制方程
对于不可压缩的黏性流体,连续性方程可写为[4]
∂(ρui)/∂xi=0
(1)
为了计及黏性流体湍流运动,需对瞬态Navier-Stokes方程做时间平均处理.时均形式的Navier-Stokes方程(Reynolds-Averaged Navier-Stokes,即RANS方程)为
(2)
式中:ui、uj为速度分量时均值(i,j=1,2,3);p为压力时均值;ρ为流体密度;μ为动力黏性系数;ρuiuj为雷诺应力项,上划线表示对物理量取时间平均.
1.2 计算区域离散化
本文在计算区域划分上,使用STAR-CCM+的切割体网格(trimmer mesher),其属于笛卡尔网格,具有自适应的划分方式.相比于结构网格和非结构网格,其具有以下优点:
(1)在保证网格单元偏斜度最小的情况下,生成尽可能多的六面体网格,根据需要,可以自定义细化控制条件以生成高质量的网格,而且可以在用户指定的坐标系下进行调整.
(2)网格不依赖于模型外形生成,因此不需要像结构网格和非结构网格那样先生成面网格后再生成体网格,所以网格的生成过程更加简单、省时.
(3)与贴体结构网格相比较,它不需要在分块网格之间交换复杂的流场信息,计算更加简便,可以实现流场计算的自适应.
(4)笛卡尔网格对流场空间的填充效率高,所以能够缩短流场计算时间[5].
1.3 Realizablek-ε双方程模型
Realizablek-ε双方程模型由Shih等提出[6],是在标准k-ε方程基础上,采用新的湍流黏度公式,根据动态的均方根涡量扰动量公式,推导出的新的ε输运方程.这样,Realizablek-ε模型可以更好地处理流动特性中的强流线曲率、涡流和旋转流的效应(见ANSYS Fluent Theory Guide).其中湍动能k和湍流耗散率ε的输运方程分别如下两式所示:

(3)
(4)
1.4 VOF算法
本文采用VOF算法对自由液面进行捕捉.VOF算法通过对不同相之间体积分数的计算,并保证总体积分数为1,来求取其他相关标量.其常用于互不相溶流体之间的数值网格计算,并能很好地模拟混合相之间的交界面.标准VOF模型数值计算式为
(5)
(6)
(7)

另外,Star CCM(见User Guide STAR-CCM+®Version 9.04)针对表面重力流的两相流模型,提出了VOF Wave模型,主要用于描述密度相差较大的互不相溶的两相流的流动问题.同时,该模型中考虑壁面反射波影响,它根据Choi等[7]提出的方法,在ω速度分量方程中增加一个阻力项:
(8)
(9)
式中:xsd是阻尼波的起始点(沿x方向传播),xed是阻尼波的结束点(边界),f1、f2和nd是阻尼模型的参数;ω是垂向速度分量.
2 试验准备
2.1 试验模型
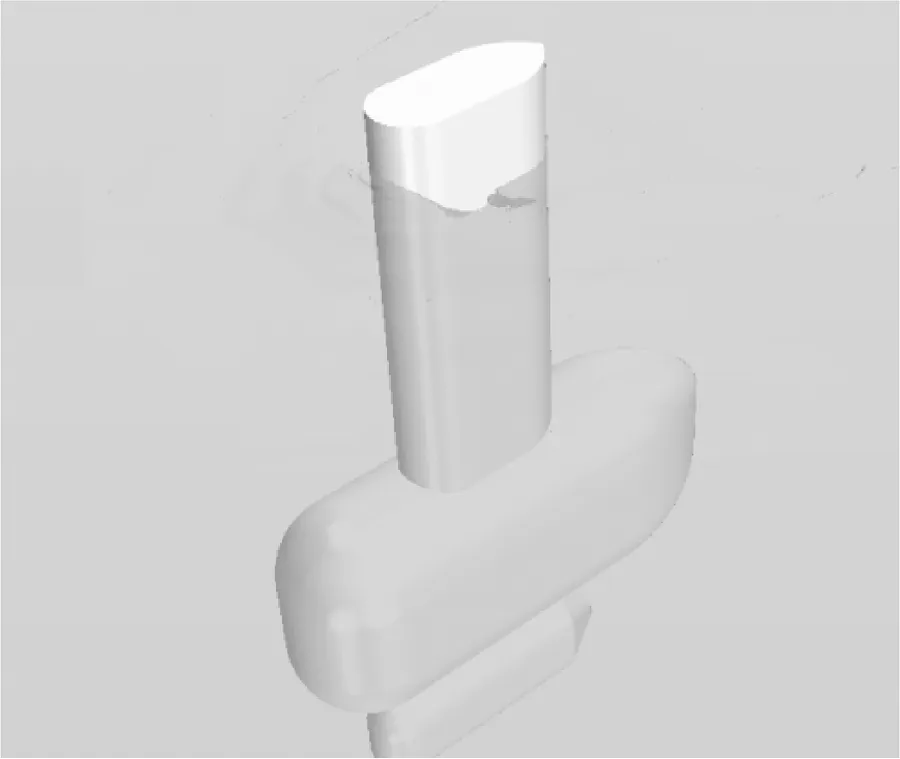
本试验中,由于存在自由液面,试验模型会产生兴波阻力,因此,试验在保证弗劳德数相似的条件下,对实体模型进行几何等比例缩小,缩尺比为1∶4.试验模型的外形如图1所示,其材质为玻璃钢,并在内部设置钢制骨架用于支撑整个模型的结构.模型依照实际拖曳体的外形划分为3部分:浮箱、主体、副体,经过几何相似换算,模型吃水应为0.2 m.拖曳体外形主要通过圆弧进行过渡,副体与主体通过螺栓进行刚性连接,三部分的主尺度如表1所示.模型使用填充在浮箱中的浮力材料产生浮力,主体与副体的两侧分别设置一个工作孔,用于调节内部压载块,保证模型与实际拖曳体的重量吃水位置相似,工作孔在试验中为封闭状态.同时,压载块用磁铁固定于主体、副体内部的铁质平板.在主体与浮箱表面设置与实际拖曳体一样位置的拖缆孔,用于试验设备对模型的拖曳.拖缆设置成“三线汇聚”的方式,与水池的拖车拖曳装置及拉力计相连.为不影响拖曳体的重心位置,拖缆使用细钢缆及小卸扣进行模拟[8].
(a) 主体

(b) 副体图1 试验模型外形图Fig.1 Configuration diagram of test model
表1 试验模型主尺度Tab.1 Main scales of test model
2.2 试验设备
试验场地选取在大连理工大学船模拖曳水池,使用船模拖曳水池内的拖车对模型进行试验.水池长170 m、宽7 m、深4 m,拖车自重13 t, 拖车最大速度8 m/s.
