厘米级“北斗”相对定位的试验验证*
2017-07-18李明富
李明富,熊 杰,安 毅
(1.成都航空职业技术学院 科技处,成都 610100;2.中国西南电子技术研究所,成都 610036)
厘米级“北斗”相对定位的试验验证*
李明富**1,熊 杰2,安 毅2
(1.成都航空职业技术学院 科技处,成都 610100;2.中国西南电子技术研究所,成都 610036)
随着我国“北斗”卫星导航系统的发展,“北斗”精密相对定位的应用市场日益拓展。在动态对动态环境中,将基准站与移动站分别设在不同的车辆载体上,验证了“北斗”实时动态相对定位的精度。平台跑车和省道跑车结果显示水平相对定位误差和天向相对定位误差都在厘米级,表明“北斗”系统性能完全满足高精度应用的需求,能替代相应应用领域的全球定位系统(GPS)。
“北斗”系统;实时动态;精密相对定位;全球定位系统
1 引 言
“北斗”卫星导航系统(Beidou Navigation Satellite System,BDS)是继美国全球定位系统(Global Positioning System,GPS)与俄罗斯全球卫星导航系统(Global Navigation Satellite System,GLONASS)之后第三个投入使用的全球卫星导航系统。截至2016年底,“北斗”系统已成功发射23颗导航卫星,已初步具备覆盖亚太地区的高精度定位能力。目前,“北斗”系统正逐步在个人位置服务、气象应用、道路交通管理、铁路智能交通、航空运输、海运及水运、应急救助等民用领域发挥巨大的作用[1]。与此同时,“北斗”系统也越来越多地应用于国防建设领域,尤其是相对导航定位技术,已广泛应用于飞机和航母的编队出行、无人机协同作战等。由于“北斗”系统的军事功能与GPS系统类似,为保证武器装备在战时能正常发挥功能,推广“北斗”系统的使用具有重要意义。
卫星相对导航定位技术是指利用基准站和移动站的接收机测量数据计算两个天线之间的矢量。传统的差分方法基准站固定不动,差分数据覆盖范围有限,不能够满足如全自动精密着陆/舰、空中自主加油、飞行器交会对接等动态用户的应用需求[2-5]。
目前,关于动态对动态环境中的BDS相对定位性能还尚未见有系统的实测结果与分析。本文介绍了动基准站条件下的BDS载波相位实时动态(Real Time Kinematic,RTK)差分算法推导与实现,并以运动车辆作为基准站与移动站的载体,实验验证了在双动平台条件下不同运动场景中“北斗”系统的实时动态相对定位精度可以达到厘米级水平。
2 “北斗”RTK相对定位算法
2.1 基本算法
当基准站静止不动时,假设同时使用基准站和移动站的“北斗”双频观测量,则状态向量x定义如下[6]:

(1)


(2)
(3)



基于上述记号,状态空间模型中的观测向量y的定义如下:

(4)
其中:


为了应用标准Kalman滤波器,需将观测向量y线性化。记

那么状态空间模型的观测矩阵H(x)(即h(x)的偏导数)以及测量噪声协方差矩阵R的表达形式为

(5)

(6)
其中:





基于上述讨论,用于RTK相对定位的线性化状态空间模型为

(7)

利用上述线性化状态空间模型,结合标准Kalman滤波算法,可以估计出移动站坐标的浮点解与双差模糊度的浮点解。扩展卡尔曼滤波(Extended Kalman Filter,EKF)递推形式如下[8]:
(8)

模糊度浮点解由EKF估计后,再由最小二乘模糊度降相关平方差(LeastSquareAmbiguityDecorrelationAdjustment,LAMBDA)算法固定成整周解[9-10]。由于EKF递推求得的是单差模糊度浮点解,需将其转换成双差模糊度浮点解。转换关系如下:

(9)
其中:

