视觉测量中圆形标志两种提取方法的比较
2017-06-14刘泽庆张玉荣蔡灿伟
刘泽庆+张玉荣+蔡灿伟
摘要:针对靶场视觉测量相机标定中圆形标志在复杂背景图像上的提取和定位问题,研究了两种不同的圆形标志提取方法,一种是基于感兴趣区域的交互式提取方法,另一种是基于图像灰度和几何形态学的提取方法。对两种方法的圆形标志提取过程进行了研究,并分别采用两种方法对视觉测量图像中的圆形标志进行提取实验,对两种方法的边缘提取效果和定位结果进行了对比,分析了两种方法的优势和不足。圆形标志的提取结果表明,第一种方法能够平滑地提取出圆形标志的边缘,但受圆形标志的成像情况影响较大,第二种方法边缘提取效果受圆形标志的成像情况影响较小,但提取出的边缘为锯齿形,部分圆形标志的像素点被误判为背景,与圆形标志的实际成像有一定误差。
关键词: 圆形标志; 图像提取; 图像定位; 感兴趣区域; 椭圆拟合
中图分类号: TP 391.41 文献标志码: A doi: 10.3969/j.issn.1005-5630.2017.02.005
文章编号: 1005-5630(2017)02-0026-08
引 言
视觉测量中常采用设定的人工标志点作为已知点来进行相机内外参数的标定。人工标志点的世界坐标可以通过预先测量得到,人工标志点在图像上的位置坐标要通过图像提取来确定[1]。针对靶场视觉测量中测量距离远、背景复杂、干扰因素多等问题,选择图1所示的圆形标志作为标志点,圆形标志具有旋转不变性,以一定角度拍摄后成像为椭圆,相比于线形或点状的标志,具有更强的稳健性[2]。在相机标定模型确定的情况下,相机内外参数的标定精度不仅与标志点的世界坐标精度有关,还与标志点在图像上的提取和定位精度有关[3]。
由于拍摄角度的原因,圆形标志在图像上呈现为椭圆,因此圆形标志的提取主要是椭圆的检测问题。Hough变换及其改进算法[4-5]是常用的椭圆检测方法,基于Hough变换的方法在进行椭圆检测时需要将图像空间映射到参数空间进行多维统计计算,计算量大且效率低。同时,在进行现场视觉测量时,图像背景较为复杂,在静爆实验中还会受到冲击波、扬尘等复杂因素的干扰,因而Hough变换的应用较为困难[6]。针对这些问题,研究了基于感兴趣区域(ROI)的交互式提取方法和基于图像灰度和几何形态学的提取方法,分别对圆形标志图像进行提取定位。这两种方法计算量小,能够在已知标志点个数的情况下快速完成对圆形标志的定位。
本文研究了基于感兴趣区域的最小二乘拟合提取和基于图像灰度和几何性质提取的两种方法,对两种方法的提取过程进行了论述,并采用两种提取方法对圆形人工标志进行了提取实验,通过对比分析了两种方法的优点和不足。
1 基于感兴趣区域的最小二乘边缘拟合提取方法
1.1 感兴趣区域的提取
1.1.1感兴趣区域
在背景复杂的图像中进行目标提取时,目标的提取效率较低,提取效果较差。为了缩小目标提取时的搜索范围,降低复杂背景因素的影响,可以在目标提取前提取目标所在的感兴趣区域。感兴趣区域是指图像、视频中能够引起人的视觉系统注意力的区域,这些区域往往具有相对于周围环境比较显著的亮度、颜色、形状、纹理等特征[7]。感兴趣区域包含了图像的主要信息和关键信息,因而对感兴趣区域的处理可以近似代替对原图像的处理,这可以大大减少计算量,降低图像处理的复杂程度[8]。
感兴趣区域的提取方法主要有人机交互式方法、基于注视点的方法、基于视觉注意模型的方法、基于特定对象分割的方法等[9]。其中,人机交互式方法操作简单,实现容易,因而采用交互式方法提取标定圆所在的感兴趣区域。