模型阻力的测量选用拉压传感器,配合动态信号测试分析系统,对拉压传感器输出的电信号进行采集,并转换为数字信号输入电脑.为了更好地监测拖曳体拖曳的稳定性及浮态变化,在模型顶端设置了动态倾角传感器,其可以检测横滚、俯仰以及航向3个角度的动态变化情况.同时,由于其体积小、质量轻,不会对模型的运动情况产生附加影响.3种试验设备的具体参数指标分别如表2、3、4所示.
表2 拉压传感器技术参数Tab.2 Technical parameters of tension and compression sensor
表3 动态信号测试分析系统基本技术参数Tab.3 Basic technical parameters of dynamic signal test and analysis system

表4 动态倾角传感器的具体参数Tab.4 Specific parameters of dynamic tilt sensor
2.3 试验流程及工况
按照实际拖曳体的设计航速,通过弗劳德数相等换算出模型试验的航速进行拖曳试验,换算出的试验航速分别为0.5、1.0、1.5、2.0 m/s,每一组拖曳试验重复3次,在每次试验之前首先使用压载块调节模型吃水至0.2 m,连接模型的拖缆与试验拉力支杆的拖线,并将拖曳体中纵剖面位置调整至与拉力支杆同一平面内,之后使模型缓慢加速至指定航速.拖曳体在指定航速下拖航一段时间,在拖曳体的姿态基本平稳后开始阻力数据的收集,之后对收集来的数据做算术平均,该值就可认为是指定航速下拖曳体受到的阻力.
3 数值计算模型
模拟拖曳水池,对计算模型建立外流场,并引入VOF Wave模型模拟流场中的二相流动,空气与水的流速均为试验航速.对流场指定边界条件,其中来流方向为x轴的负方向,故入口与出口分别指定为速度入口与压力出口.由于只建立一半模型,故将计算模型的中纵剖面所在的平面指定为对称面.同时为了适应软件的VOF Wave模型,流场上下表面也指定为速度入口.对所有的速度入口中加入VOF Wave相应的速度、体积分数场函数,将VOF Wave的静水压力场函数赋予压力出口,避免相的回流.
对计算模型使用笛卡尔网格进行划分(如图2所示),并使用棱柱层(如图3所示)来模拟边界层效应.VOF模型中的体积分数计算完全取决于网格的精细程度,所以使用软件中的网格体积控制功能,使计算模型周围的网格进行渐变,以及加密自由液面附近的网格.
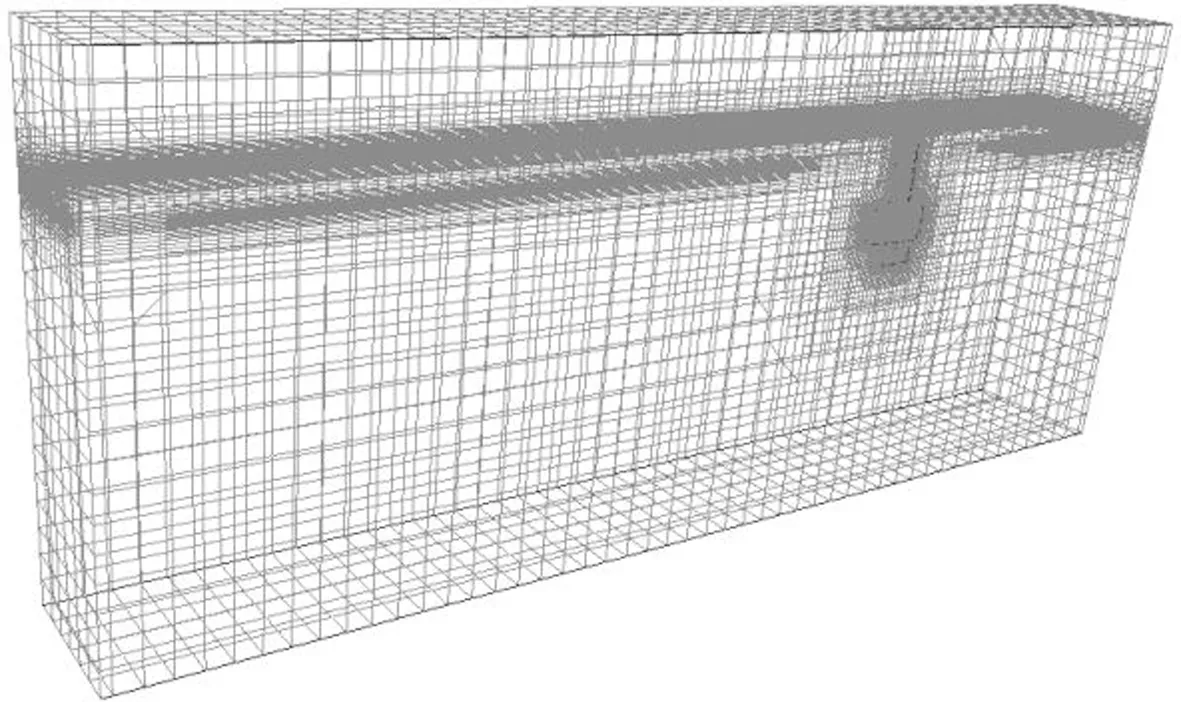
图2 计算域网格Fig.2 The grid of computational domain
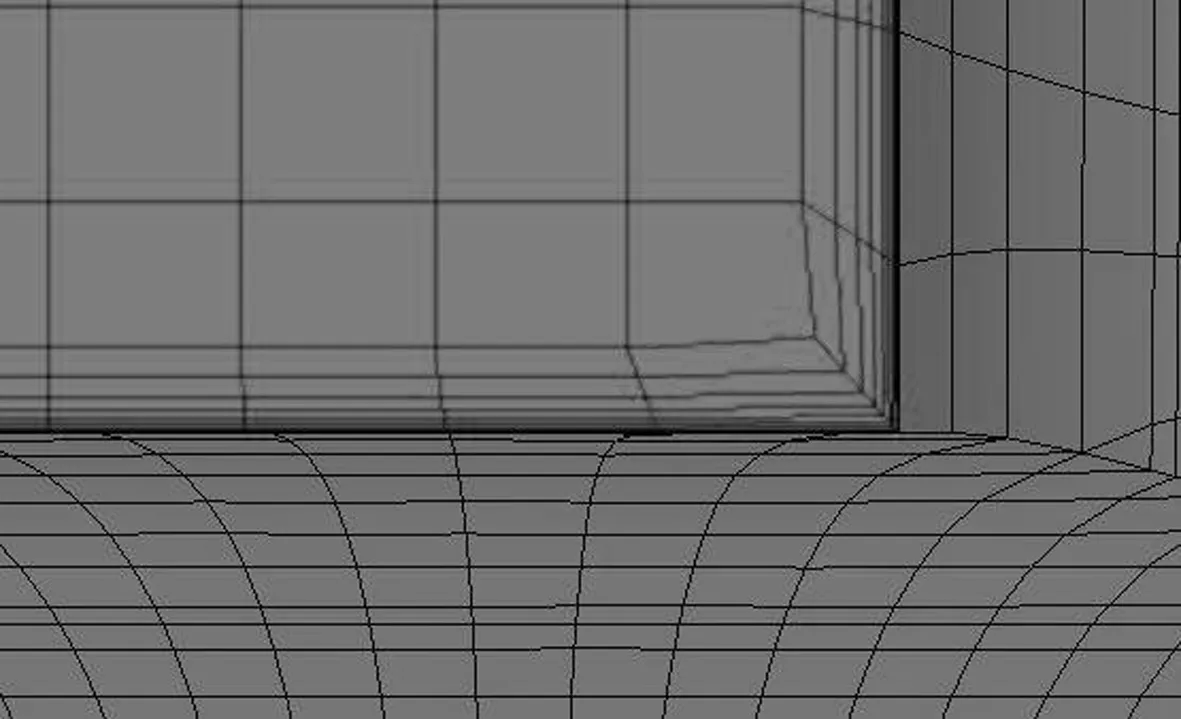
图3 计算域的棱柱层网格Fig.3 Prism layer mesh of computational domain
数值计算选用Realizablek-ε双方程模型模拟湍流,二相流的模拟选取VOF多相流模型,使用隐式非定常算法进行计算,步长依照CFL数进行选取,具体如表 5所示.
