基于双动轴数学模型的牵引电机驱动转矩模拟及观测
2017-05-15徐诗孟
徐诗孟,王 英,沈 飞
1 引言
在以往研究列车牵引电机运行特性和性能的过程中,常采用单动轴模型[1、2],对一台电机的驱动转矩进行模拟。但动车组普遍为架控或车控模式,即一台牵引逆变器同时向2~4台牵引电机供电。为对单个转向架上的两台并联牵引电机的驱动转矩进行模拟,本文在考虑轮轨黏着的条件下,建立了列车转向架的双动轴数学模型。
文献[3]采用最小阶降维观测器对电机驱动转矩进行观测。但动车组电磁环境恶劣,包含大量的接触器、继电器、断路器及高频变换器等,信号测量过程中含有较大的噪声,且易受外界干扰,使得最小阶观测器产生较坏的系统性能。本文采用全维状态观测器,可避免因噪声干扰或测量误差而对系统的性能造成影响。
2 转向架双动轴数学模型
2.1 轮轨黏着机理
动轮与钢轨接触处,在车轴载荷Wg作用下会产生弹性变形,形成椭圆形的接触面。由于正压力而出现的保持轮轨接触处相对静止而不出现相对滑动的现象称为“黏着”。黏着状态下的静摩擦力Fμ又称为黏着力。牵引电机作用在动轮上的驱动转矩Mi在轮轨接触处会形成切向力Fi,在其作用下,动轮在钢轨上滚动时,车轮和钢轨的粗糙接触面会产生新的弹性形变,接触面间会出现微量滑动,即所谓“蠕滑”。轮轨黏着-蠕滑现象示意图如图1所示。
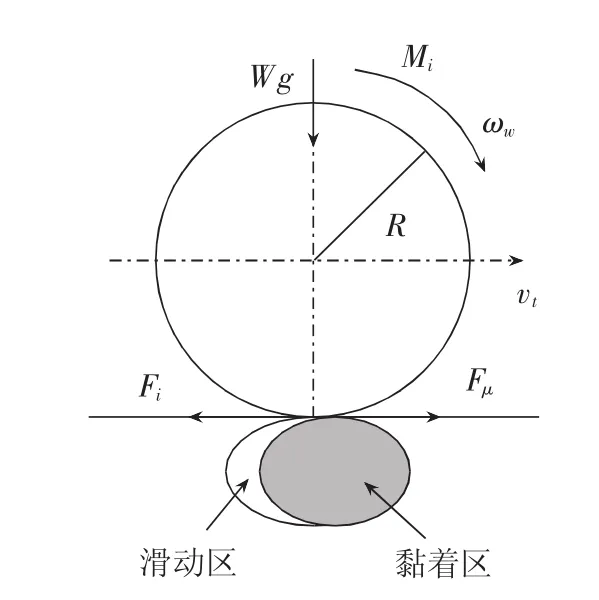
图1 轮轨黏着-蠕滑现象示意图
为反映轮轨间的蠕滑程度和黏着力的大小,提出如下两个概念:

式中:vslip为蠕滑速度,vw是轮对轮周的线速度,vt是车体速度,Fμ为黏着力,μ为黏着系数,W为平均轴重,g为重力加速度常数。
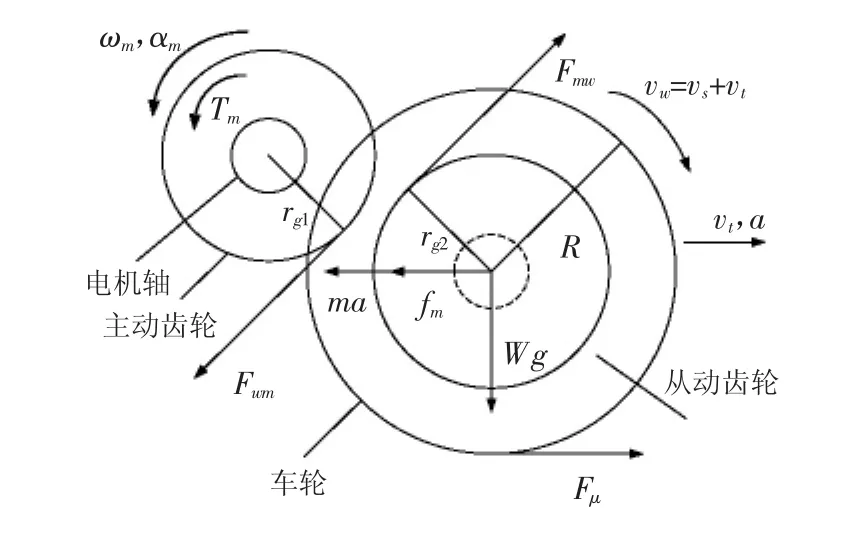
图2 轮对受力分析
图2所示为轮对的受力分析,可得到公式(3)-(5):
牵引电机输出轴转动方程:

轮对驱动轴转动方程:

齿轮箱传动特性表达式:

由式(3)~(5)可推得:

由轮轨黏着机理可知,当动轮处于纯滚动(非空转、打滑)状态时,图 1 中的 Fi=Fμ,所以 Fi与 Fμ对应的归算到牵引电机侧的转矩相等,即:


式(8)为各参量归算到牵引电机侧的电机转动方程。Jm为牵引电机与主传动机构的转动惯量之和;Jw为轮对与从动机构的转动惯量之和;Tm为牵引电机电磁转矩;Ti为牵引电机驱动转矩;R为轮对半径;ig为齿轮传动比;ηgear为齿轮传动效率;ωm为单机转速;ωw为轮对转速;Bm,Bw为主、从动轴转动黏滞系数;Jequ为电机侧等效转动惯量;B为电机侧等效转动黏滞系数。
2.2 考虑黏着的转向架双动轴数学模型
为了更准确地对并联电机驱动转矩进行模拟,并分析引起并联牵引电机转矩不平衡的各因素,本文采用了基于一台转向架的双动轴模型,如图3所示。
在单轴模型基础上,结合式(1)-(8)可得转向架“双动轴数学模型”的表达式为:
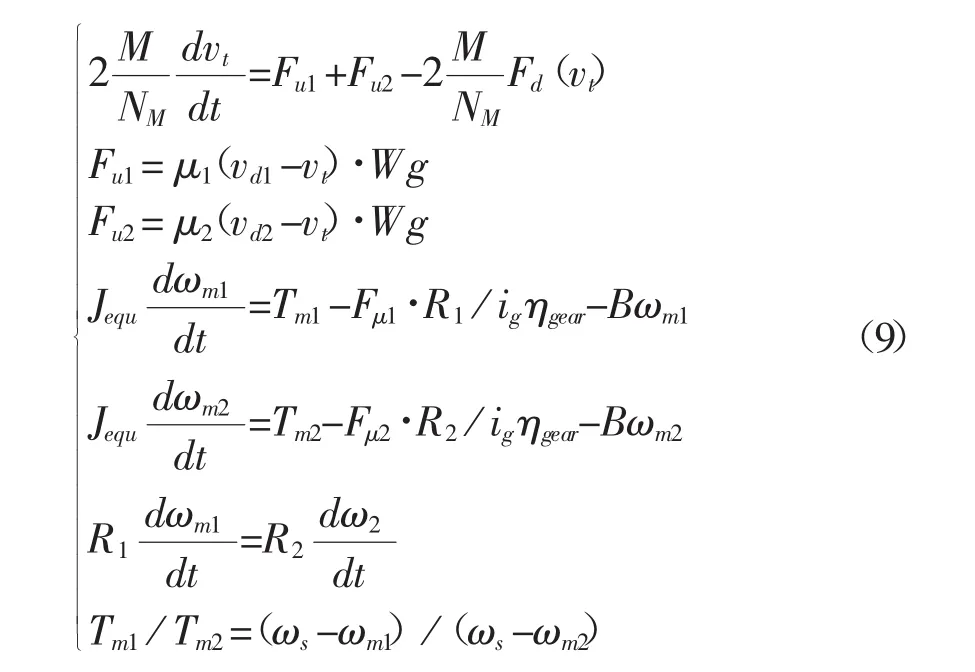
其中:M为列车质量;NM为动轴数;Fd(vt)为列车单位基本阻力;μ1,μ2为动轮 1、2与轨道间的黏着系数;ωm1、ωm2为电机 1、2 的转子角速度;R1、R2分别为动轮 1、2 的轮对半径;Tm1、Tm2分别为电机1、2的转矩;ωs为同步角速度。
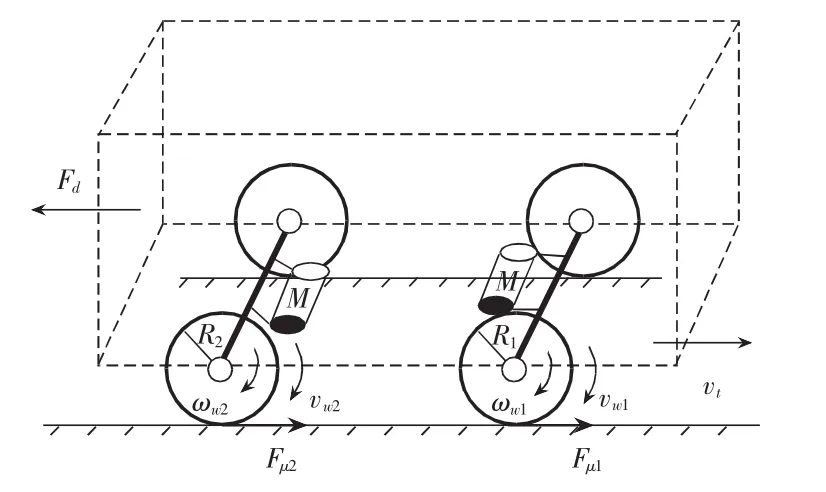
图3 双动轴模型
3 并联牵引电机的驱动转矩
3.1 并联牵引电机的驱动转矩模拟
列车实际运行时,由于机械结构的制约,同一转向架上两个轮对轮周线速度(vw)是近似相等的,因此

