视觉测量误差对空间机械臂捕获目标卫星控制精度的影响分析
2017-07-18王兴龙周志成曲广吉
王兴龙 周志成 曲广吉
(中国空间技术研究院通信卫星事业部,北京 100094)
视觉测量误差对空间机械臂捕获目标卫星控制精度的影响分析
王兴龙 周志成 曲广吉
(中国空间技术研究院通信卫星事业部,北京 100094)
空间机械臂通过视觉伺服测量其末端与目标卫星之间的相对位置和姿态信息,以此规划和控制关节运动轨迹,完成捕获操作。文章分析了视觉测量误差对空间机械臂捕获目标卫星控制精度的影响。首先,建立视觉伺服系统的测量误差模型。然后,根据目标卫星捕获控制算法推导了测量误差到单步和最终控制误差的传递模型。最后,通过工程算例仿真,计算分析了不同测量误差对应的相对位置、姿态、线速度和角速度的控制精度,给出了指定控制精度所允许的最大测量误差范围。文章研究结果可为空间机械臂的测量和控制精度指标设计提供参考。
空间机械臂;目标卫星捕获;视觉测量误差;控制精度
1 引言
空间机械臂动力学与控制技术[1-2]是航天器在轨服务体系的核心技术之一。服务卫星通过空间机械臂完成对目标卫星的捕获连接[3],在此基础上进一步实施故障修复等在轨服务操作。为减小目标卫星捕获瞬时的碰撞冲击,要求实时规划和控制空间机械臂的运动轨迹,实现机械臂末端对目标卫星捕获接口的相对位置姿态同步跟踪。对于自主控制方式[4],空间机械臂通过视觉伺服实时采集目标卫星图像信息,输入其控制系统形成闭环反馈控制,因而视觉测量误差对空间机械臂捕获目标卫星的控制精度具有重要影响。
目前,国内外在空间机械臂视觉伺服和目标卫星捕获控制方面已有较多研究。文献[5-6]中讨论了基于位置和基于图像的2种视觉伺服系统,给出了各自的图像解算方法和优缺点比较。文献[7-8]中推导了空间机械臂运动学和动力学方程,文献[9-12]中研究了空间机械臂捕获目标卫星的轨迹规划和控制方法。在视觉测量误差对空间机械臂控制精度的影响方面,国内外研究工作则相对较少。文献[13-14]中对视觉测量误差进行了理论建模与分析,但没有与控制系统结合研究,缺少测量误差到控制误差的传递影响分析。
本文从工程角度出发,研究视觉测量误差对空间机械臂捕获目标卫星控制精度的影响,建立视觉测量误差模型和误差传递模型。通过工程算例仿真,定量分析测量误差对控制精度的影响,给出指定控制精度所允许的最大测量误差范围,为空间机械臂测量和控制精度指标设计提供参考。
2 视觉测量误差模型


图1 空间机械臂捕获目标卫星示意Fig.1 Illustration of space manipulator for capturing a target satellite

图2 空间机械臂捕获目标卫星整体控制结构框图Fig.2 Control scheme diagram of space manipulator for capturing a target satellite
从图2可以看出,视觉伺服作为整个规划和控制系统的输入,其测量误差对空间机械臂捕获目标卫星的控制精度具有重要影响。定义δr,δe分别为相对位置和相对姿态的测量误差,则
(1)