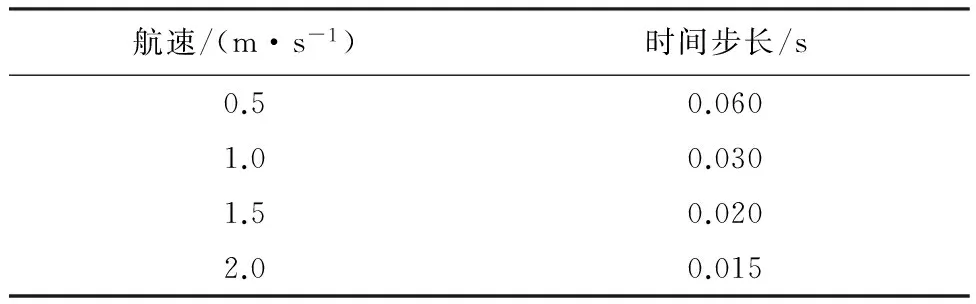
表5 时间步长Tab.5 Time step
本文采用叠模算法研究总阻力中兴波阻力所占比例,为此建立拖曳体叠模计算模型(如图4所示)求解船舶所受的黏性阻力.

图4 叠模算法计算域网格Fig.4 The grid of computational domain of stack-moldnalgorithm
4 结果的比较与分析
通过拖曳试验可以发现,随着航速的增加,浮箱兴起的波浪不断升高,同时,前后端的吃水相差增大,浮箱后端形成的尾流浪花翻滚加剧,数值试验得出的结果也与试验结果互相印证(如图5所示).运用叠模算法分离总阻力中的兴波阻力(如表6所示),证实了随着弗劳德数的增加,兴波阻力占总阻力的比重加大.
对4种航速的数值计算结果与试验结果进行了对比,结果如表7所示,在低航速(0.5、1.0 m/s)下计算结果与试验结果可以保持很好的吻合度,而在高航速(1.5、2.0 m/s)下计算误差逐渐增大,尤其2.0 m/s时,计算误差达到15%,这是因为随着弗劳德数的增加,兴波阻力的增大导致模型产生了微幅的运动,而数值模拟中模型边界条件为静止的固壁,所以在作高弗劳德数下的总阻力预报时,误差偏大.试验和数值计算阻力拟合曲线见图6.
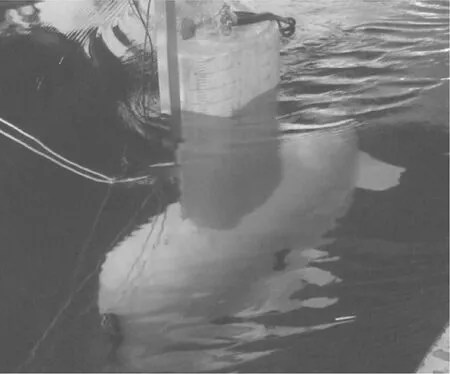
(a) 0.5 m/s

(b) 1.0 m/s
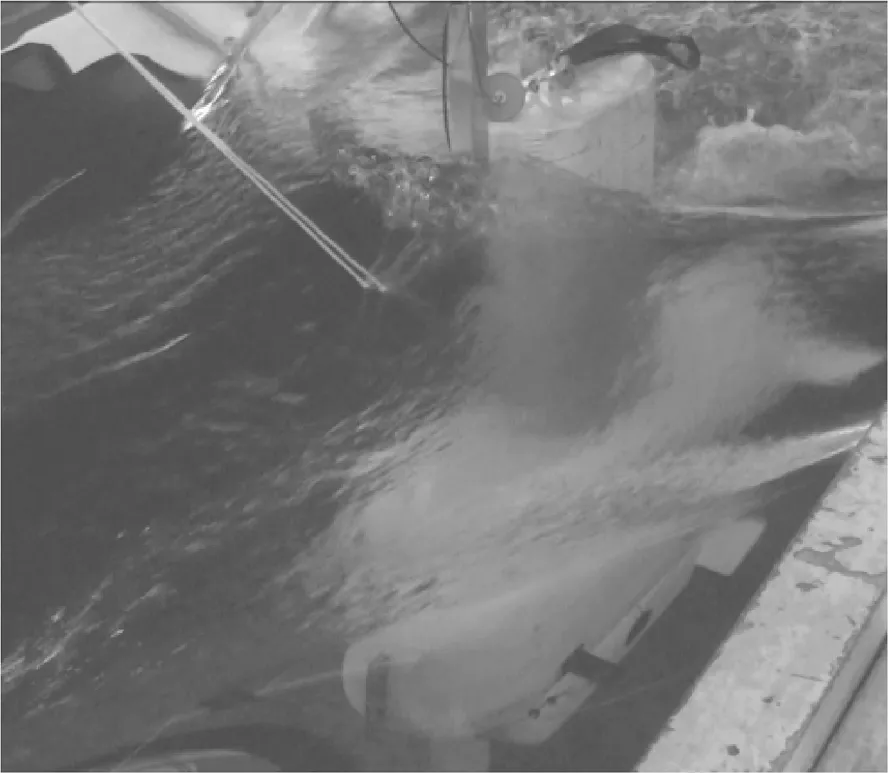
(c) 1.5 m/s