将等式(10)进行微分处理,结合式(8)且忽略转动黏滞系数,可得

假设同一转向架下两台牵引电机特性完全相同或相近,且忽略定子电阻Rs和漏感Lls,那么感应电机的电磁转矩Tm为:

其中,p为电机极对数,Rr为转子电阻,Us为定子电压,ωsl为转差角速度。
因为同一转向架下并联的两台牵引电机由一台牵引变流器拖动,因此,对应电机1和2的转矩Tm1和 Tm2,在(12)中的 Us和 ωs是相同的,所以

令 ωs=ωm1+ωsl,根据式(10)可得,将上式带入式(13)中可得

将式(14)带入式(11)中可得

所以,为了真实模拟列车转向架的机械制约关系,两台牵引电机的驱动转矩应满足式(15)的要求。由式(8)可知,若忽略转动黏滞系数,则驱动转矩Ti可视为电机转动方程中的等效负载,因此可得如图4所示的并联牵引电机驱动转矩模型框图。

图4 同一转向架制约的并联电机驱动转矩模型
上图中的车体速度vt由图5所示的转向架动力学模型产生,ωm1、Tm1、ωsl由图 6 所示电机转子磁场定向矢量控制模块给出。

图5 转向架动力学模型原理框图
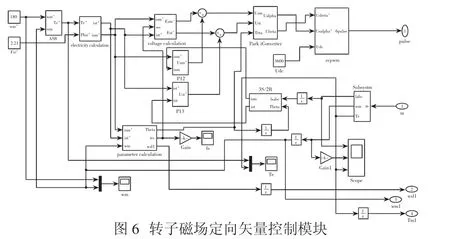
图6 转子磁场定向矢量控制模块
3.2 并联电机驱动转矩不平衡的影响因素
3.2.1 轮径差异
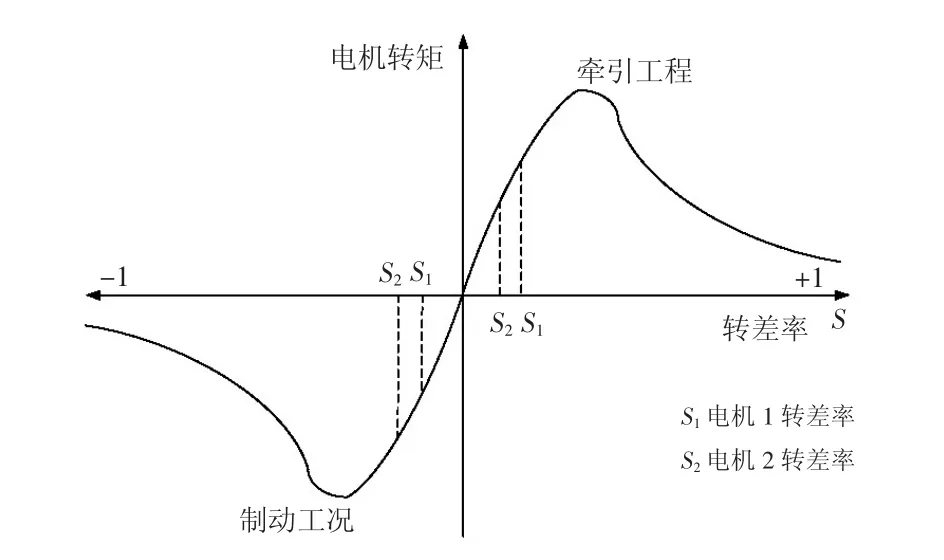
图7 牵引电机的转矩-转差率曲线
设一台转向架上的两组动轮半径分别为R1和R2,两动轴上的并联电机转速分别为n1和n2,如果 R1>R2,则 n1<n2。如图 7 所示,异步电动机转矩特性偏硬,即使转差率有细微变化,也会对并联电机间的负荷分配造成很大的影响。轮径差异越大,两牵引电机间的转矩不平衡程度就愈严重。
