基于粒子群优化的自适应模糊制冷控制算法
2017-05-10崔辰鹏刘雪峰陈子印郝中洋
崔辰鹏,刘雪峰,陈子印,郝中洋
(北京空间机电研究所,北京 100094)
基于粒子群优化的自适应模糊制冷控制算法
崔辰鹏,刘雪峰,陈子印,郝中洋
(北京空间机电研究所,北京 100094)
为解决空间斯特林制冷机和探测器热负载不确定及存在变化的问题,提出了自适应模糊PID制冷控制;在空间环境中使用的斯特林制冷机参数会随着时间的变化而发生改变,探测器负载也会随着工作模式和工作时间的变化而变化,整个制冷系统涉及的变量多,参数非线性;采用传统的控制方法,在固定的单一条件、环境下得到的控制参数,环境和负载发生变化后容易性能变差甚至不稳定,控制精度和稳定性不能满足使用要求;设计了一种自适应斯特林制冷机控制器,通过综合自适应模糊PID控制的方法,采用粒子群优化算法调整控制参数以减小代价函数;通过仿真和试验验证算法的有效性和鲁棒性。
斯特林制冷机; 自适应; 模糊控制;PID控制; 粒子群优化
0 引言
本文涉及到的空间用斯特林制冷机模型的建立比较困难,在实际中,被控对象的数学模型是随着时间和工作环境的变化而变化[1-2]。因被控对象的工况在大范围变化的情况下,常规PID调节器需要经常进行参数调整,否则就无法达到良好的控制效果。
大量事实证明,将粒子群算法、模糊控制技术和经典控制技术相结合构成的复合控制技术在求解优化问题方面有着无比的优越性,可以达到更加理想的控制精度和控制效果[3]。采用这种复合控制技术的使用前景,具有重大的理论与现实意义。
文[4]提出了一种基于Smith预估器的模糊PID控制,文[5]对斯特林制冷机的热力动态模型进行了详细深入的研究,文[6]对斯特林制冷机直线压缩机的传递函数进行了建模。自适应PID控制方法在控制领域有很多应用,文[7]和文[8]分别是自适应PID控制在永磁同步电机和温度控制系统中的应用,参考借鉴以往的科研成果,文献[9]提出的一种高精度的制冷型红外探测器的温度控制系统,设计了一种基于自适应模糊PID复合控制策略[10],控制参数如比例、积分因子随着输入输出的控制参数变化而自动调整[11]。这种方法应用到制冷机控制中实现控制参数的自整定,提高控制系统对环境和负载特性变化的适应能力。
由于系统的稳定性和动态性能均决定于控制器参数的选择,所以采用粒子群优化算法对控制参数进行调节[12]。粒子群优化算法是现代启发式搜索算法基于群智能,能够适用于不同领域的优化问题[13],具有结构简单,算法计算代价低,性能良好的优点。可以提高系统的稳定性和动态性能。
文[14]和文[10]分别对斯特林制冷机的关键参数和热传导特性进行了详细的阐述,这种控制系统和其他制冷系统[15-19]相比具有单向只能制冷不能制热的特点,极易受到环境温度和负载的影响,控制系统的特性是动态变化的。高性能的制冷机控制系统[20]要求控温精度和控温稳定性要好,对稳定时间短,能够适应不同的控制模式实现不同温度点的闭环控制,稳态无静差,对系统特性和环境变化具有强鲁棒性,比文[21] 采用的制冷方法制冷量大、制冷温度低。
空间条件下,真空环境和热环境复杂,产品特性存在变化的系统,适应不同负载和环境的能力是衡量制冷机控制系统的重要指标之一。
基于以上思想,本文的创新点总结如下:
1)本文针对斯特林制冷机采用自适应控制算法;
2)利用粒子群优化算法调整控制器参数,提高系统的稳定性和动态性能。
本文结构如下:第二节介绍制冷机模型。第三节进行控制器设计。第四节利用粒子群算法优化控制器参数。仿真结果在第五节给出。
1 基于自适应模糊PID控制的低温制冷机控制系统
1.1 斯特林用直线压缩机数学模型
直线压缩机的单自由度模型可以用以下微分方程[6]来描述:
活塞运动方程:
(1)
电磁系统方程:
(2)
式中,mc为运动振子质量,x为活塞位移,f为等效阻尼系数,Ac为活塞截面积,Pc为气缸内气体压力,K为机械弹簧刚度,H为磁感应强度,l为线圈长度,I为线圈电流,PAV为活塞背压,L为线圈自感系数,R为线圈电阻,U为输入电动势,Uind为感应电动势。
将气体力与弹簧力合在一起得到一个综合弹簧系数 ,振子质量产生的重力与其它作用力相比很小可以忽略,活塞运动方程可表示为:
(3)
1.2 直线压缩机传递函数
制冷机直线压缩机的输入电压和活塞之间的关系可以用传递函数的形式表示出来。
对式(2)和式(3)等式两边进行拉氏变换可得:
LsI(s)+RI(s)=U(s)-HlsX(s)
(4)
mcs2X(s)+fsX(s)+KzX(s)=HlI(s)
(5)
求解以上方程组可得传递函数:
(6)
根据式(4)和式(5)的输入、输出关系建立如图1的传递函数方框图。

