可见光室内定位系统的信道模型及其仿真分析
2017-06-14卢洪斌梁祚铨
卢洪斌+梁祚铨

摘要:为掌握可见光室内定位系统的无线信道特征,以提高室内定位系统的抗干扰性能,建立了室内可见光定位系统信号传输的信道模型及噪声模型。在设计的照明模型下,可见光反射损耗远大于视距传播的损耗,故信道传输函数可用直流增益函数表示。仿真结果表明,定位接收器接收到的定位信号信噪比大小与照明灯分布、定位光源光功率变化以及室内定位平面相对高度等参数有关。仿真计算结果表明,不同位置的光源所发信号接收时信噪比差异明显,因此定位中对定位光源的选择很重要,会直接影响定位系统的抗干扰性能,从而影响系统的定位精度。
关键词: 可见光; 室内定位; 信道; 信噪比
中图分类号: TN 929.12 文献标志码: A doi: 10.3969/j.issn.1005-5630.2017.02.012
文章編号: 1005-5630(2017)02-0064-06
引 言
以全球定位系统(GPS)为代表的无线定位技术通常的定位精度为1~5 m,远远不能满足室内定位实际应用的精度要求。可见光室内定位具有较高的定位精度,其定位精度理论上可以达到厘米数量级,是智能机器人、工业智能化等与定位相关应用可选的技术手段。此外,基于LED绿色照明光源的可见光定位方法还具有室内覆盖范围广、节能、安全、布设简单、成本低、电磁兼容性好等突出优点。
可见光室内定位系统近年有一些研究结果[1-3],但与定位有关的信道特性还缺乏针对性的研究,而实际定位精度的高低会受到信道物理特性及噪声的影响,这是因为在室内环境下信号发光强度波动、人和物的移动对信号光的遮挡、光背景噪声等都会限制定位系统的稳定性和定位精度。因此开展这方面的研究对于指导室内高精度定位系统的设计有重要的价值。
本文建立了基于室内可见光定位系统信号传输的信道模型及噪声模型,通过仿真分析得出照明灯分布、光功率波动以及室内定位平面相对高度变化等对接收定位信号质量的影响程度,这些定量结果对于指导室内定位系统设计具有一定的参考价值。
1 可见光LED室内照明模型
图1为室内LED照明灯分布平面图,每行和每列相邻的照明灯间距为常数a,随着室内空间的增大,照明灯行列数可相应增加。已有研究结果表明,在一定条件下室内LED照明系统反射耗损较大[4],可忽略不计,因此仅考虑光视距传播(LOS)的情况。
图1中每个照明灯都由唯一的ID号标识,并有确定的位置坐标,设定位接收器距照明灯分布平面垂直距离为h。
2 室内可见光视距传播信道模型及测距方法
根据前述的室内可见光照模型,视距传播下的LED灯和接收器的位置关系如图2所示,信道的传输函数可用直流增益函数表示[5]:
式中:A为光电二极管(PD)接收面积;ψ为接收器轴线与入射光的夹角;Ts(ψ)为接收器光滤波增益,g(ψ)为接收器光学透镜会聚信号增益,将Ts(ψ)g(ψ)视为常数c;ψc为视场半角宽度;为LED灯垂直轴线与发射光的夹角;r为LED灯与接收器的距离;m是朗伯阶数,m=-ln 2/ln(cos1/2),1/2为LED灯半功率角。
由于接收信号强度(RSS)测距法在定位技术中得到了广泛使用,本文分析中采用这种测距方法。LED灯与接收器的距离可通过测量发光强度和接收信号强度并根据式(1),(2)得出:
接收器可同时接收到多个LED灯所发出的定位信号,通过码分多址技术可在接收端分离出不同LED灯所属信号,根据解调出的每个LED灯信号的强度来确定Pr的大小,从而确定rn值。接收端的光电二极管探测到的光电流可表示为I=γPr,γ为光电转换效率,则式(6)变为
式中α为RSS测距中因测距参数变为电流I而引入的常数。
3 噪声模型
接收信号的噪声分析表明热噪声和背景辐射产生的散弹噪声占主导地位,其他噪声的影响较小[4-9],故本文只考虑这两种噪声的影响。
式中:k为波尔兹曼常数;T为热力学温度;G为开环电压增益;η为光电二极管单位面积的固定电容;β为等价噪声带宽;Γ为噪声因子;gm为跨导;I2 、I3为噪声带宽因子。
背景辐射产生的散弹噪声为
4 定位信号信噪比分析