(d) 2.0 m/s图5 不同航速下的模型拖曳试验与数值计算结果对比Fig.5 Comparison between model towing experiment and numerical calculation results under different speeds
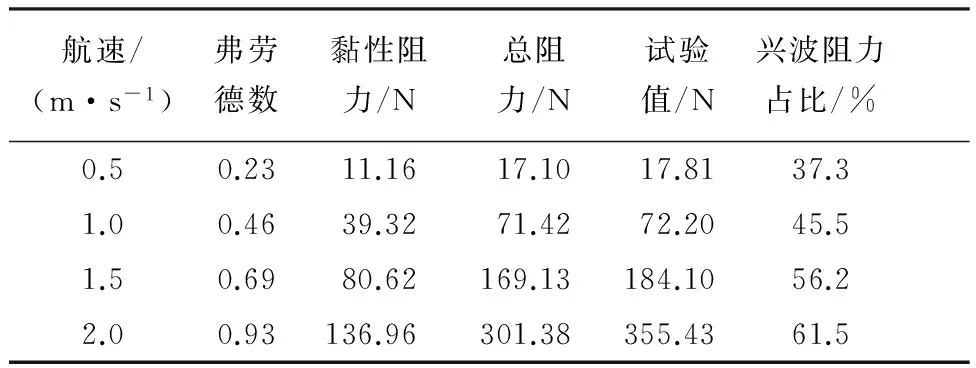
表6 叠模算法分析阻力成分表Tab.6 Resistance ingredient list of stack-mold algorithm
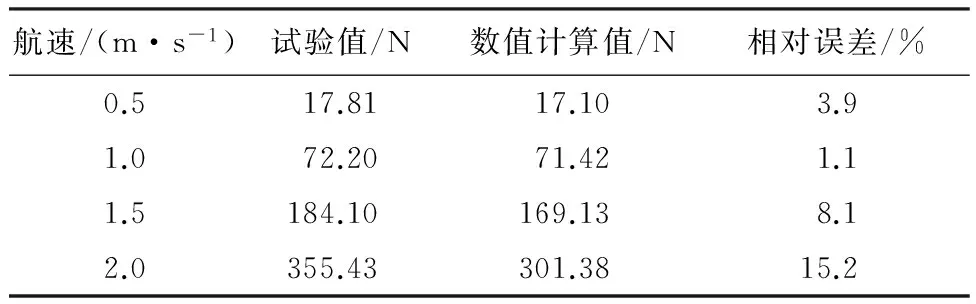
表7 试验模型与数值模型阻力值对比Tab.7 Comparison of resistance values between experimental model and numerical model
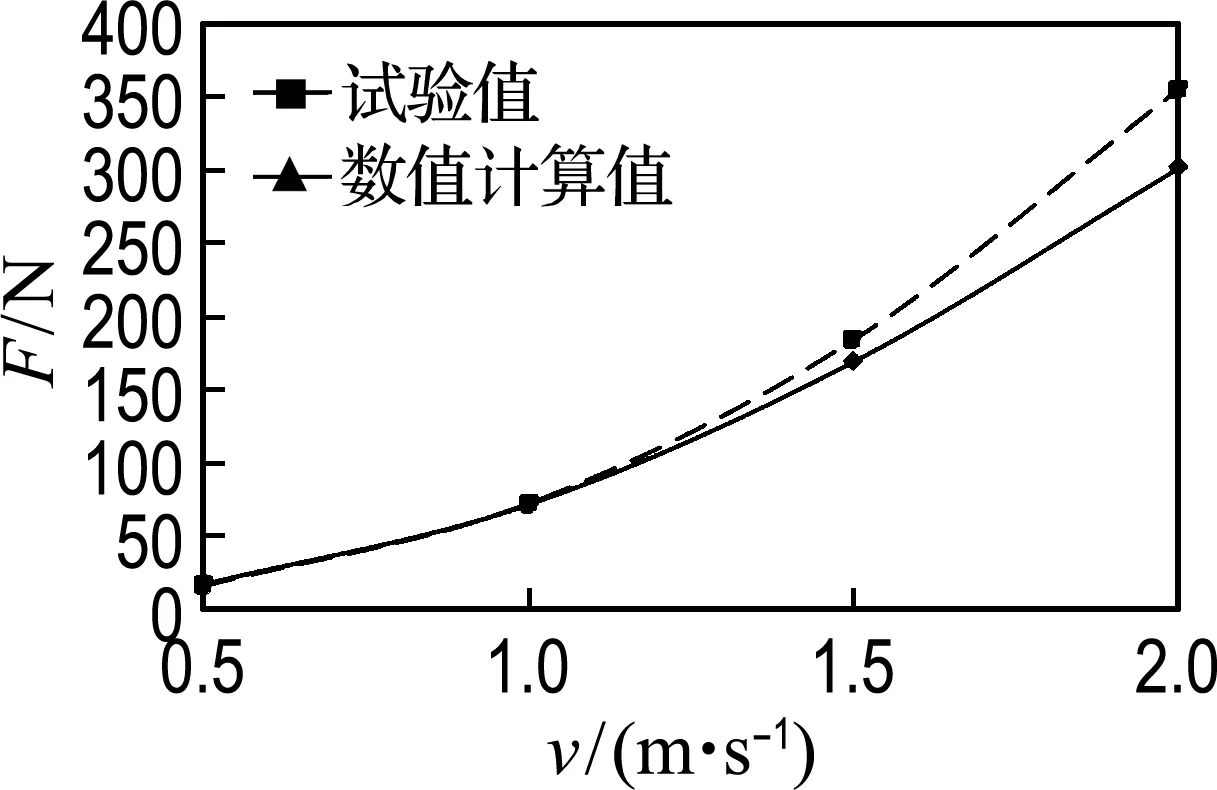
图6 不同航速下拖曳模型的试验和数值计算阻力值曲线
Fig.6 Experimental and numerical calculation resistance value curve of towed body model under different speeds
5 优化设计结果对比分析
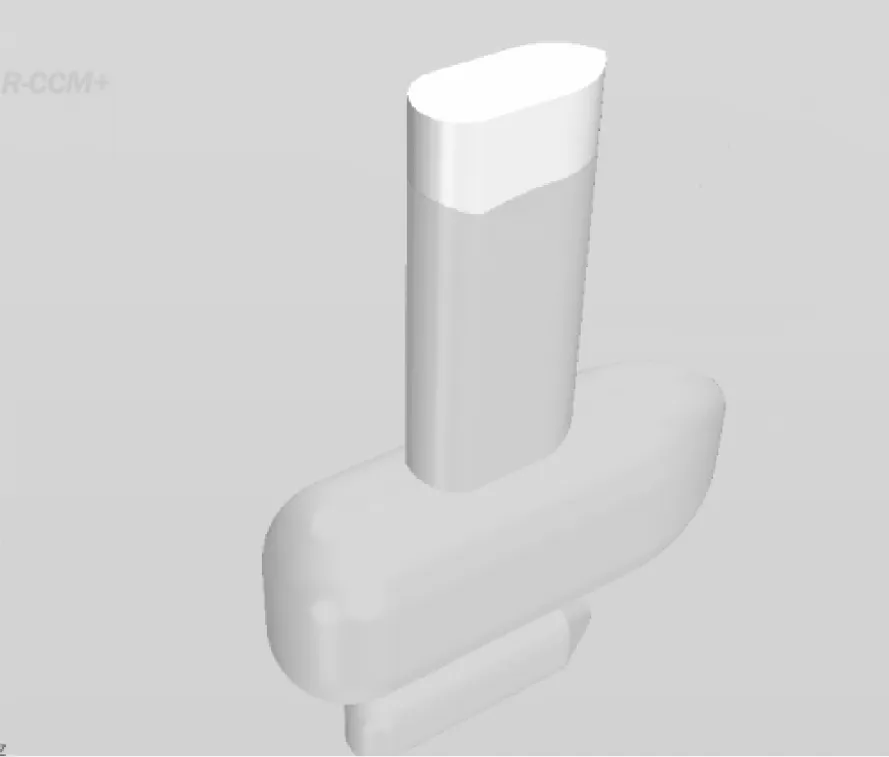
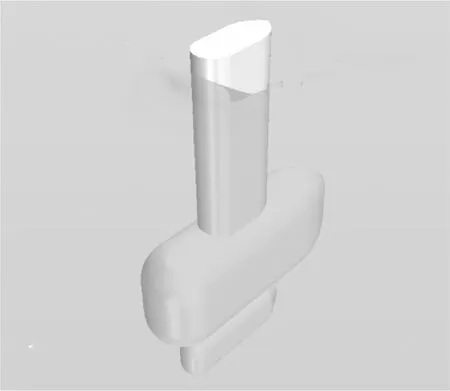
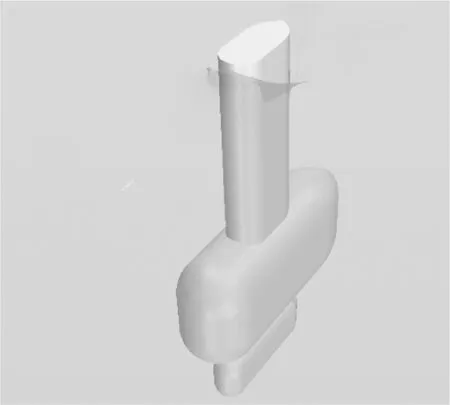