图1 直线压缩机传递函数方框图
由以上建立起输出驱动电压和活塞运动距离之间的关系,根据文献[5]、[22],使用特定制冷机机械参数、充气压力等参数和制冷机焦面温度之间的测试数据,得到活塞运动位移和焦面温度之间的关系,以经验公式的形式存储。加入图1中,形成温度闭环。
2 自适应模糊PID控制系统
空间斯特林制冷机控制应用中采样周期不定,而且控制算法的计算周期是变化的,同样的算法在反馈参数不同时计算时间可能不同。探测器和制冷机在空间环境下存在性能退化的现象,热负载和环境存在变化,制冷系统迟滞时间长,传统的控制方法难以实现稳定控制。设计一种自适应模糊整定系统,对传统PID算法进行改进,对反馈的温度信号和目标温度求差,按照设定的模糊规则,以温度差值以及差值变化量为输入,实现比例、积分、微分参数的自适应调整[21-23]。
设定当前温度信号和目标温度差值为e,差值变化为ec,按照一定控制律对比例Kp、积分Ki、微分Kd参数实时自适应调整,模糊PID控制器结构框图如图2。

图2 模糊PID控制器结构框图
控制系统以温度差值以及差值变化量为输入, 比例Kp、积分Ki、微分Kd的调整规则即模糊矩阵如表1~3所示。

表1 Kp整定原则

表2 Ki整定原则

表3 Kd整定原则
设“NB,NM,NS,Z,PS,PM,PB”为”-3,-2,-1,0,1,2,3”,根据e和ec,按照模糊规则按照式(7)对比例Kp、积分Ki、微分Kd参数进行调整。
kp=kp0+Δkp,ki=ki0+Δki,kd=kd0+Δkd
(7)
PID参数自适应调整工作流程如图3所示。

图3 模糊PID工作流程图
3 基于粒子群的模糊PID参数优化结构
粒子群优化算法,是美国电气工程师Eberhart和社会心理学家Kennedy在1995年提出的,是一种提出时间较晚相对较新的优化算法。粒子群优化算法中的每个粒子都是优化问题的一个解,粒子通过迭代找到最优解实现对参数 优化[24]。粒子群算法的原理简单容易理解,优化设置的初始参数较少,整体收敛速度较快,是一种实现方便的优化算法,已经逐步成为智能优化领域的研究热点。
3.1 粒子群优化
粒子群在优化算法中处于遗传算法和进化规划之间,是一个非常简单的能够有效优化各种函数的算法。粒子群算法运用的是速度和位移的方法,算法本身思想直观,相对于遗传算法和进化规划来说比较简单容易实现。
系统的控制性能不仅受到模糊规则的影响,还与控制器量化因子和比例因子的大小有关。
本文设计的基于粒子群的模糊PID控制器基于这种思想,通过粒子群算法对模糊PID控制器的量化因子Ke、Kec和比例因子K1、K2、K3进行参数优化[25]。基于粒子群优化算法的模糊PID参数优化结构框如图4所示。