定义Δr,Δe分别为相对位置和相对姿态的测量误差限,即
(2)
定义R为空间机械臂视觉相机与目标卫星靶标之间的相对距离。根据视觉伺服系统特点,Δr,Δe与R成正比。定义δr,0,δe,0分别为单位距离处(R=1 m)的相对位置和相对姿态测量误差限,则任意距离R处的测量误差限为
(3)
式中:Rmin为空间机械臂捕获目标卫星时,视觉相机与靶标之间的最小距离,与视觉相机和靶标的安装位置有关。
假设δr~N(0,σr2),δe~N(0,σe2)分别为均值为零的高斯白噪声,其中σr,σe分别为相对位置和相对姿态误差噪声的标准差。Δr,Δe分别取δr,δe的3σ值,则有σr=Δr/3,σe=Δe/3。
3 测量误差到控制误差的传递模型
3.1 测量误差到单步控制误差的传递模型
根据空间机械臂捕获目标卫星规划控制算法[9],机械臂末端对目标卫星捕获接口的相对线速度v和相对角速度ω与相对位置姿态的传递关系为
(4)
式中:Kv,Kω分别为线速度和角速度增益矩阵,一般为正对角阵;a为用轴角法表示的机械臂末端对目标卫星捕获接口的相对姿态,见式(5)。
(5)
考虑工程实际情况,空间机械臂捕获目标卫星过程中的规划与控制都是实时的。每个测量周期内,视觉伺服系统都会对r,e进行测量更新,并以此重新规划和控制当前周期的v,ω,相当于截断了之前所有周期测量误差的累积影响,因此从测量误差到控制误差的传递关系是单步形式的。
设视觉伺服系统测量周期为T,变量后添加(k)表示变量在第k周期的取值。由式(4)可知,空间机械臂线速度和角速度的规划控制通道是解耦的,因而有
(6)
式中:S(k)见式(7)。
(7)
式中:sβ=sinβ(k);sγ=sinγ(k);cβ=cosβ(k);cγ=cosγ(k)。
定义εr,εe,εv,εω分别为相对位置、姿态、线速度和角速度的单步控制误差,即
(8)
式中:rd,ed,vd,ωd分别为相对位置、姿态、线速度和角速度的期望值;εx,εy,εz为εr在惯性坐标系中的分量;εα,εβ,εγ为εe在惯性坐标系中的分量;εv,x,εv,y,εv,z为εv在惯性坐标系中的分量;εω,x,εω,y,εω,z为εω在惯性坐标系中的分量。
将式(1)和式(8)代入式(6),进行线性化处理并忽略高阶小量,推导得到测量误差对单步控制误差的传递方程为
(9)
式中:P(k)和Q(k)见式(10)和式(11)。
(10)
(11)
式中:sα=sinα(k);cα=cosα(k);sα+γ=sin(α(k)+γ(k));cα+γ=cos(α(k)+γ(k))。
3.2 测量误差到最终控制误差的传递模型
空间机械臂捕获目标卫星规划控制的最终目的是实现机械臂末端对目标卫星捕获接口的相对位置姿态同步跟踪,以减小捕获时的碰撞冲击。最终捕获时刻tf的r(tf),e(tf),v(tf),ω(tf)反映了空间机械臂捕获目标卫星的最终控制精度。定义r,v,ω的3轴合成误差和e的单轴极限误差分别为其最终控制精度评价指标:εnor(r)=‖r‖2,εnor(v)=‖v‖2,εnor(e)=‖e‖∞,εnor(ω)=‖ω‖2。其中,‖·‖∞和‖·‖2分别为向量的∞-范数和2-范数。视觉测量误差δr,δe与最终控制误差εnor(r),εnor(v),εnor(e),εnor(ω)之间并无显式的传递关系,其影响需通过整个捕获过程的规划控制仿真分析得到。
4 测量误差对控制精度影响分析
4.1 工程算例
以具体工程算例进行仿真,分析视觉测量误差对空间机械臂捕获目标卫星控制精度的影响。服务卫星和目标卫星设定采用成熟型号卫星平台,星本体坐标系OsXsYsZs和OtXtYtZt定义如图1所示。空间机械臂设定为7自由度刚性机械臂,整体构型与“国际空间站”遥控机械臂系统(SSRMS)类似。机械臂坐标系采用传统D-H建模方法,如图3所示。其中:臂杆i坐标系{i}的轴zi沿关节i+1轴线方向;原点oi位于轴zi-1和轴zi的公垂线与轴zi的交点;轴xi沿轴zi-1和轴zi的公垂线方向,由关节i指向关节i+1。机械臂D-H参数如表1所示。其中:θi为轴xi-1与轴xi之间的夹角,绕轴zi-1逆时针转动为正;αi为轴zi-1与轴zi之间的夹角,绕轴xi逆时针转动为正;ai为轴zi-1与轴zi之间的距离;di为轴xi-1与轴xi之间的距离[15]。机械臂动力学参数如表2所示。