LAMBDA算法及其扩展算法(MLAMBDA算法)能有效求解上述优化问题[11]。当参数Ratio大于给定阈值时,输出移动站坐标信息固定解,即

(10)
2.2 动基准站修正
当基准站与移动站均处于运动状态时,“北斗”RTK相对定位算法需采用动基准站模型[12]。此时,RTK相对定位算法可以计算得到移动站相对于基准站的位置。
在动基准站模型中,基准站的位置不是固定的,只能在各个历元通过单点定位技术获得。一旦已知基准站位置信息,移动站的位置就可以由短基线动态滤波算法获取,即由式(8)估计。这就意味着,移动站绝对位置的估计精度由基准站单点定位的精度决定,相对位置估计精度由动基准站模型决定。
为了改善上述算法的性能,需校正移动站与基准站之间的差分时间。一般地,移动站与基准站之间形成差分观测量的观测值是非时间同步的,通常要求这个时间差最大不超过2 ms。在快动平台,上述非时间同步偏差会引起严重的性能劣化。为了减小时间同步偏差的影响,需对基准站坐标进行校正,即
rb(tr)=rb(tb)+vb(tb)(tr-tb)。
式中:tr和tb表示由单点定位算法估计出的移动站采样时刻与基准站采样时刻,vb(tb)表示基准站的速度。
2.3 RTK解算流程
RTK定位解算除了利用EKF滤波估计基线向量的浮点解、LAMBDA算法搜索整周模糊度外,还涉及许多数据预处理,如基准站单点定位、载波周跳检查与修复等。在每个定位历元,详细的解算流程如下:
(1)选择滤波模型:基准是否移动;探测与修复周跳,剔除粗差观测值,获得一组“干净的”观测值[6]。用修复周跳、剔除粗差后的载波相位观测值进行基准站单点定位与EKF解算,求得基线向量及整周模糊度的初始解,其中的模糊度解为浮点实数。
(2)采用LAMBDA搜索算法及固定最小失败率Ratio检验方法,能够可靠地将实数模糊度固定为整数,若搜索得到的模糊度无法通过检验,则直接输出浮点解结果。
(3)将通过模糊度固定后的整周模糊度作为已知值代回式(10),从而获得固定解。
3 跑车试验配置
本次试验所使用的卫星导航接收机是NovAtel ProPak6,GNSS天线型号为THBD-301S,数传电台型号为Microhard N920f。此次试验中,基准站与移动站分别架设在处于运动状态下的车辆上。试验原理框图如图1所示。
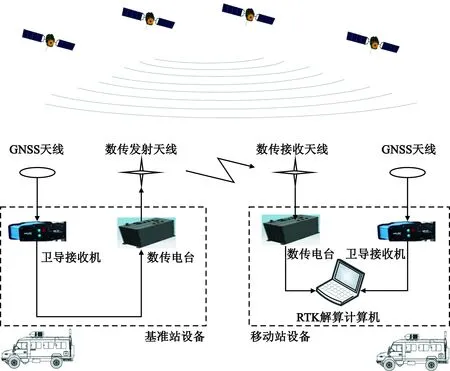
图1 跑车试验原理框图Fig.1 Sketch map of experimentation
BDS RTK解算设备设置在移动站平台。在每个定位历元,基准站与移动站分别接收卫导观测量,待基准站卫导观测量通过数传电台发送到移动站后,RTK软件执行第2节中描述的RTK相对定位算法,并显示相对定位结果。
此外,移动站还配置了NovAtel的后处理软件Waypoint GrafNav,其作用是利用基准站与移动站保存的卫星导航观测量数据后处理计算得出差分定位结果,并将此后处理结果作为参考基准,以评判“北斗”RTK相对定位算法的性能。具体做法如下:在每个历元,将RTK实时定位结果与后处理定位结果作差,统计东、北、天向基线距离误差标准差。误差标准差越小,定位效果越好。
4 试验结果与分析
本文通过以下几组试验,验证和分析了“北斗”系统实时动态相对定位的性能。
4.1 平台绕圈
该状态下,基准站与移动站车辆均以约10 km/h的时速绕着试验平台转圈,测试在双动平台下“北斗”RTK相对定位的精度。车辆运行轨迹如图2所示,东、北、天向随历元变化的定位曲线分别如图3、图4、图5的上子图所示。为验证“北斗”RTK相对定位算法的精度,在东、北、天向定位曲线图中分别给出后处理软件Waypoint GrafNav计算的定位结果,同时给出了以后处理结果为参考基准的“北斗”RTK相对定位误差曲线,分别如图3、图4、图5的下子图所示。

