基于低空域小型无人机航拍技术的城市交通拥堵管控研究
2017-06-10邱文城李土生吴祥发罗永枝李炜旻
邱文城+李土生+吴祥发+罗永枝+李炜旻

摘 要:针对目前交通视频处理系统对交通流相关参数的提取仍处于初级发展阶段,各种技术研究对交通流相关参数的提取存在局限性、检测误差大等问题,展开了基于低空域小型无人机航拍技术的城市交通拥堵管控研究,结合无人机拍摄视频检测技术及图像处理技术,解决了利用无人机拍摄视频检测技术解决交通视频处理系统对交通流的相关参数提取困难、检测精度低等问题。
关键词:无人机;视频检测技术;交通流参数
引言
常规的交通流检测是通过路侧的电子监控装置和现场交警人工目测的手段获取现场交通信息,这种传统的方法存在着范围小、误判率高、效率低和成本高等缺陷。本项目结合小型无人机(Unmanned Aerial Vehicle)飞行灵活、能在空中自由懸停及自带摄像机等特性,利用小型无人机在城市低空域航拍采集交通流参数,以获取大范围的实时交通路况信息,快速判读交通拥堵级别。
1 图像预处理
在进行交通流基本参数提取之前,要对采集的视频进行预处理,主要包括设置图像的感兴趣区域(ROI)、混合高斯模型、图像腐蚀与膨胀运算、车辆轮廓提取。
1.1 设置图像的感兴趣区域(ROI)
设置感兴趣区域(ROI:Region Of Interest)是指从图像中圈出一个图像区域,圈出区域作为图像分析所关注的目标,并对圈出区域进一步处理,减少图像处理时间及外部环境的干扰,增加精度。
1.2 混合高斯模型
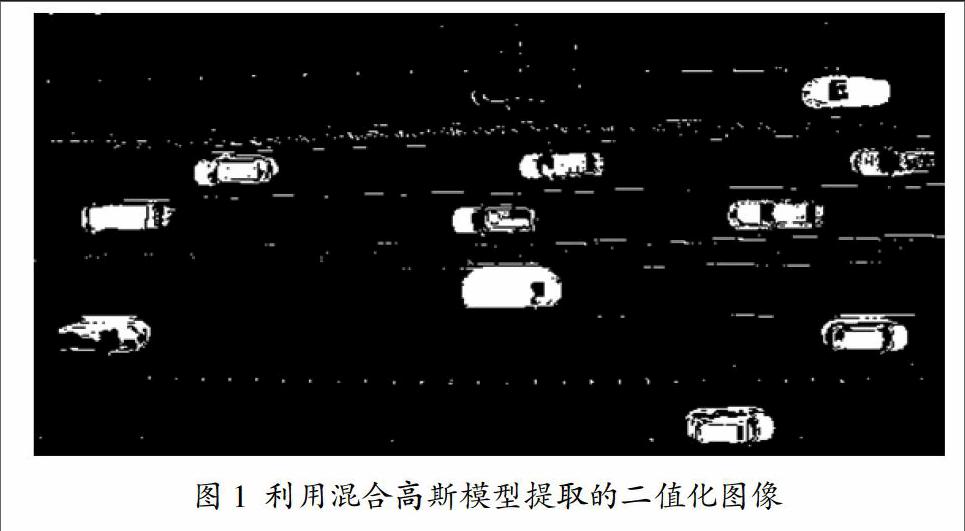
利用混合高斯模型,将拍摄的视频序列的前几帧图像提取一张完全没有车辆在道路中行驶的背景图像,再将背景图像与当前图像对比,检测出当前图像中正在运动的车辆,并以二值化图像显示。如图1所示,其中黑色为道路背景,白色为运动中的车辆。
图1 利用混合高斯模型提取的二值化图像
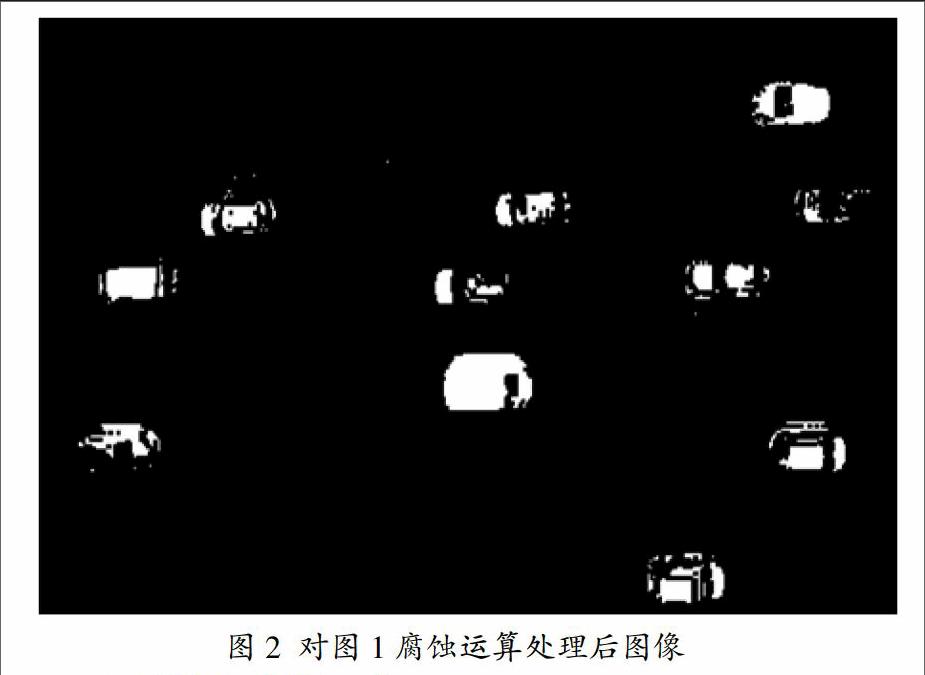
1.3 图像腐蚀与膨胀运算
腐蚀运算在数学形态学运算中的作用是消除小于结构元素的点,膨胀运算在数学形态学运算中的作用是扩展物体的边界点。通过混合高斯模型提取前景二值化图像后,利用腐蚀运算处理消除图像中无意义的像素点,再利用膨胀运算处理填补车辆中的空洞,使车辆轮廓更加完整,为下一步的车辆轮廓提取做准备。
1.4 车辆轮廓提取
车辆轮廓的提取主要是对前面一系列图像处理后得到的二值化图像进行检测,以检测二值化图像中车辆轮廓的最外围像素点为边界点绘制矩形边框。如图4为图3二值化图像经车辆轮廓提取绘制矩形框后的图像。
2 交通流基本参数检测
2.1 基于单虚拟线圈的交通量检测