图3 7自由度空间机械臂D-H坐标系Fig.3 D-H frames of 7-dof space manipulator

表1 空间机械臂D-H参数

表2 空间机械臂动力学参数

4.2 测量误差对单步控制精度影响分析
令单位距离处(R=1 m)的相对位置和相对姿态测量误差限分别为δr,0=0.1 m和δe,0=1.0°。根据本文建立的视觉测量误差模型,在MATLAB软件中生成标准差随距离变化的高斯噪声,模拟相对位置和相对姿态测量误差δr,δe,并将其叠加到视觉伺服系统测量输出的相对位置和相对姿态r,e上,进行空间机械臂捕获目标卫星规划控制仿真。仿真过程中实时计算输出相对位置、姿态、线速度和角速度的单步控制误差εr,εe,εv,εω,用以分析验证本文推导的单步误差传递模型。
仿真得到的相对位置测量误差δr和相对姿态测量误差δe各坐标分量分别如图4(a)和图4(b)所示。从图4中可以看出,由于目标卫星捕获过程中相对距离R随时间递减,因而δr和δe也随时间递减,在捕获时刻t=16~18 s,δr和δe的误差范围分别不超过0.01m和0.1°,符合工程实际情况。
仿真得到的相对位置单步控制误差εr和相对姿态单步控制误差εe各坐标分量分别如图5(a)和图5(b)所示,相对线速度单步控制误差εv和相对角速度单步控制误差εω分别如图6(a)和图6(b)所示。可以看出,εr和εe分别与δr和δe同量级,且都随时间同步递减。这是因为测量周期较短(T=0.1 s),εv和εω的时间积分效果不明显,符合单步误差传递模型式(9)。εv和εω量级明显小于δr和δe,且εv各分量数值范围基本相等,εω各分量数值范围相差较大,符合单步误差传递模型式(9)。