1.1.2感兴趣区域的交互式提取
将标定圆外侧黑色边框所包围的区域作为感兴趣区域(图1),感兴趣区域的交互式提取通过人工选取标定圆所在的矩形区域来实现。以MATLAB 2014b软件作为图像处理工具,采用waitforbuttonpress函数来获取鼠标在图像上点击位置点的坐标来获取选中的区域。
1.2 圆形标志的边缘提取
圆形标志的提取以其中一个圆形标志为例进行说明。圆形标志的提取转化为对其中椭圆的提取,椭圆检测步骤如下:
1) 输入圆形标志的感兴趣区域I1,记录感兴趣区域左上角的位置坐標(x0,y0);
2) 滤波处理,对I1进行中值滤波处理,在不损失目标信息的同时降低噪声对椭圆边界的影响,增强椭圆边缘像素之间的联通性;
3) 二值化处理,对图像进行二值化,将背景区域像素值置为0,圆形标志区域像素值置为1;
4) 区域填充,对封闭区域内部进行填充,消除边缘上的空洞;
5) 干扰区域剔除,对图像上的联通区域进行检测并统计各个联通区域的像素数作为联通区域的特征面积,面积最大的区域为圆形标志所在区域,剔除其他面积较小区域;
6) 边缘提取,Canny算子[10]具有精度高、运算速度快等特点,因而采用Canny算子对圆形标志的边缘进行提取;
7) 根据步骤6)中提取到的边缘坐标和左上角的位置坐标(x0,y0),即可得到原图像中圆形标志边缘在图像上的坐标。
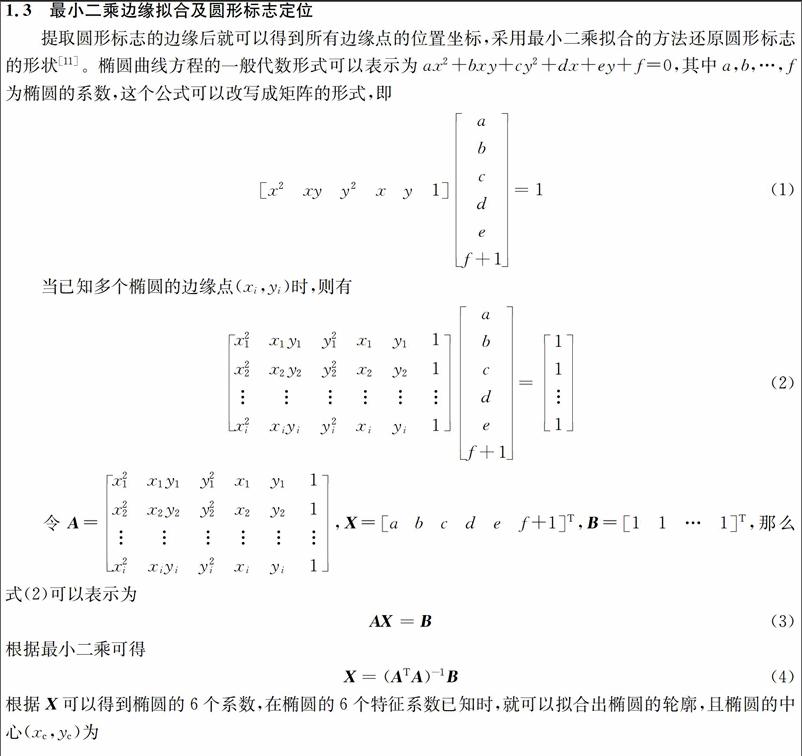
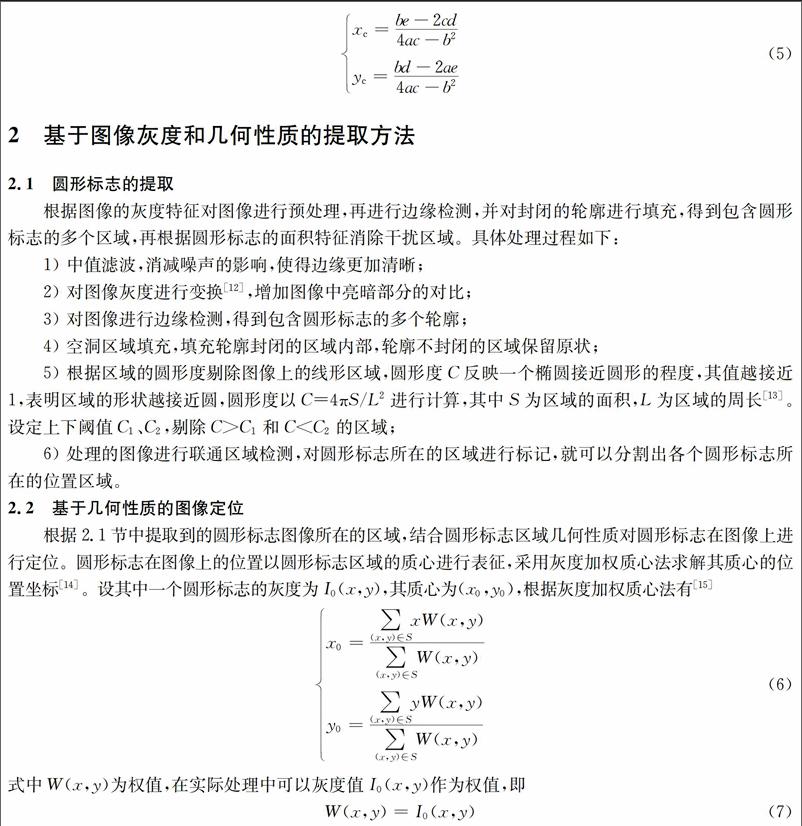
1.3 最小二乘边缘拟合及圆形标志定位
提取圆形标志的边缘后就可以得到所有边缘点的位置坐标,采用最小二乘拟合的方法还原圆形标志的形状[11]。椭圆曲线方程的一般代数形式可以表示为ax2+bxy+cy2+dx+ey+f=0,其中a,b,…,f为椭圆的系数,这个公式可以改写成矩阵的形式,即
2 基于图像灰度和几何性质的提取方法
2.1 圆形标志的提取
根据图像的灰度特征对图像进行预处理,再进行边缘检测,并对封闭的轮廓进行填充,得到包含圆形标志的多个区域,再根据圆形标志的面积特征消除干扰区域。具体处理过程如下:
1) 中值滤波,消减噪声的影响,使得边缘更加清晰;
2) 对图像灰度进行变换[12],增加图像中亮暗部分的对比;
3) 对图像进行边缘检测,得到包含圆形标志的多个轮廓;
4) 空洞区域填充,填充轮廓封闭的区域内部,轮廓不封闭的区域保留原状;
5) 根据区域的圆形度剔除图像上的线形区域,圆形度C反映一个椭圆接近圆形的程度,其值越接近1,表明区域的形状越接近圆,圆形度以C=4πS/L2进行计算,其中S为区域的面积,L为区域的周长[13]。设定上下阈值C1、C2,剔除C>C1和C 6) 处理的图像进行联通区域检测,对圆形标志所在的区域进行标记,就可以分割出各个圆形标志所在的位置区域。 2.2 基于几何性质的图像定位 根据2.1节中提取到的圆形标志图像所在的区域,结合圆形标志区域几何性质对圆形标志在图像上进行定位。圆形标志在图像上的位置以圆形标志区域的质心进行表征,采用灰度加权质心法求解其质心的位置坐标[14]。设其中一个圆形标志的灰度为I0(x,y),其质心为(x0,y0),根据灰度加权质心法有[15] 3 提取实验 为了比较上述两种方法的标定圆提取效果,以在实验室采集的圆形标志的图像为例进行提取实验。 