3.2.2 车速大小
由于轮径差异的存在,同一转向架下并联的两牵引电机间存在转子角速度差值。设ω1和ω2分别为电机1和2的转子角速度,S1和S2分别为电机1和2的转差率,ωs为同步角速度,则
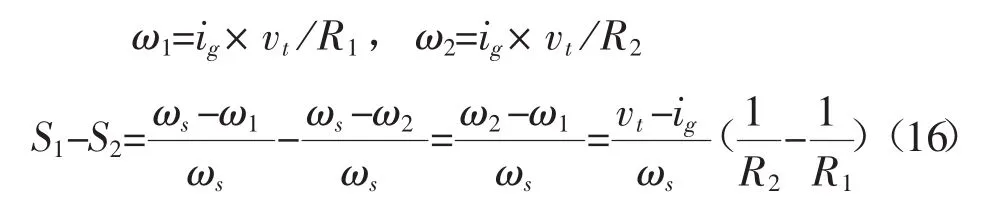
由式(16)可以看出,随着列车运行速度vt的提高,电机1和2之间的转子角速度差值越来越大,电机转差率差异也越来越大。由于电机转矩与转差率近似呈正比,所以同一逆变器驱动的并联电机之间的转矩不平衡程度会愈加严重。
4 牵引电机的驱动转矩观测
4.1 全维状态观测器的建立
在列车正常运行时,即轨面状态(干燥/潮湿)固定,列车未发生空转或打滑,轮轨间的黏着系数只在一个很小的范围内波动,因此,在建立状态观测器时,可认为牵引电机的驱动转矩Ti为一常数。本文在此仅以一台电机为例进行研究。
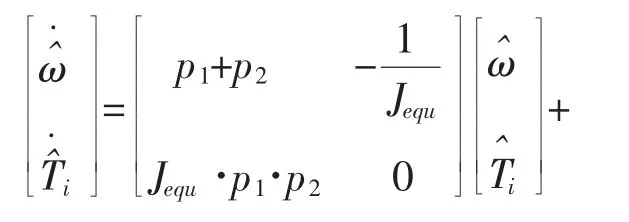
根据式(7)和式(8)可得如下的状态空间表达式:

由式(17)可知,状态矢量[ω Ti]T可由Tm和ω进行重构(即建立状态观测器,使观测结果无限接近实际值)。基于式(17)构建具有反馈增益矩阵的全维状态观测器[4、5]如下:
4.2 观测量的估计误差
由于本文设计的是具有反馈增益的闭环渐进状态观测器,通过研究所观测变量的估计误差的衰减情况,便可确定观测器的动态响应速度。
牵引电机驱动转矩的估计误差[6]为:
由齐次方程的解法可得:

其中,e(0)为初始值,

5 仿真分析
基于CRH2A型动车组参数,在Matlab/Simulink中搭建了同一转向架制约下的并联电机驱动转矩模型和全维状态观测器模型。牵引电机参数可参考文献[7],表1为转向架相关参数设置值。