图4 相对位置和姿态测量误差Fig.4 Measurement errors of relative position and attitude

图5 相对位置和姿态单步控制误差Fig.5 One-step control errors of relative position and attitude
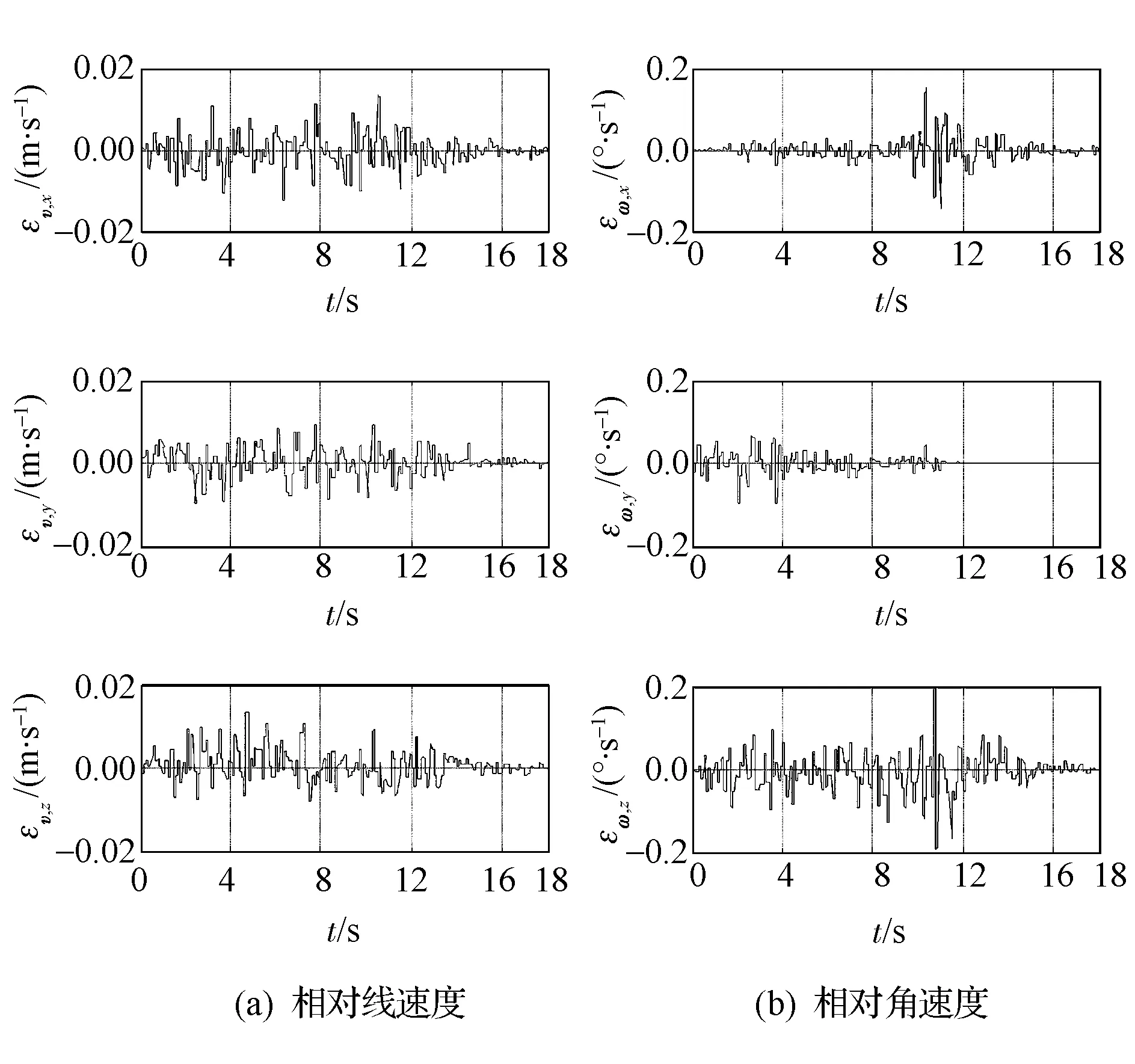
图6 相对线速度和角速度单步控制误差Fig.6 One-step control errors of relative linear velocity and angular velocity
4.3 测量误差对最终控制精度影响分析
由第3.1节推导过程可知,速度增益矩阵Kv,Kω为对角阵,空间机械臂位置和姿态的规划控制通道是解耦的,相对位置测量误差δr仅影响相对位置r控制精度和相对线速度v控制精度。令单位距离处(R=1 m)的相对位置测量误差限δr,0分别为0.00m,0.04m,0.06m,0.08m,进行空间机械臂捕获目标卫星规划控制仿真,计算输出相对位置最终控制误差εnor(r)和相对线速度最终控制误差εnor(v),仿真结果分别如图7和图8所示。其中,捕获时刻t=16~18 s时的数值范围在图中放大显示。从图7和图8中可以看出,捕获时刻t=16~18 s时的εnor(r)和εnor(v)随δr,0增大而增大。本文算例中,在不考虑其他误差情况下,当最终控制精度指标要求εnor(r)≤0.01 m,εnor(v)≤0.002 m·s-1时,允许的最大相对位置测量误差限δr,0≤0.08 m (R=1 m)。
空间机械臂相对姿态测量误差δe仅影响相对姿态e控制精度和相对角速度ω控制精度。令单位距离处(R=1 m)的相对姿态测量误差限δe,0分别为0.0°,0.5°,1.0°,1.5°,进行空间机械臂捕获目标卫星规划控制仿真,计算输出相对姿态最终控制误差εnor(e)和相对角速度最终控制误差εnor(ω),仿真结果分别如图9和图10所示。其中,捕获时刻t=16~18 s时的数值范围在图中放大显示。从图9和图10中可以看出,捕获时刻t=16~18 s时的εnor(e)和εnor(ω)随δe,0增大而增大。本文算例中,在不考虑其他误差情况下,当最终控制精度指标要求εnor(e)≤0.2°,εnor(ω)≤0.04(°)·s-1时,允许的最大相对姿态测量误差限δe,0≤1.5° (R=1 m)。