图4 基于粒子群的模糊PID优化结构图
基于粒子群的模糊PID参数优化步骤如图5所示。

图5 粒子群优化模糊PID流程图
粒子群优化模糊PID参数的具体实现过程:
1)粒子群优化算法初始化。待优化的参数分别是量化因子Ke、Kec和比例因子K1、K2、K3,所有本粒子群优化维数为5;设定本文的惯性权重ω在[0.9, 0.4]之间线性下降;速度限幅vmax为粒子范围的0.1~0.2倍;为了便于优化,本文采用30个粒子,50次迭代,初始的搜索空间设置在已知数据的上下空间内。
2)适应值计算。在本文的粒子群算法中,适应值指的是每个粒子的控制性能指标,通过指标来优化量化因子和比例因子。对于PID控制器,典型的控制系统的动态性能指标包括上升时间、峰值时间、超调量、调节时间和稳态误差等。这些指标只能体现某一性能方面,而不能综合体现控制器的性能。综合性指标包括ISE、IAE、ITAE、ISTE等。本文对斯特林制冷机的自适应PID控制器的参数优化,采用的指标为ITAE指标[26],即时间与绝对误差乘积积分指标,它能够综合体现系统的偏差和时间之间的关系,其值越小越好,表达式可描述为:

(8)
3)粒子群的更新和停止。有图5可以看出,整个优化过程主要分为两个部分,一个是粒子群算法的步骤,另一个是Simulink模型,两者之间相互合作。粒子群算法产生粒子并交给Simulink模型产生适应值结果,然后将适应值结果传给粒子群算法进行计算。当粒子群算法满足终止条件,即达到最大迭代次数或者达到设定的性能指标时,算法终止。将计算得到的量化因子和比例因子作为模糊自适应PID控制器的参数输入到仿真模型当中,输出仿真图形。
本节采用粒子群优化算法对控制器参数进行调节,减少迭代次数和时间,采用控制系统常用时间绝对误差积分的评价形式:

(9)
其中:T仿真时间,系统误差e,误差变化率ec。
粒子群的粒子的位置和速度的更新方程如下:
(10)
(11)
其中:c1和c2为认知因子,w惯性权重,r1和r2随机函数 (0,1],x和vi分别表示粒子的位置和函数,pbesti表示当前最优值xi,gbest全局最优值。
控制惯性权重的大小,可以改变公式(10)中的第一项,改变上一个速度的影响。一个惯性权重w随着时间递减的方法将会使粒子群得到更好的寻优效果,惯性权重w线性递减公式为:
(12)
式中,wmax表示算法开始应用的最大数值,wmin表示算法最后应用的最小数值,Tmax表示设置的最大迭代次数,t表示当前的迭代次数。
4 系统仿真及结果
4.1 制冷机温度控制系统框图
基于上述控制策略,并结合制冷机实际参数,建立图6的制冷机温度控制模型[4],在此系统上进行对常规PID控制、自适应模糊PID控制方式进行比较。
由文献[27]通过拟合的方式得到直线压缩机和温度之间的近似关系,用函数F(x)标示,F(x)表示在活塞最大行程为X的输入正弦驱动电压稳定工作时,探测器内部能够稳定到的温度,单位为K。实际工程中通过测量封装在探测器中的测温二级管两端的电压,得到反馈温度,单位为V,每一个电压Vi值对应探测器内部的稳定Ti。