通过计算与试验可以发现,浮箱产生的兴波阻力增大了拖曳总阻力,尤其在高航速下;同时,兴波的增大导致拖曳体产生了一定的运动,且浮箱前后端的吃水差过大,在实际拖曳作业时,会严重影响拖曳体的稳定性.基于以上原因,对拖曳体的浮箱进行优化,考虑到浮箱设计的约束条件:(1)提供满足要求的浮力,且拖曳体吃水位置保持不变;(2)浮箱内用于提供吊装支撑的竖直强构件的连续性,保证拖曳体的结构强度要求.基于以上两个约束条件,优化的具体方法为将浮箱前端的半圆形过渡,替换为双圆弧过渡,使浮箱前端变尖(如图7所示).增大浮箱水平截面的长宽比,由原来的2.26∶1改变为3.46∶1.此外,将主体与副体的连接部分设置为前后可调状态,实际工况中,可通过副体的前后调节适应不同航速下的阻力,使拖曳体保持良好的浮态.
由于算法的适用性已得到验证,故使用前文的数值计算方法分析拖曳体优化效果.为了便于比较,将优化后的拖曳体以1∶4的缩尺比进行建模.流场划分形式、边界条件的指定,及网格的生成均与前文验证过的算法保持一致.基于前文的数值计算方法利用Star CCM进行隐式非定常计算,时间步长选取为0.015 s.
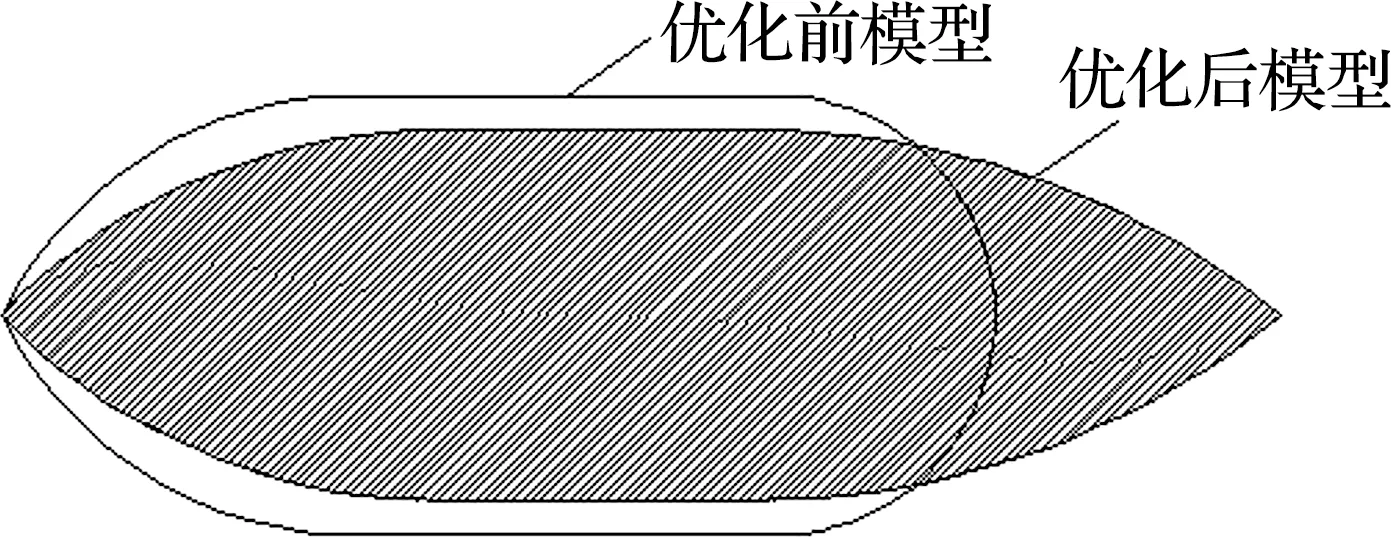
图7 优化前后的浮箱截面对比Fig.7 Comparison of buoyancy tank cross-sectionsnbefore and after optimization
待拖曳体阻力曲线稳定后,得出优化后的拖曳体模型的阻力值,如表8所示,对比优化前数值计算结果,阻力值下降25%.对比两种计算模型的自由液面波高图(如图8所示)可以发现,优化后的模型,尾流分离点延后,证明浮箱前端外形的改进起到了减弱兴波阻力的作用.另外,从两个模型的体积分数图(如图9所示)可以明显发现,优化后的模型兴波高度大幅下降.