图7 测量误差对相对位置最终控制精度影响Fig.7 Influence of measurement error on relative position final control precision

图8 测量误差对相对线速度最终控制精度影响Fig.8 Influence of measurement error on relative linear velocity final control precision

图9 测量误差对相对姿态最终控制精度影响Fig.9 Influence of measurement error on relative attitude final control precision

图10 测量误差对相对角速度最终控制精度影响Fig.10 Influence of measurement error on relative angular velocity final control precision
仿真结果表明,空间机械臂捕获目标卫星的最终控制误差随视觉测量误差增大而增大。采用本文仿真分析方法,可定量得到测量误差与控制精度之间的对应关系,以便为空间机械臂测量和控制精度指标设计提供参考。
5 结论
本文从工程角度出发,建立了视觉测量误差模型和误差传递模型,通过数值仿真定量分析了视觉测量误差对空间机械臂捕获目标卫星控制精度的影响,主要得出了以下结论。
(1)视觉测量误差对空间机械臂位置和姿态控制精度的影响是解耦的,相对位置测量误差δr仅影响相对位置r控制精度和相对线速度v控制精度,相对姿态测量误差δe仅影响相对姿态e控制精度和相对角速度ω控制精度。
(2)空间机械臂捕获目标卫星的最终控制误差随视觉测量误差增大而增大。本文算例中,在不考虑其他误差情况下,指定相对位置、姿态、线速度和角速度的控制精度要求分别为εnor(r)≤0.01 m,εnor(e)≤0.2°,εnor(v)≤0.002 m·s-1,εnor(ω)≤0.04(°)·s-1时,允许的最大相对位置和相对姿态测量误差限分别为δr,0≤0.08 m和δe,0≤1.5° (R=1 m)。本文研究结果可为空间机械臂测量和控制精度指标设计提供参考。
)
[1]周志成, 曲广吉. 通信卫星总体设计和动力学分析[M]. 北京: 中国科学技术出版社, 2012
ZhouZhicheng,QuGuangji.Systemdesignanddyna-micsanalysisofcommunicationsatellites[M].Beijing:ChinaScienceandTechnologyPress, 2012 (inChinese)
[2]于登云, 孙京, 马兴瑞. 空间机械臂技术及发展建议[J]. 航天器工程, 2007, 16(4): 1-8
YuDengyun,SunJing,MaXingrui.SuggestionondevelopmentofChinesespacemanipulatortechnology[J].SpacecraftEngineering, 2007, 16(4): 1-8 (inChinese)
[3]李新刚, 裴胜伟. 国内外航天器在轨捕获技术综述[J]. 航天器工程, 2013, 22(1): 113-119
LiXingang,PeiShengwei.On-orbitcapturetechnologyofspacecraft[J].SpacecraftEngineering, 2013, 22(1): 113-119 (inChinese)
[4]李大明, 饶炜, 胡成威, 等. 空间站机械臂关键技术研究[J]. 载人航天, 2014, 20(3): 238-242
LiDaming,RaoWei,HuChengwei,etal.Keytechnologyreviewoftheresearchonthespacestationmanipulator[J].MannedSpaceflight, 2014, 20(3): 238-242 (inChinese)
[5]InabaN,OdaM,HayashiM.Visualservoingofspacerobotforautonomoussatellitecapture[J].JapanSocietyofAeronauticalSpaceSciencesTransactions, 2004, 46(153): 173-179
[6]ConticelliF,AllottaB.Nonlinearcontrollabilityandstabilityanalysisofadaptiveimage-basedsystems[J].IEEETransactionsonRoboticsandAutomation, 2001, 17(2): 208-214
[7]UmetaniY,YoshidaK.Resolvedmotionratecontrolofspacemanipulatorswithgeneralizedjacobianmatrix[J].IEEETransactionsonRoboticsandAutomation, 1989, 5(3): 303-314
[8]曲广吉. 航天器动力学工程[M]. 北京: 中国科学技术出版社, 2000
QuGuangji.Spacecraftdynamicsengineering[M].Beijing:ChinaScienceandTechnologyPress, 2000 (inChinese)
[9]徐文福. 空间机器人目标捕获的路径规划与实验研究[D]. 哈尔滨: 哈尔滨工业大学, 2007
XuWenfu.Pathplanningandexperimentstudyofspacerobotfortargetcapturing[D].Harbin:HarbinInstituteofTechnology, 2007 (inChinese)
[10]ShibliM,SuCY,AghiliF.Adaptiveinversedyna-micscontrolofafree-flyingspacerobotincontactwithatargetsatellite:aHubblespacetelescopecase[C]//ProceedingsofCanadianConferenceonElectricalandComputerEngineering.NewYork:IEEE, 2006: 1275-1278