表1 转向架相关参数
图8为牵引电机驱动转矩特性仿真曲线。如图8(a)、(b)所示,由于 R1>R2,故 n1<n2。牵引工况时,电机2的转差率小于电机1的转差率,且在同一时刻,其电磁转矩比电机1要小,故而电机2的驱动转矩也比电机1要小。由图8(a)、(b)还可以看出,随着车体速度的增大,并联电机的驱动转矩不平衡程度愈加严重,且满足式(16)的推导关系。由于牵引电机的驱动转矩平均值与电机电磁转矩平均值十分接近,故而可把列车牵引特性曲线中的电磁转矩用驱动转矩来替换。如图8(c)所示,仿真结果满足该特性曲线,低速区牵引力准恒定,即随速度升高而略有下降,这与列车黏着特性随速度增加而下降的趋势相适应。

图8 牵引电机驱动转矩特性仿真曲线
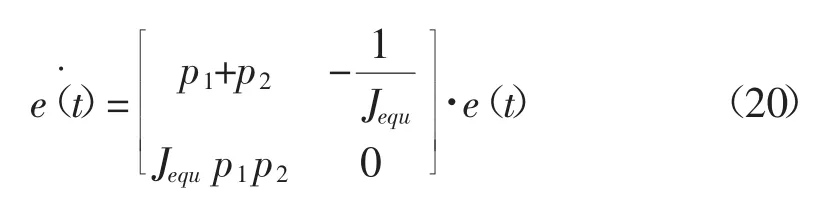
P1=-10、P2=-10情况下的转矩观测特性曲线和误差曲线如图9所示。P1=-100、P2=-100情况下的转矩观测特性曲线和误差曲线如图10所示,e(0)初始值设为[1.5 0]T。

图9 P1=-10、P2=-10情况下观测器输出特性
图10 P1=-100、P2=-100情况下观测器的输出特性
图9和图10的Ti1为实际值,为观测值。对比图9和图10的仿真结果可以看到,当极点P1、P2均取负值且距虚轴越远时,观测结果越好。极点值的合理配置,能够加快观测器的收敛速度,改善其动态响应能力。
为保证全维状态观测器的性能稳定和快速收敛,可按文献[9]提出的方法对极点进行配置。综上所述,本文进行仿真时,观测器极点取P1=-100,P2=-100。
6 结束语
本文以列车单动轴模型为基础,结合转向架机械制约,提出了单转向架的双动轴数学模型。基于该模型实现了并联电机的驱动转矩模拟,建立了全维状态观测器,有效降低了噪声干扰和测量误差对值的影响。基于Matlab/Simulink的观测器仿真结果,反映出关键因素对转矩不平衡程度的影响,说明通过恰当的极点配置,全维状态观测器能够准确有效地对牵引电机的驱动转矩进行观测。
参考文献:
[1]Meifen C,Takeuchi k,Furuya T,et al.Adhesion control in low-speed region and experiment verification with considering low-resolution pulse generator[J].Power Conversion Conference,2003,(2):873-878.
[2]黄云鹏,赵 坤,陆 峰.轨道车辆牵引电机负载模拟系统建模及仿真[J].仿真技术,2012,5(1):161-163.
[3]Ohsawa H,Furuya T,Cao M,et al.Measurement of tractive force during acceleration and deceleration periods[J].Advanced Motion Control,2007,(4):177-181.
[4]刘 豹,唐万生.现代控制理论(第三版)[M].北京:机械工业出版社,2006.188-227.
[5]林文立,刘志刚,孙大南.基于最优粘着利用的地铁牵引电机并联控制策略[J].电工技术学报,2012,25(6):24-30.
[6]蒋大明,戴胜华.自动控制原理(第一版)[M].北京:清华大学出版社,北方交通大学出版社.2003.
[7]胡 亮.高速列车牵引传动再黏着优化控制策略研究[D].北京:北京交通大学,2015.
[8]张曙光.CRH2型动车组[M].北京:中国铁道出版社,2007.
[9]宋文祥,姚 钢,周文生,等.异步电机全阶状态观测器极点配置方法[J].电机与控制应用,2013,35(9):6-10.
