基于功率管理的动力定位系统推力分配方法研究
2017-08-02张春来俞孟蕻
张春来,俞孟蕻,袁 伟
(江苏科技大学,电子信息学院,江苏 镇江 212003)
基于功率管理的动力定位系统推力分配方法研究
张春来,俞孟蕻,袁 伟
(江苏科技大学,电子信息学院,江苏 镇江 212003)
以全电力推进船舶为研究对象,针对船上其他用电设备的功耗波动对电力系统的影响这一实际情况,在不影响定位功能的前提下,在原有的推力分配基础上研究具有功率管理功能的推力分配策略,采用基于动态负载控制法的推力分配方法,以达到减小电网总功耗波动和提高船舶电力系统稳定性的目标。仿真验证此方法导致的船舶在速度和位置上的偏差被成功地限制在一定范围内,也证明了如此小的偏差足以实现减小电网功耗波动的目标。
动力定位系统;推力分配;功率管理;动态负载
0 引 言
由于经济的快速发展和陆地资源的日益紧缺,研究和利用海洋就有着十分重大的意义。而想充分开发和利用海洋资源,就必须依靠拥有先进技术和设备的船舶。凭借动力定位系统定位精度高、灵活性好、机动性强等优点,动力定位船舶的应用越来越广泛。推力分配以最优化推进系统能耗为目标,是动力定位控制系统的重要组成部分。合理的推力分配不但可以提升动力定位系统的相关性能,还能在减小误差、降低油耗和减小设备磨损等方面发挥积极作用。
船舶上,像绞车、起重机、钻井装置,重补偿器、泵、以及配电系统突发性的重新配置等都会引起船上耗能负载的波动,如果负载波动快于发电机反应速度,可能会导致全船失电、子系统瘫痪以及动力定位系统定位能力的减弱等问题。目前的功率管理系统[1]利用限载、减载、重配载等方法控制电力系统负载变化的方法越加成熟和完善,但这更多的是针对推进器负载大幅变化或者推力损失严重的情况,在船舶其他用电负载对电网的冲击和动力定位系统的影响上以及限载与定位功能同时实现上的研究较少。同时,在基于功率管理的推力分配技术方面,国内外对此的研究也较少。以往的推力分配只是为了减少推进器总的功率消耗,其能够限制推进负载,但是没有进行考虑其它的能够给电网产生大负载波动的负载。
针对其他负载的功耗波动问题,人们作出了许多尝试,采取了一些方法。如为了满足功率波动最大值需求,操作人员可能会强制启动更多的发电机组并网发电,使提供的可用功率大于实际需求的可用功率。还有的利用一个大的电池组在负载陡增或者停电期间,给推进装置和发电机以及其他需要的大功率设备提供电能[2]。Jones于2011年提出可以根据有关电机转矩的信息和来自动力定位系统的信号来控制可用功率,从而达到抵消负载波动的目的。Eirik Mathiesen等[3]提出动态负载预测法,即预测出即将发生的负载波动,并将其作为船舶发电机组控制器的前馈信号。Aleksander Veksler等[4]提出可采用合适的推力分配策略来协助功率管理,控制电力系统负载的变化,减小电网功率波动,实现推力系统与功率管理更加紧密的结合。由于推进系统仍然是绝大多数船上最大的耗能装置[5],所以可通过某种方式控制推进器使其在电网中的功耗产生可控制的波动,并以此波动来抵消船上其他设备的负载波动。有 2 种方法来控制功耗的变化:一种是实行推进器偏置法。由于利用推进器偏置不可避免地会增大功耗,本文不予考虑;另一种是通过允许产生的推力和要求的推力指令间存在一个偏差来控制推进器功耗。这种方法以其他设备的功耗波动为主,忽略了推进器的推力变化和功耗波动范围,并且这种方法的全程使用一定程度上会影响其他时间点的推力分配,降低了效率。本文在此思想的基础上,对这种方法做出一定的改进,提出一种新的分配方法,即动态负载控制法。
1 推力分配的原理
关于动力定位系统的推力分配问题方面,目前只考虑船舶在水平面上的运动,即纵荡、横荡和首摇 3个自由度运动。推力分配系统是动力定位系统的重要组成部分,用于产生力和力矩,来抗衡外部环境作用于船舶上的干扰力和力矩。推力分配需要满足 3 个等式,等式包括来自控制器所要求的纵向力、横向力和首摇力矩。
常规的推力分配策略如下:根据船舶的实际配置情况,不考虑功耗的波动因素,以功率消耗最小、磨损最小、推力变化平稳、推力误差最小、首向最优为要求,并满足控制器要求的横向、纵向推力及首摇力矩,建立优化目标函数及约束条件,实现对其的推力分配。推进器推力和其功率间非线性的关系为:
所以有:
目标函数
约束条件
式中:f为推进器的力向量;P为推进器功率;PC为功率因数;Q为权值矩阵;s为松弛变量;B为推力分配矩阵;τ为推力指令;fo为推进提推力上一时刻的值;fmax和fmin为推力的最大最小值;d为推进器推力变化率。
理想情况下,推力分配算法应当严格地实现控制指令τ的要求,意味着松弛变量s应该为 0,但是这个优化问题可能是无解的,这就要求s必须为非零,来确保约束条件下有可行域,同时设定权值矩阵Q1足够大,以达到当约束问题无解时,s有必要的小范围偏离零,当有解时,s为 0。第 2 项约束确保了推进器所产生的推力不能超过其最大值,第 3 项约束表示推力变化率的限制。