表8 优化前后阻力计算值的比较Tab.8 Comparison of calculated resistance values before and after optimization
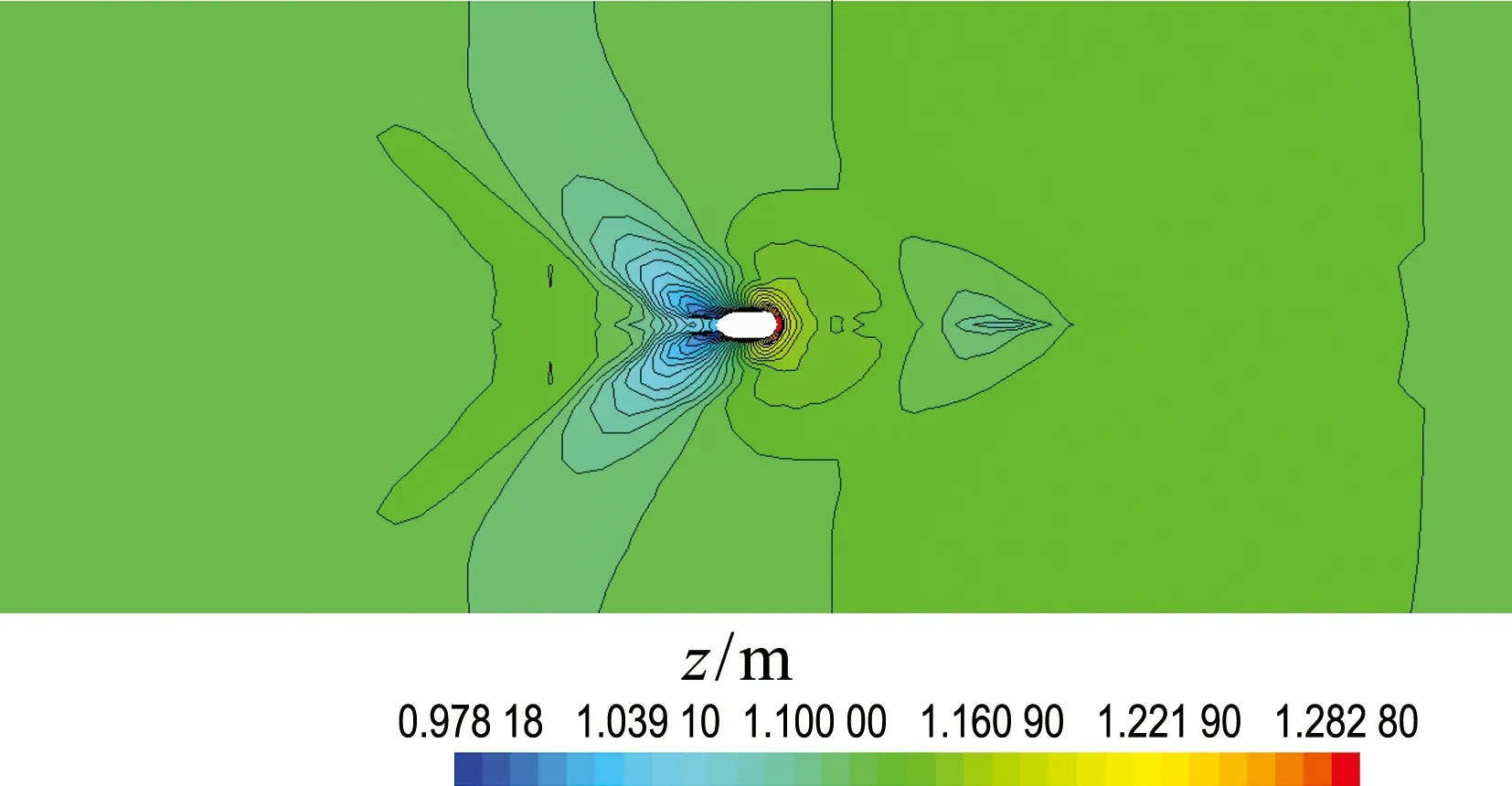
(a) 优化
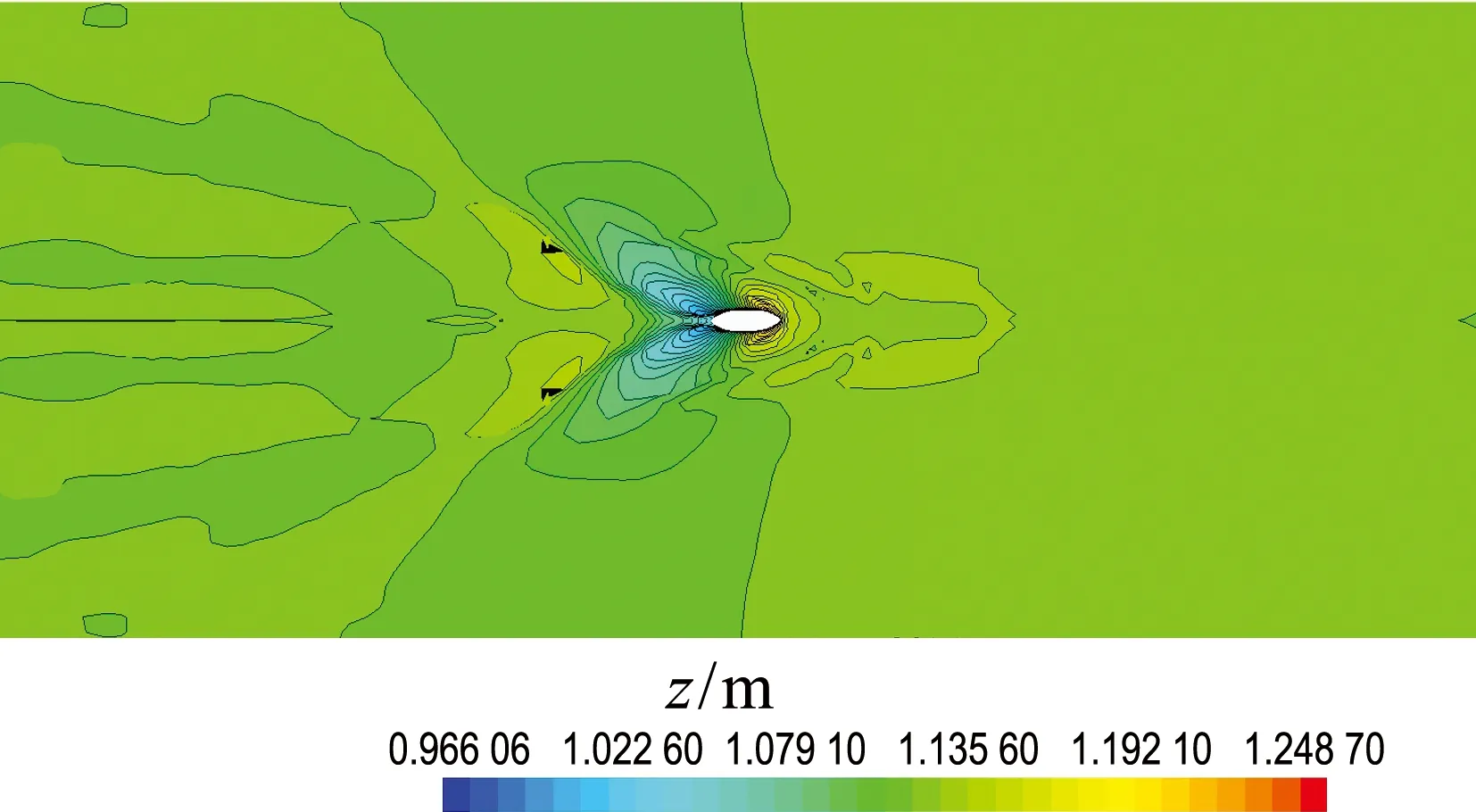
(b) 优化后
图8 两种计算模型自由液面波高优化前后对比
Fig.8 Comparison of free surface wave height of two models before and after optimization
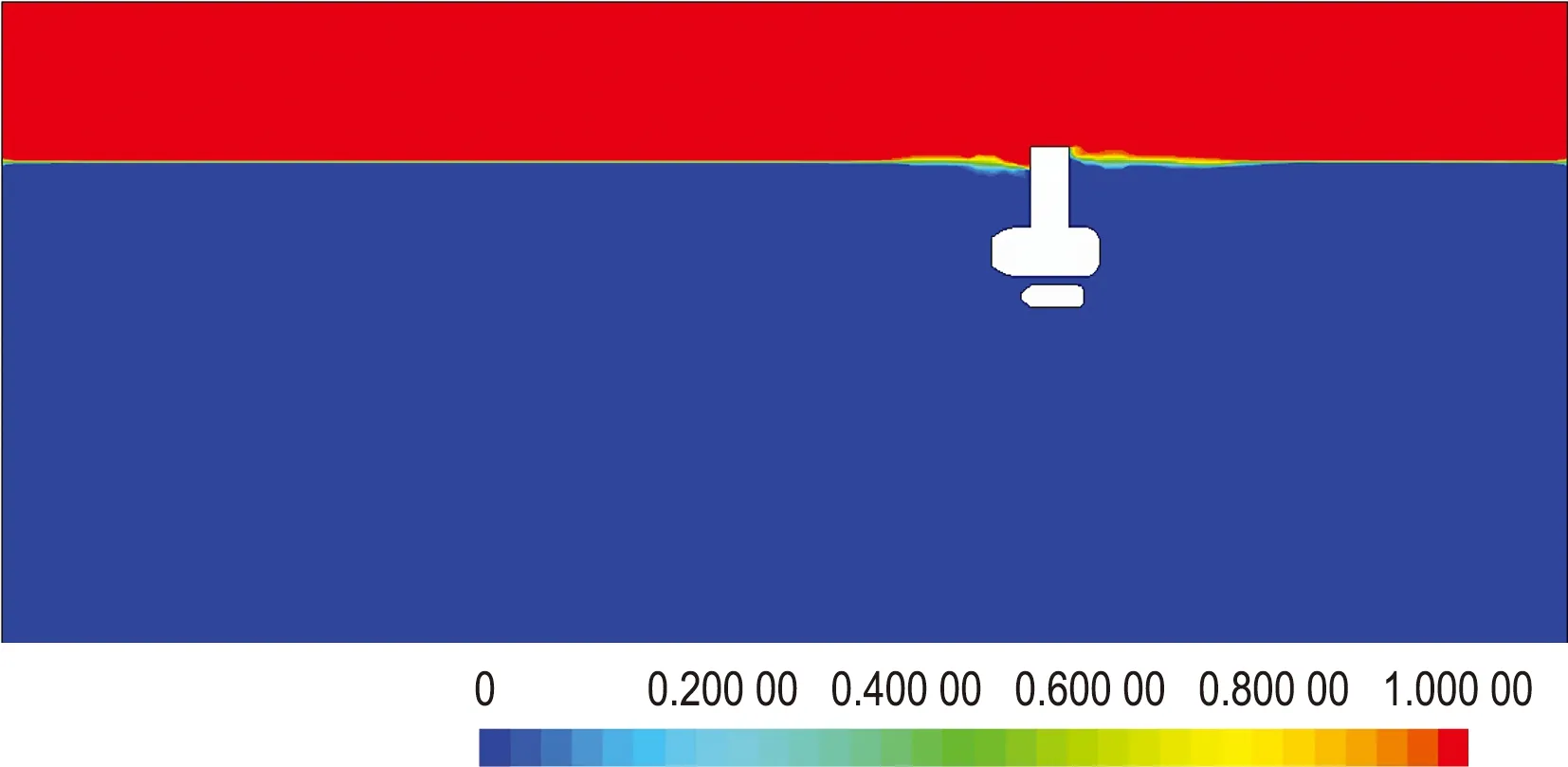
(a) 优化前
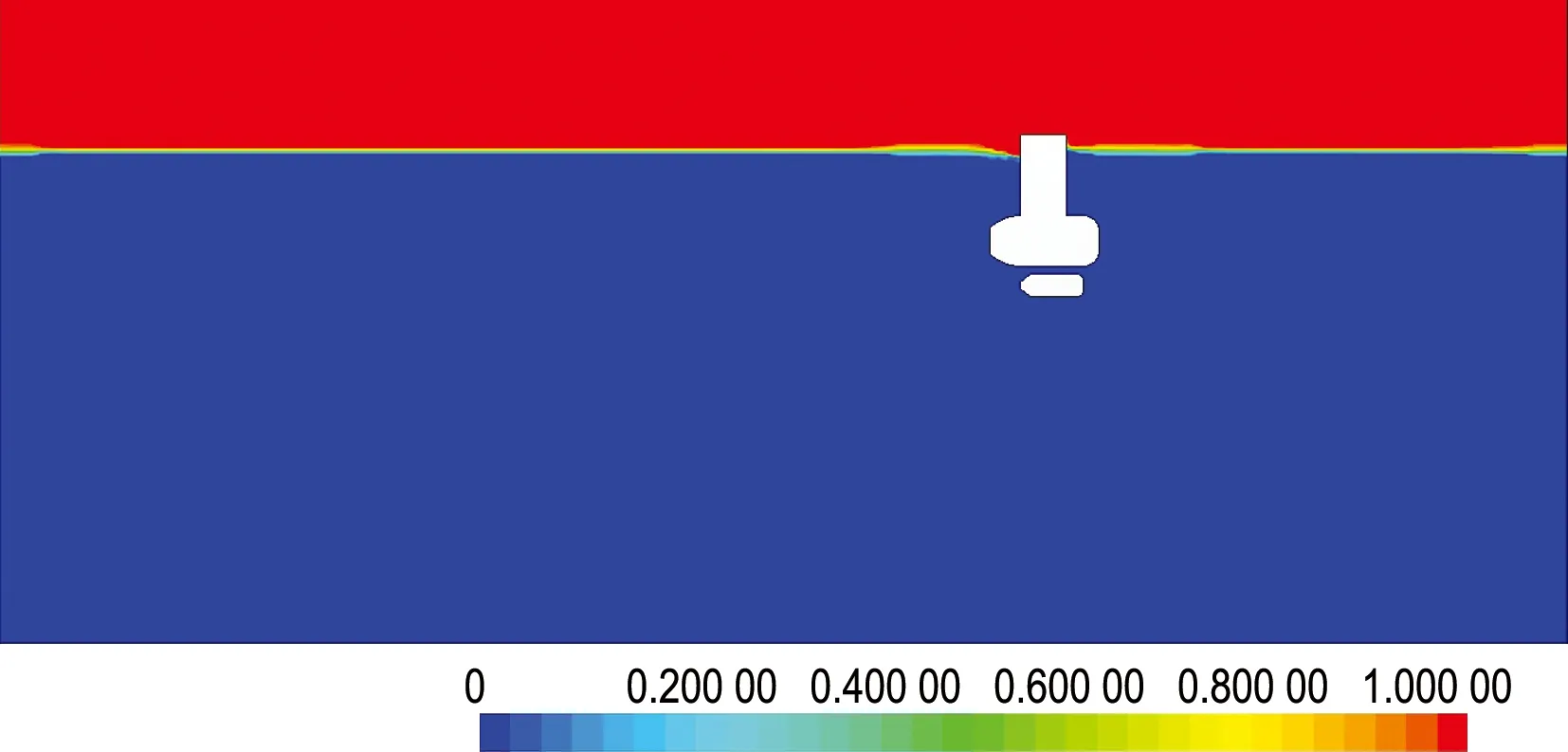
(b) 优化后
图9 两种模型的体积分数优化前后对比
Fig.9 Comparison of volume fractions of two models before and after optimization
6 结 语
本文针对水面拖曳体受自由液面影响较大阻力难以计算的问题,基于CFD理论,应用STAR CCM软件,提出了合理的网格划分方案和求解设置,并通过模型试验验证计算结果良好.本文为了减小水面拖曳体兴波阻力的影响,对拖曳体的浮箱进行了设计优化.在保证浮力及吃水位置的前提下,增大浮箱水平截面的长宽比,将前端由半圆形过渡,改为双圆弧过渡,使浮箱前端变尖,根据分析得到的阻力计算方法结果,发现优化后的模型兴波高度大幅下降.因此,本文的研究成果可以作为具有水面结构的组合拖曳体阻力计算和优化的参考.
[1]张 攀. 拖曳系统运动仿真计算[D]. 武汉:武汉理工大学, 2005.
ZHANG Pan. The simulation of the movement of towed system [D]. Wuhan:Wuhan University of Technology, 2005. (in Chinese)
[2]刘显龙. 水下拖曳体外形设计及其水动力学性能分析[D]. 大连:大连理工大学, 2010.
LIU Xianlong. Form design and hydrodynamic analysis of underwater towed vehicle [D]. Dalian:Dalian University of Technology, 2010. (in Chinese)
[3]张勇武,郑 荣. 自由表面上球形浮体的拖曳运动仿真与试验[J]. 计算机仿真, 2008, 25(4):339-342.
ZHANG Yongwu, ZHENG Rong. Numerical simulation and experiment of a towed sphere on free surface [J]. Computer Simulation, 2008, 25(4):339-342. (in Chinese)
[4]邹 劲,姬朋辉,孙寒冰,等. 网格因素对三体滑行艇阻力计算影响探究[J]. 船舶, 2016, 27(3):8-14.