定位时一般至少需要接收3个LED灯所发出的定位信息,代入3个以上的方程方可计算出待测点的坐标。实际接收器一般能接收到远多于3个LED灯所发的信号,可以选择信噪比大的接收信号作为定位信号源,从而提高定位精度。考虑到接收器视场半角宽度ψc的大小对接收到LED灯数目的限制,计算得到在间隔为a的LED灯分布的单一方向上接收器能接收到的LED灯数目有比较大的差异,最少可接收到3个LED灯所发信标信号,最多可接收到17个LED灯所发信标信号,由于定位只需3个信标信号,故有必要选择信噪比最优的信号,以提高接收定位信号的可靠性。计算条件为:ψc=70°,灯距a分别为0.5,1,1.5,2 m,h分别为2,2.5,3 m。
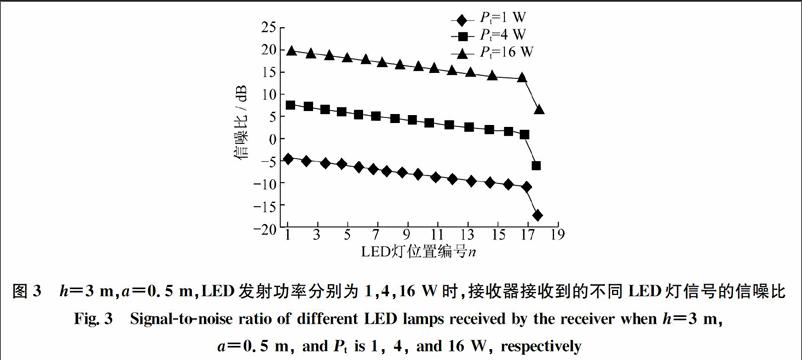
通过前述信道模型和噪声模型计算得到不同条件下接收信号的信噪比变化曲线。图3为h=3 m,a=0.5 m,不同LED发射功率下接收到的不同LED信号的信噪比。由图3可见,LED发光功率Pt越大,接收到的信号信噪比越大;相同条件下,接收器与接收到的信号所属LED距离越远,信号信噪比越小,不在视场范围内的LED的信号信噪比急剧下降。
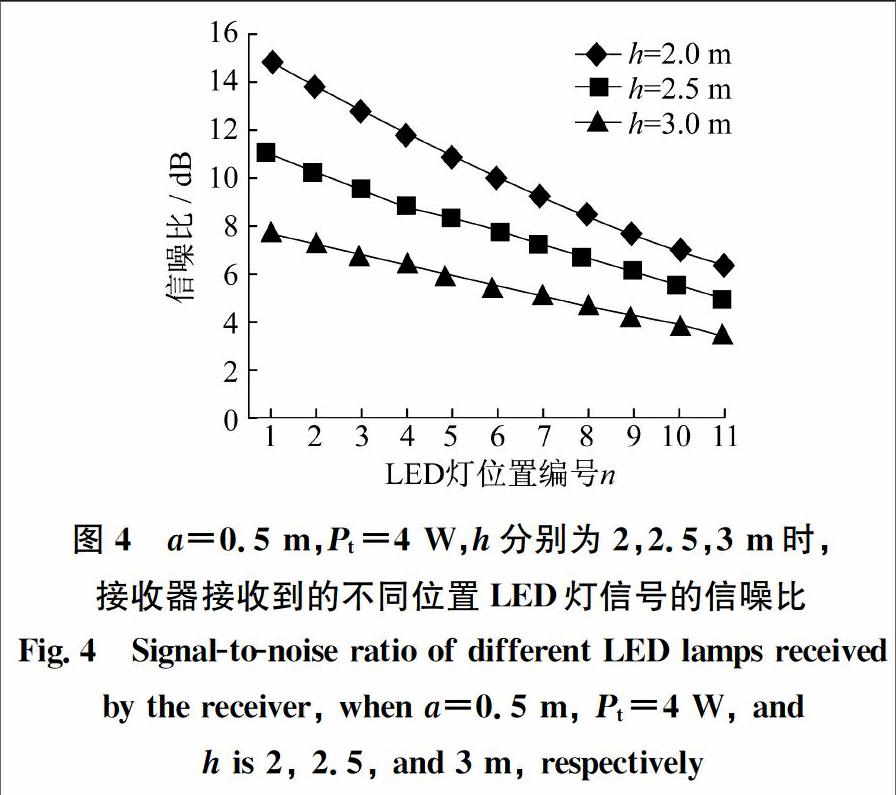
图4为a=0.5 m,Pt=4 W,接收器距LED灯分布平面不同高度时,所接收到的不同LED信号的信噪比。图5为a=1.5 m,Pt=4 W,接收器距LED灯分布平面不同高度时,所接收到的不同LED信号的信噪比。从图4、图5可看出,h越大所接收到的信号质量越差,计算发现当h小于1.5 m时,由于接收到的可供定位信号数大幅减少,无法满足定位所需信号数要求,不能进行定位。图6为h=3 m,Pt=4 W,室内LED照明灯分布平面图中相邻LED灯间隔a取不同值时,所接收到的不同LED信号的信噪比。从图6可看出,接收到的信号质量还与LED灯分布情况有关,相邻LED灯间隔越大,信号质量越差。
5 结 论
在室内环境下,照明灯发光强度波动、信号光的遮挡、光背景噪声等都会影响接收信号的信噪比。为提高室内定位系统的抗干扰性能,建立了室内可见光定位系统信号传输的信道模型及噪声模型。模型主要是针对室内可见光定位应用中的视距传播信号的发送和接收。仿真结果表明,定位接收器所接收信号的信噪比与LED照明灯发射信号的功率成正比,与接收器距LED照明灯分布平面的垂直距离成反比,与LED照明灯分布密度成正比。计算结果发现,接收器所接收到的不同位置LED灯信号信噪比有比较明显的差异,最大相差19.04 dB,最小相差1.05 dB。计算结果表明,定位中对光源的优选很有必要,是提高室内定位系统抗干扰性能的重要措施,也是提高接收信号强度测距法测量精度的必要手段。仿真结果对于指导室内定位系统设计具有一定的参考价值。
参考文献:
[1] ZHANG W,KAVEHRAD M.A 2-D indoor localization system based on visible light LED[C]∥2012 IEEE Photonics Society Summer Topical Meeting Series.Seattle,WA,2012:8081.
[2] YOSHINO M,HARUYAMA S,NAKAGAWA M.High-accuracy positioning system using visible LED lights and image sensor[C]∥2008 IEEE Radio and Wireless Symposium.Orlando,FL,2008:439442.
[3] VEGNI A M,BIAGI M.An indoor localization algorithm in a small cell LED-based lighting system[C]∥2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN).Sydney,2012:17.
[4] KOMINE T,NAKAGAWA M.Fundamental analysis for visible-light communication system using LED lights[J].IEEE Transactions on Consumer Electronics,2004,50(1):100107.