图2 平台跑车运行轨迹Fig.2 The experimentation trajectory on platform

图3 平台跑车东向定位曲线与误差曲线Fig.3 The positioning results and errors in east direction on platform

图4 平台跑车北向定位曲线与误差曲线Fig.4 The positioning results and errors in north direction on platform

图5 平台跑车天向定位曲线与误差曲线Fig.5 The positioning results and errors in vertical direction on platform
在每幅定位误差曲线上都标注了该方向上的误差标准差,其中东向定位误差标准差为0.0 020 716 m,北向定位误差标准差为0.0 023 056 m,天向定位误差标准差为0.0 065 194 m,各方向的定位误差标准差均属厘米级误差。
4.2 省道跑车
该状态下,基准站车辆在平台上以10 km/h的速度做绕圈运动,移动站车辆行驶在省道上,最高速度为50 km/h,平均速度为30 km/h,移动站运行轨迹如图6所示,东、北、天向随历元变化的定位曲线分别如图7、图8、图9的上子图所示。同时,在这些图中给出后处理定位曲线以及各个方向上的定位误差曲线,以验证“北斗”RTK相对定位定位精度,如图7~9的下子图所示。

图6 省道跑车运行轨迹Fig.6 The experimentation trajectory on provincial road

图7 省道跑车东向定位曲线与误差曲线Fig.7 The positioning results and errors in east direction on provincial road
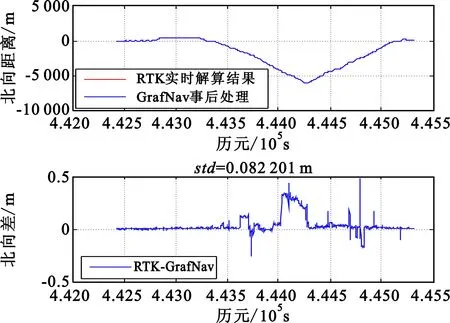
图8 省道跑车北向定位曲线与误差曲线Fig.8 The positioning results and errors in north direction on provincial road