ZOU Jin, JI Penghui, SUN Hanbing,etal. Influence of mesh on resistance calculation of trimaran planing hulls [J]. Ship & Boat, 2016, 27(3):8-14. (in Chinese)
[5]刘 刚,肖涵山,陈作斌. 自适应笛卡尔网格生成及其应用[C] // 2003空气动力学前沿研究论文集. 北京:中国宇航出版社, 2003:273-279.
LIU Gang, XIAO Hanshan, CHEN Zuobin. Adaptive Cartesian grid generation and its application [C] // 2003 Proceedings of the Aerodynamic Frontier Research. Beijing:China Aerospace Press, 2003:273-279. (in Chinese)
[6]SHIH T-H, LIOU W W, SHABBIR A,etal. A newk-εeddy viscosity model for high Reynolds number turbulent flows [J]. Computers & Fluids, 1995, 24(3):227-238.
[7]CHOI J, YOON S B. Numerical simulations using momentum source wave-maker applied to RANS equation model [J]. Coastal Engineering, 2009, 56(10):1043-1060.
[8]林 焰,张志康,于雁云,等. 一种大型水下组合拖曳装置及其使用方法:ZL201520277547.6 [P]. 2015-11-04.
LIN Yan, ZHANG Zhikang, YU Yanyun,etal. A large underwater combined towed device and the usage method:ZL201520277547.6 [P]. 2015-11-04. (in Chinese)
Resistance calculation and optimization design for composite towed vehicle considering free surface
LI Xuejian1,LIU Zhijun2,LIU Ge1,LIN Yan*1,3
(1.School of Naval Architecture & Ocean Engineering, Dalian University of Technology, Dalian 116024, China;2.760th Research Institute, China Shipbuilding Industry Corporation, Dalian 116001, China;3.State Key Laboratory of Structural Analysis for Industrial Equipment, Dalian University of Technology, Dalian 116024, China )