[11]刘金琨. 滑模变结构控制MATLAB仿真: 先进控制系统设计方法[M]. 北京: 清华大学出版社, 2015
LiuJinkun.SlidingmodecontroldesignandMATLABsimulation:thedesignmethodofadvancedcontrolsystem[M].Beijing:TsinghuaUniversityPress, 2015 (inChinese)
[12]黄剑斌, 李志. 基于阻抗控制的空间机械臂接触控制与轨迹规划技术[J]. 航天器工程, 2013, 22(4): 43-48
HuangJianbin,LiZhi.Spacemanipulatorinteractioncontrolandtrajectorygenerationbasedoncartesianimpedancecontrol[J].SpacecraftEngineering, 2013, 22(4): 43-48 (inChinese)
[13]KimWS,AnsarAL,SteeleRD,etal.Performanceanalysisandvalidationofastereovisionsystem[C]//ProceedingsofIEEEInternationalConferenceonSystems,ManandCybernetics.NewYork:IEEE, 2005: 1409-1416
[14]张鹏炜, 张智诠, 胡磊, 等. 基于针孔模型的双目视觉标定误差仿真分析[J]. 电光与控制, 2009, 16(12): 65-69
ZhangPengwei,ZhangZhiquan,HuLei,etal.Calibrationerrorsimulatinganalysisofbinocularvisionbasedonpinholecameramodel[J].ElectronicsOpticsandControl, 2009, 16(12): 65-69 (inChinese)
[15]蔡自兴,谢斌.机器人学[M].北京:清华大学出版社,2015
CaiZixing,XieBin.Robotics[M].Beijing:TsinghuaUniversityPress, 2015 (inChinese)
(编辑:夏光)
Influence Analysis of Visual Measurement Errors on Space Manipulator Control Precision for Capturing a Target Satellite
WANG Xinglong ZHOU Zhicheng QU Guangji
(Institute of Telecommunication Satellite, China Academy of Space Technology, Beijing 100094, China)
Space manipulator uses visual servo to measure the relative position and attitude information between its end effector and the target satellite, so as to plan and control its joint motion trajectories to complete the capturing operation. This paper focuses on the influence analysis of visual measurement errors on space manipulator control precision for capturing the target satellite. The measurement error model of visual servo system is established, then, the transfer models from measurement errors to one-step and final control errors are derived on the basis of target satellite capturing control algorithm. The control precision of relative position, attitude, linear velocity and angular velocity corresponding to different measurement errors is calculated by numerical simulations. The maximal measurement errors permitted by the given control precision are presented as conclusions. The results of this paper can provide references for the measurement and control precision design of the space manipulator.
space manipulator; target satellite capturing; visual measurement error; control precision
2017-04-28;
2017-05-22
国家自然科学基金(11272334)
王兴龙,男,博士研究生,研究方向为航天器总体设计、航天器动力学与控制。Email:wangxinglong1987@163.com。
TP241.3
A
10.3969/j.issn.1673-8748.2017.03.005