图9 省道跑车天向定位曲线与误差曲线Fig.9 The positioning results and errors in vertical direction on provincial road
统计结果表明,东向定位误差标准差为0.023 257 m,北向定位误差标准差为0.082 201 m,天向定位误差标准差为0.089 006 m,各方向的定位误差标准差均达到厘米级水平。
5 结 论
本文首先介绍了动基准站条件下的BDS RTK算法与实现,解决了定基准站RTK算法的缺陷;之后分别将基准站与移动站设置在不同运动车辆上,实验测试了双动平台(基准站与移动站)条件下多场景中的“北斗”系统实时动态相对定位的性能。试验结果表明,无论是平台跑车还是省道跑车,“北斗”系统实时动态定位在东、北、天向的误差标准差均在厘米级水平,表明“北斗”系统具备高精度定位的能力,能支持高精度用户的需求,有能力代替现有特殊应用场合下装备的GPS设备。
[1] 陈向东.“北斗”民用前景分析[J].卫星与网络,2011(5):32-34. CHEN Xiangdong. Beidou civilian market prospect analysis[J].Satellite & Network,2011(5):32-34.(in Chinese)
[2] 董新民,徐跃鉴,陈博.自动空中加油技术研究进展与关键问题[J].空军工程大学学报(自然科学版),2008,9(6):1-5. DONG Xinmin,XU Yuejian,CHEN Bo. Progress and challenges in automatic aerial refueling[J].Journal of Air Force Engineering University(Natural Science Edition),2008,9(6):1-5.(in Chinese)
[3] 任小伟,熊帅,杨文辉. 卫星导航相对定位技术研究[J].全球定位系统,2014,39(2):54-59. REN Xiaowei,XIONG Shuai,YANG Wenhui. Investigation on satellite navigation relative positioning technology[J].GNSS World of China,2014,39(2):54-59.(in Chinese)
[4] 汪捷,徐冠楠. 基于GNSS动动差分相对定位方法的研究与探讨[J].现代导航,2015(3):250-256. WANG Jie,XU Guannan. Move difference relative positioning method based on GNSS[J].Modern Navigation,2015(3): 210-256.(in Chinese)
[5] 李豹,王飞,朱银兵,等. GNSS不同定位模式性能比较与分析[J].舰船电子工程,2013,33(6):68-71. LI Bao,WANG Fei,ZHU Yinbing,et al.Comparison and analysis on performances of different GNSS positioning
modes[J].Ship Electronic Engineering,2013,33(6):68-71.(in Chinese)
[6] BOUCHER C,NOYER J C. A hybrid particle approach for GNSS applications with partial GPS outages[J].IEEE Transactions on Instrumentation and Measurement,2010,59(3):498-505.
[7] KAPLAN E D,HEGARTY CJ.Understanding GPS: principles and applications[M].Norwood,MA:Artech House,1996.
[8] KAILATH T,SAYED A H,HASSIBI B. Linear estimation[M].Upper Saddle River,NJ: Prentice-Hall,2000.
[9] TEUNISSEN P J G. The least-square ambiguity decorrelation adjustment: a method for fast GPS ambiguity estimation[J].Journal of Geodesy,1995,70(1):65-82.
[10] 任小伟. 载波相位差分相对定位的模糊度求解[J].导航定位学报,2014,2(1):20-22. REN Xiaowei. Ambiguity resolution on the carrier phase differential relative positioning[J].Journal of Navigation and Positioning,2014,2(1):20-22.(in Chinese)
[11] CHANG X W,YANG X,ZHOU T. MLAMBDA: a modified LAMBDA method for integer least-squares estimation[J].Journal of Geodesy,2005,79(9):552-565.
[12] 宋超,关劲,李豹. 动态对动态差分相对定位方法建模与测试[J].舰船电子工程,2015,35(2):70-73. SONG Chao,GUAN Jin,LI Bao. Modeling and test on relative positioning to a moving reference[J].Ship Electronic Engineering,2015,35(2):70-73.(in Chinese)
Experimental Demonstration of Centimeter-level BDS Relative Positioning
LI Mingfu1,XIONG Jie2,AN Yi2
(1.Science and Technology Department,Chengdu Aeronautic Vocational and Technical College,Chengdu 610100,China;2.Southwest China Institute of Electronic Technology,Chengdu 610036,China)
With the development of Beidou navigation satellite system(BDS),the BDS precise relative positioning will have a good application prospect.By setting the base station and the rover station in different moving cars,the accuracy of BDS real time dynamic relative positioning is verified. Test results show that,on both open platform and provincial road,the standard deviation of relative positioning error is within the centimeter both in horizontal and vertical directions. The results indicate the BDS meets the needs of high-accuracy relative positioning and can replace the global positioning system(GPS) in corresponding fields.
Beidou navigation satellite system(BDS);real time kinematic(RTK);precise relative positioning;global positioning system(GPS)
10.3969/j.issn.1001-893x.2017.07.004
李明富,熊杰,安毅.厘米级“北斗”相对定位的试验验证[J].电讯技术,2017,57(7):756-761.[LI Mingfu,XIONG Jie,AN Yi.Experimental demonstration of centimeter-level BDS relative positioning[J].Telecommunication Engineering,2017,57(7):756-761.]
2017-01-11;
2017-04-14 Received date:2017-01-11;Revised date:2017-04-14
四川省科技厅人工智能重点实验室开发基金项目(2012RYJ07)
TN96
A
1001-893X(2017)07-0756-06

李明富(1978—),男,四川资阳人,2007年获工学硕士学位,现为副教授,主要从事通信、导航、软件无线电等技术研究;
Email:123274151@qq.com
熊 杰(1984—),男,四川邛崃人,2014年获博士学位,现为工程师,主要研究方向为导航与自适应滤波等;
Email: xiongji_1209@163.com
安 毅(1983—),男,云南楚雄人,2015年获博士学位,现为工程师,主要从事导航、信号处理等技术研究。
Email: mranyi@163.com
**通信作者:123274151@qq.com Corresponding author:123274151@qq.com