图6 制冷机控制器结构框图
其中:T’为目标温度,T为探测器温度。
4.2 基于粒子群的模糊PID参数优化仿真
仿真模型采用Simulink中的模块搭建结构如图5所示,粒子群优化的流程图如图7所示

图7 粒子群算法的流程图
仿真过程包括Simulink仿真模型、粒子群优化算法程序、粒子群算法与Simulink模型的连接程序三个部分。
第一部分:在制冷机自适应模糊PID控制器基础上建立粒子群寻优的系统仿真模型。在模型中加入ITAE指标部分,通过将时间与误差绝对值的乘积进行积分后得到,并设置输出端口1的输出值将作为粒子群算法的适应值。如图8所示。

图8 基于粒子群的模糊自适应PID控制系统
模糊自适应PID控制系统的子模块如图9。

图9 模糊控制系统的子模块
第二部分:在图5中,采用m文件编写连接程序表示粒子群优化算法和Simulink仿真模型的连接模块。在m文件将x(1)、x(2)、x(3)、x(4)、x(5)的值赋值给Workspace中的K1、K2、K3、Ke、Kec,将参数送入模型之中进行仿真,将得到的性能指标结果传递给粒子群部分。
第三部分:编写粒子群算法程序,在程序当中调用第二部分的仿真程序,将第二部分得到的适应值结果直接应用到粒子群算法当中。
4.3 仿真结果比较分析
4.3.1 自适应模糊控制和PID控制结果比较
采用自适应模糊控制如图9所示,参数为K1=1/3,K2=1/3,K3=1/3,Ke=0.5,Kec=30。由图10比较可知,自适应模糊PID控制的稳定性和抗干扰能力优于常规PID控制。响应阶跃温度控制命令过程中,自适应模糊PID控制和只采用PID控制算法时引起的温度超调小,能快速稳定;温度稳定控制时,外界环境温度和热负载发送变化时,自适应模糊PID控制能使控制温度快速达到稳定,波动性小,抗干扰能力强,而只采用PID控制算法的控制器受外界影响较大并且容易失稳。由此,自适应模糊PID控制响应快、稳定时间短,而且对负载变化有更好的适应能力,控制系统有很好的跟随性、稳定性和鲁棒性。

图10 自适应模糊PID控制和PID控制系统阶跃响应结果
4.3.2 粒子群优化前后自适应模糊控制结果比较
参数估计的初始值如上小节所示。采用粒子群算法寻优后得出的最优参数分别是K1=-9.1184,K2=0.3719,K3=10,Ke=-2.1612,Kec=22.3812,最优性能指标为J=645,粒子群优化过程中的适应值变化曲线如图11所示。
仿真结果如图所示,图11给出了代价函数随优化迭代次数的变化曲线,图12给出了优化迭代过程中的最优控制参数对应的系统响应曲线,表明了优化算法的有效性,优化后的控制器具有较快的瞬态响应速度,较小的稳态误差。