3.1 基于感兴趣区域的最小二乘边缘拟合提取实验 在采集的实验图像上,提取5个圆形人工标志,如图2(a)所示;得到的圆形人工标志1所在的感兴趣区域,如图2(b)所示;对圆形人工标志的感兴趣区域进行二值化,分割出图像上灰度值较高的部分,如图2(c)所示;统计各个联通区域的像素数作为其特征面积,其中面积最大的区域为圆形人工标志,其他部分为干扰区域,对干扰区域进行剔除,剔除结果如图2(d)所示;采用Canny算子对剔除干扰区域后的图像进行边缘提取,如图2(e)所示;根据检测到的边缘点的坐标进行椭圆拟合,得到椭圆的方程,并根据椭圆方程求解椭圆中心坐标,最终处理结果如图2(f)所示。 3.2 基于图像灰度和几何性质的提取实验 对图像进行中值滤波处理以减小噪声影响,结果如图3(a)所示;对图像进行灰度变换来增强图像的对比度,结果如图3(b)所示;对图像进行边缘检测,得到图3(c)所示较清晰边缘;对检测到的图像边缘中的封闭区域进行填充,圆形人工标志与部分干扰区域得到填充,不封闭的边缘保持原状,如图3(d)所示;计算填充后各个区域的圆形度,并根据圆形度排除其中的干扰区域,结果如图3(e)所示;根据灰度加权质心法对圆形人工标志进行定位,结果如图3(f)所示。 3.3 圆形标志提取结果对比 3.3.1边缘提取效果对比 采用上述两种方法得到圆形标志1和圆形标志5的边缘提取效果,如图4和图5所示。从图4(a)可以看出,方法一提取的边缘为平滑椭圆,边界拟合效果较好,能够清晰地反映圆形标志的边缘。从图4(b)可以看出,方法二所提取的边缘能够反映边缘的基本情况,但是有少部分边缘像素由于图像分割等原因被误判为背景。对比图5(a)和图5(b)可以发现:虽然方法一能够提取出规则的椭圆,但是所提取轮廓在圆形标志5的内部,有较多的圆形标志像素点被误判为背景,提取效果较差;方法二提取圓形标志5时虽然边缘不够平滑,但是能够提取出圆形标志5的实际边缘,将圆形标志从背景分割出来,较方法一效果好。 3.3.2圆形标志定位结果对比 通过上述两个圆形标志提取实验,得到5个圆形标志在图像中的位置,两种方法对5个圆形标志的定位结果及两种方法的标定偏差Δs(Δs=(x1-x2)2+(y1-y2)2)如表1所示。 从表1可以看出,两种方法对圆形标志的定位结果比较接近,对成像为较规则椭圆形状的圆形标志1、圆形标志2和圆形标志3进行定位时,最大定位偏差为0.26 pixel;对成像为相对不规则椭圆形状的圆形标志4和圆形标志5进行定位时,定位偏差较大,最大偏差为0.51 pixel。 3.3.3原因分析与改进 圆形标志1拍摄时接近垂直拍摄,因而成像为较规则的椭圆,方法一提取效果较好;而圆形标志5拍摄角度较大,所以成像为较不规则的椭圆,方法一提取效果较差。这与采用的最小二乘边缘拟合方法有关,对较规则的椭圆进行拟合的结果与原图较接近,而拟合较不规则的椭圆,拟合边缘与原来边缘相差较大,另外也与边缘提取时采用的算法有关。方法二提取边缘时是根据图像边缘的点阵进行判别提取的,因而提取到的是离散点而不是平滑曲线,这是图像本身属性所决定的,因而在图像的定位上会有一定的系统误差,这是无法避免的。 通过对这两种方法的研究,尤其针对圆形标志5这种不规则的椭圆拟合情况,可以将两种方法结合使用,采用方法二提取得到圆形标志的边缘,再采用方法一中的椭圆拟合处理方法来拟合椭圆,在一定程度上能改进边缘拟合效果,提高圆形标志的定位精度。 