The towed vehicle is a kind of marine equipment, which is mostly used for underwater detection and mapping of submarine topography. It is very practical due to its flexible design according to detailed requirements. Because the structure of towed vehicle is complex, which has multiple units, it is difficult to estimate the wave resistance, especially considering the inner mutual interference of these units. So the model towing experiment is carried out based on the design of large scale composite towed vehicle, and according to the theory of computational fluid dynamics (CFD), the Star CCM commercial code combined with the discrete form of the Cartesian grid, the resistance of towed body above water surface is calculated. By comparing with experiment data, the accuracy of the numerical algorithm has been proved. Also, based on the calculation results along with design constraints, the towed body shape has been optimized. By the numerical algorithm, it turns out that the total resistance decreases by 25%.
composite towed vehicle; resistance optimization; configuration design; model experiment; numerical simulation
1000-8608(2017)04-0376-07
2016-10-10;
2017-03-20.
工业和信息化部高技术船舶科研计划资助项目(工信部联装[2014]498号);广东省科技计划项目(2015B090904010,2016B090918092);海洋可再生能源专项资金资助项目(QDME2013ZB01).
李雪剑(1992-),男,硕士生,E-mail:lxjlsws1992@mail.dlut.edu.cn;刘志军(1973-),男,高级工程师,E-mail:liuzhijun73@sina.com;刘 戈(1987-),男,博士生,E-mail:brant1987799@sina.com;林 焰*(1963-),男,教授,E-mail:linyanly@dlut.edu.cn.
U661.73
A
10.7511/dllgxb201704007