[5] MANOR H,ARNON S.Performance of an optical wireless communication system as a function of wavelength[J].Applied Optics,2003,42(21):4285-4294.
[6] ARAFA A,JIN X,KLUKAS R.Wireless indoor optical positioning with a differential photosensor[J].IEEE Photonics Technology Letters,2012,24(12):10271029.
[7] GU W J,KASHANI M A,KAVEHRAD M.Multipath reflections analysis on indoor visible light positioning system[Z/OL].(20150406)[20160120].https:∥arxiv.org/abs/1504.01192.
[8] MOREIRA A J C,VALADAS R T,DE OLIVEIRA DUARTE A M.Optical interference produced by artificial light[J].Wireless Networks,1997,3(2):131140.
[9] TANAKA Y,KOMINE T,HARUYAMA S,et al.Indoor visible light data transmission system utilizing white LED lights[J].IEICE Transactions on Communications,2003,E86B(8):24402454.
[10] KORNINE T,NAKAGAWA M.Fundamental analysis for visible-light communication system using LED lights[J].IEEE Transactions on Consumer Electronics,2004,50(1):100107.
[11] TAMURA T.Fundamental characteristics of the illuminating light source using white LED based on InGaN semiconductors[J].IEEJ Transactions on Fundamentals and Materials,2000,120(2):244249.
[12] ZHANG W Z,CHOWDHURY M I S,KAVEHRAD M.Asynchronous indoor positioning system based on visible light communications[J].Optical Engineering,2014,53(4):045105.
[13] MEYER-ARENDT J R.Radiometry and photometry:units and conversion factors[J].Applied Optics,1968,7(10):20812084.
[14] KIM H S,KIM D R,YANG S H,et al.An indoor visible light communication positioning system using a RF carrier allocation technique[J].Journal of Lightwave Technology,2013,31(1):134144.
[15] GFELLER F R,BAPST U.Wireless in-house data communication via diffuse infrared radiation[J].Proceedings of the IEEE,1979,67(11):14741486.
(編辑:张磊)