交通量的获取是在图像中设置一条虚拟线圈,虚拟线圈设置的位置需与道路相垂直,如图5A线所示。捕捉图像中每个矩形边框车头方向任意一个顶点的坐标,当顶点坐标落到设置的虚拟线圈的范围内时,检测到车辆通过虚拟线圈所在的横断面,统计的交通量数值加1。
2.2 基于双虚拟线圈的行车速度检测
行车速度检测则需要设置两条虚拟线圈配合检测。在图像原有一条用于统计交通量的虚拟线圈的基础上,加设一条相互平行的虚拟线圈,同样以捕捉图像中每个矩形边框车头方向任意一个顶点坐标的方法进行检测。当车辆触碰虚拟线圈1时,记录该图像所处帧数和车辆所处车道,当同一车道该车辆触碰虚拟线圈2时,记录该图像所处帧数。获取视频的帧率(单位:1/秒),可得到车辆通过两条虚拟线圈所需时间,再将图像中两条虚拟线圈之间的距离换算成实际距离(单位:米),则车辆行驶的速度(单位:公里/小时)可表示为:
V=■
2.3 车流密度获取
车流密度的获取,通过获取每一帧图像中所有矩形边框的总面积,及道路面积,则矩形边框总面积占道路面积的比率,再将得到的比率通过大量实验,换算成车流密度K。
3 检测结果验证
3.1 车辆数验证
在同车流密度不同高度、同高度不同车流密度两种情况下进行车辆数检测,将实际车辆数与程序检测得的车辆数进行比较,如表1所示。
表1 车辆数验证
从表1中可以看出,车辆数的检测精确度较高,最大精确度为100%,最小精确度为92.9%。精确度的下降主要是随着飞行高度的增大,视频背景愈加复杂,影响车辆的识别,程序检测时出现漏检现象。漏检对象的主要是颜色与灰色相近的车辆,随着飞行高度的增大,不易将其检测出来,但在低空飞行高度研究范围内,车辆数检测的精确度在可接受范围之内。
3.2 行车速度验证
选取具有不同行车速度的几个视频进行验证,将程序检测与人工计算的行车速度比较,如表2和表3所示。
表2 在15m飞行高度下佛山大道行车速度验证
从表2和表3中可以看出,行车速度的检测精确度较高,出现最大精确度高达为99%,最小精确度为96%,检测的两条道路平均速度精确度分别98%和97%,精确度较高。从表中也可以看出程序对行车速度在21km/h~57km/h之间的车辆都可以检测出来其行车速度,且产生误差较小,在研究范围内属于可接受范围之内。
4 结束语
通过OpenCV和C++6.0组建的程序设置的虚拟线圈及捕捉矩形边框顶点坐标的方法,计算出检测画面中的交通量和车辆的行车速度,检测结果证明利用此方法计算的数据精确度高达90%以上,与传统方法相比,利用无人机航拍获取交通流参数的方法具有更高的时效性和准确性,是未来交通检测技术的发展方向之一。
作者简介:邱文城(1995,7-),男,汉族,广东普宁市人,佛山科学技术学院在校学生,学历:本科,研究方向:交通工程。