可以预计,由于常规的推力分配策略能够实现推力的平稳变化,所以也能使得推进系统功耗不会有剧烈的波动,但是若船上其他用电设备发生大的波动,那么电力网总的功耗也会随其发生大的波动,所以仅以功耗最优为目标的推力分配可能难以实现电力系统的稳定性。
2 基于动态负载控制法的推力分配策略
在原推力分配的约束里,加上速度限制、位置和功耗限制 3 个约束,并在原目标函数中加上推进系统功耗变化率与其他设备功耗变化率之差的目标函数,构成一个新的约束优化问题。动态负载控制法在短时间内偏离定位系统给出的推力指令下,借助船舶自身的重量和大惯性,紧紧控制引起的船舶在位置和速度上的偏差,做到足够小的偏差足以实现目标,即在不增加总体功耗的条件下,减小负载的变化。结构如图 1所示。

目标函数建立如下:
约束条件


3 针对动态负载控制法的约束条件的离散化处理
速度约束项属于一种积分约束,由于推力分配是以δt为单位的以及根据积分的累积性质,式(4)可以写成:
其中第 1 项,每进行 1 次分配就会得到 1 次累加,初始值为0。令
由于∆t内,系统状态恒定,被积项是定值,所以有
速度约束最终可写为
同理,对于位置约束项,可求得Te时刻的误差为:
4 仿真分析
以上所提出的算法都是理论的分析和设计,下面仿真验证算法的可行性和正确性。仿真对象选择为一艘采用电力推进的起重船,长115 m,宽26 m,吃水21 890 t,其拥有 4 个推进器,2 个全回转推进器作为主推,2 个隧道推进器,1 个在船首,1 个在船尾。具体参数如表 1所示。
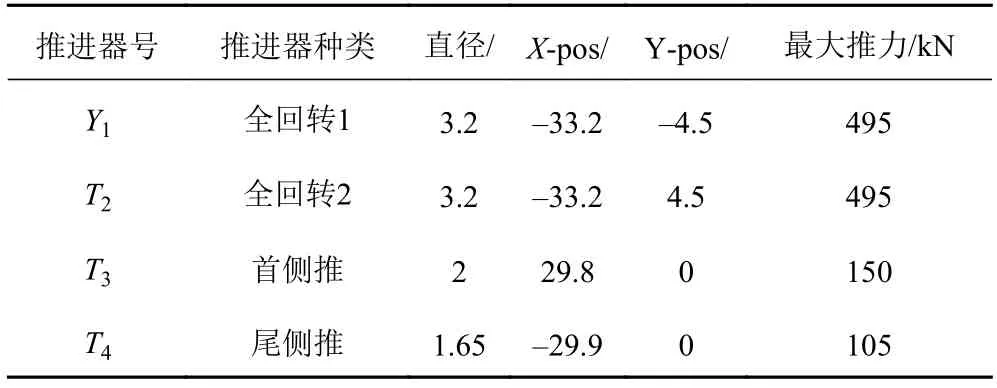
表 1 推进器参数Tab. 1 Parameters of propellers
仿真船处于动力定位模式,定位有独立的PID控制器实现。此算法不涉及角度不断变化的全回转推进器,试验时,2 个全回转推进器角度都设为0o或者180o。并且为了方便结果的对比和观察,假设推进器推力为 0 时,功率也为 0。
速度和位置误差的限定如下:
仿真开始时,对船加一个外部干扰(风浪流),模拟干扰信号为正弦波,进行定位。为了方便计算和观察,假设船上某设备以100 kW的功率在不停运行,但会周期性的突增200 kW,然后又回到常态。将提出的算法,即动态负载控制法应用在此推力分配上,来抵消该设备给总电网带来的功耗波动。
由图2可知,常规的推力分配可以保证推进系统的功率缓慢变化,但当其他设备功率产生大的波动时,整个电网的总功率也会产生巨大的波动。从图3可知,采用基于动态负载控制法的推力分配算法后,通过调整和控制推进系统的功耗波动,成功地抵消或减小了电网总功耗的波动,达到了目的。其中有的地方波动依然不小,这是因为此时推进系统功率很小,没有足够的可减量来抵消其他设备的功耗波动,如果需要改变这种情况,需要实行推进器偏置[6],但这会大大增加功耗。并且这种算法所带来的误差也被成功地限制在了要求的范围内。这种方法适用性比较强,对于增载、减载都能应对,适合其他设备负载波动是有规律的或者周期性的情况,并且船的质量越大,效果越好,但当推进系统功率较小时,补偿效果会差点,因为推进器可控的功率波动量有限。
5 结 语
所提出的推力分配算法凭借增大推进系统的功率波动和针对推力指令的偏差,成功减小了发电系统的负载波动。并且控制指令的偏差从船舶在速度和位置上的偏差方面被成功限制在可接受的范围内。当推力分配不被允许进行推进器偏置时,负载控制法能够最有效地减小负载波动。目前,该算法最需要继续的工作的是通过对总线频率、燃油消耗和排放的仿真去研究证明所提出的算法对电力系统的影响[7]。并且为了更好应用在实船上,该算法需要能够控制力的方向不断变化的推进器,比如全回转或者浆舵组合推进系统[8]。
[1]尚安利, 张达宽, 栾诚. 电力推进船舶功率管理系统综述[J].船电技术, 2011, 31(10): 1–5. SHANG An-li, ZHANG Da-kuan, LUAN Cheng. Summary of powert management system of electric power propulsion ship[J]. Marine Electric Technology, 2011, 31(10): 1–5.
[2]ALEKSANDER Veksler, TOR ARNE Johansen, ROGER skjetne. Transient power control in dynamic positioninggovernor feedforward and dynamic thrust allocation[Z]. Manoeuvring and Control of Marine Craft, 2012, 9th IFAC Conferenceon, 2012.