4 结 论 研究了两种圆形标志提取方法,即基于感兴趣区域的最小二乘边缘拟合方法和基于图像灰度和几何性质的方法,采用两种方法分别对图像中的5个圆形标志进行了提取和定位,并对比了两种方法的边缘提取效果和定位结果。 对比边缘提取效果和圆形标志定位结果可以发现:基于感兴趣区域的最小二乘边缘拟合方法通过提取感兴趣区域能够有效降低图像处理计算量,在圆形标志成像较规则时能够得到与圆形标志实际成像一致的平滑椭圆边缘,但该方法需要人工辅助,且在圆形标志成像不规则时,边缘拟合效果较差;基于图像灰度和几何性质的方法以圆形标志的灰度特征和几何特征为基础,在没有人工干预的情况下能够根据图像灰度的变化自动描绘出圆形标志的轮廓,边缘提取效果不受圆形标志的成像情况影响,但该方法提取的边缘为锯齿形轮廓,部分圆形标志上的像素点被误判为背景,与圆形标志的实际成像情况有一定误差。
参考文献:
[1] 舒新炜,杨波.基于双目立体视觉的低频振动测量[J].光学仪器,2016,38(2):9599.
[2] 闫蓓,王斌,李媛.基于最小二乘法的椭圆拟合改进算法[J].北京航空航天大学学报,2008,34(3):295298.
[3] 卢成静,黄桂平,李广云,等.视觉检测中圆形标志的定位方法研究[J].宇航计测技术,2008,28(2):57.
[4] 陈燕新,戚飞虎.一种新的基于随机Hough变换的椭圆检测方法[J].红外与毫米波学报,2000,19(1):4347.
[5] XU L,OJA E.Randomized Hough transform(RHT):Basic mechanisms,algorithms and computational complexities[J].CVGIP:Image Understanding,1993,57(2):131154.
[6] 陳小艳,王强,李柏林.改进的Hough变换检测圆方法[J].计算机系统应用,2015,24(8):197201.
[7] HUANG C B,LIU Q,YU S S.Regions of interest extraction from color image based on visual saliency[J].The Journal of Supercomputing,2011,58(1):2033.
[8] 陈再良.图像感兴趣区域提取方法研究[D].长沙:中南大学,2012.
[9] 方相如.基于视频图像显著图的感兴趣区域提取方法研究[D].西安:西安电子科技大学,2013.
[10] 吴云,胡倩,曹志民.基于改进Canny算子的光纤面板暗影检测[J].光学仪器,2008,30(5):1418.
[11] 王万国,王仕荣,徐正飞,等.基于边界的最小二乘椭圆拟合改进算法[J].计算机技术与发展,2013,23(4):6770.
[12] 王莹,王劲松,崔士宝,等.LabVIEW Vision在汽车发动机进气管检测系统中的应用[J].光学仪器,2015,37(4):308313.
[13] 刘祥磊,童小华,马静.视频测量影像序列椭圆形人工目标点快速识别和跟踪方法[J].测绘学报,2015,44(6):663669.
[14] 于起峰,陆宏伟,刘肖琳.基于图像的精密测量与运动测量[M].北京:科学出版社,2002.
[15] 徐庆富,裴仁清,何岚岚,等.面向浮雕的激光测量中光刀中心提取[J].光学仪器,2009,31(5):15.
(编辑:张磊)