[3]EIRIK Mathiesen, MORTEN Breivik. Methods for reductions frequency and voltage variations on DP vessels[Z]. Dynamic Positioning Conference, 2012: 1–10.
[4]ALEKSANDER Veksler, TOR ARNE Johansen, ROGER Skjetne. Thrust Allocation with power management functionality on dynamically position vessels[Z]. In American Control Conference 2012: 1468–1475.
[5]RADAN D. Integrated control of marine mlectrical power systems[D]. PHD Thesis, NTNU, Trondheim, 2008.
[6]施小成, 魏玉石, 宁继鹏, 等. 基于能量最优的组合偏置推力分配算法研究[J]. 中国造船, 2012, 53(2): 96–104. SHI Xiao-cheng, WEI Yu-shi, NING Ji-peng, et al. Research on thrust allocation algorithm of combined offset based on energy optimization[J]. Chinese Shipbuilding, 2012, 53(2): 96–104.
[7]Christiaan De Wit. Optimal thrust allocation methods for dynamic positioning of ships[Z]. Delft University of Technology, Netherlands, July 2009. M. Sc Thesis.
[8]SERDALENM OJ. Optimal thrust allocation for marine vessels[Z]. Control Engineering Practice, 1997: 1223–1231.
Studies of the thrust allocation methods of dynamic positioning system based on power management
ZHANG Chun-lai, YU Meng-hong, YUAN Wei
(School of Electronic Information, Jiangsu University of Science and Technology, Zhenjiang 212003, China)
For the problem that power variation of other consumers on vessels causes serious impact on electric power system, under the premise of not affecting the positioning function, taking all electric propulsion vessels as the research object, this paper studies thrust allocation strategies with the function of power management based on original thrust allocation, and takes dynamic load control method to reduce total power fluctuation of power grid and improve the stability of electric power system. The simulation proves that the deviation on velocity and position of vessel caused by the way can be restricted to a certain extent successfully and such deviation can realize the target that reducing power fluctuation of power grid.
dynamic positioning system;thrust Allocation;power management;dynamic Load
U664.8
A
1672 – 7649(2017)07 – 0089 – 05
10.3404/j.issn.1672 – 7649.2017.07.018
2016 – 08 – 19;
2016 – 10 – 09
张春来(1991 – ),男,硕士研究生,研究方向为电力系统综合自动化。