图11 代价函数随优化迭代次数变化曲线
将用粒子群寻优后的模糊自适应PID控制器的仿真结果与参数未优化时的仿真结果放在同一个图中进行比较,仿真输出结果如图12所示。
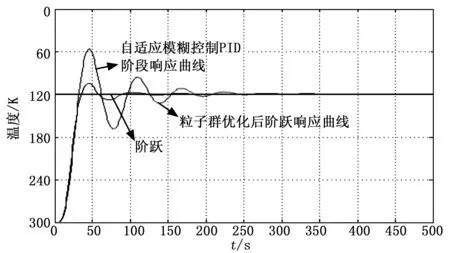
图12 粒子群优化前后模糊自适应PID控制器输出曲线
由图12中可以看到,红色曲线表示粒子群算法优化前的自适应模糊控制制冷机温度的输出曲线,蓝色曲线代表用粒子群算法优化后制冷机温度的输出曲线,绿色代表阶跃信号。两种控制方案温度最后都稳定在正常范围内的120 K,但从曲线中可以明显看出,经粒子群算法优化后的制冷机温度输出曲线具有超调量小、上升时间短、调节时间短、稳定误差小的特点,控制系统具有更加优秀的控制性能。
5 结论
本文针对斯特林制冷机的模型进行了分析,提出了一种自适应模糊PID复合控制策略,并将其应用到斯特林制冷机的温度闭环控制中去。在自适应模糊PID控制器的基础上,采用标准粒子群算法对其量化因子进行优化。结果表明,经过粒子群算法优化之后,控制性能得到明显提高。通过分析不同控制算法下系统性能,得出以下结论:
1)传统方法在系统参数变化或负载扰动情况下,控制效果不理想;
2)应用自适应模糊控制思想,设计了一种在线自整定的PID参数调整机构,无需对控制对象进行精确辨识和建模,将其应用到斯特林制冷机闭环温度控制中。实验结果验证了该策略的有效性。
3)采用粒子群优化算法对控制参数进行优化调节,保证系统的稳定性和动态性能,最后通过仿真和实验验证了控制优化算法的有效性。与传统方法相比,本文方法具有温度调整速度快、稳定性高、抗干扰能力强的特点。
[1] 闫春杰, 潘雁频, 许国太, 等, 斯特林制冷机与红外探测器耦合集成技术[J]. 航天返回与遥感, 2011, 32(2): 64-67.
[2] 金占雷, 孙启扬, 张新玉, 等, 基于辨识的低温制冷系统控制率设计方法[J]. 航天返回与遥感, 2016, 37(1):48-54.
[3] 刘 军, 朱 杰. 复杂热工过程智能控制与应用[M]. 北京: 兵器工业出版社, 2005.
[4] 杨 珂. 基于Smith预估器的模糊PID控制在中央空调系统中的应用[D]. 衡阳:南华大学, 2010.
[5] 吴卓林. 分置式斯特林制冷机的热力动态模型及仿真的研究 [D]. 合肥: 合肥工业大学, 2004.
[6] 刘向农, 唐景春, 吴 昊, 等, 斯特林用直线压缩机的传递函数法建模[A]. 低温与超导, 第九届全国低温工程大会论文集[C]. 2009:269-272.
[7] 崔家瑞, 李 擎, 张 波, 等, 永磁同步电机变论域自适应模糊PID控制[J]. 中国电机工程学报, 2013, 33: 190-194.
[8] 欧阳磊, 基于自整定PID控制器的温度控制系统研究[D]. 淮南: 安徽理工大学, 2010.
[9] 黄新栋. 制冷型红外探测器高精度制冷控温系统[J]. 红外技术, 2012, 34( 9): 547-550.
[10] 徐瑞萍, 徐烈, 赵兰萍. 粗糙表面接触热阻的分形描述[J].上海交通大学学报,2004, 38(10):1609-1612.
[11] 吴艳敏, 关英姿, 王福生, 等, 基于模糊自适应PID的转台位置控制系统设计[J]. 现代电子技术, 2008, 19:102-104.
[12] Mohd A M B, Abdul R H, Kumeresan A D.Enhanced backstepping controller design with application to autonomous quadrotor unmanned aerial vehicle[J]. Journal Intelligent Robot System, 2015,79(2):295-321.
[13] Eberhart R C, Shi Y, Kennedy J. Swarm Intelligence[D]. Morgan Kaufmann, Burlington,MA, 2001.
[14] 蔡 诗, 李 娜, 陈 曦, 等. 气动斯特林制冷机关键参数的模拟与实验[J]. 低温工程, 2014, 200(4): 51-54.
[15] Jin Y B, Shao X N, Zhuang M, et al. EAST Cryogenic supervisory and control system based on Delta-V DCS[J].Plasma Science & Technology, 2005,7(5): 3013-3016.
[16] Gomes P, Balle C, Blanco E,Casas J,et al, Experience with the String2 Cryogenic Instrumentation and Control System[A]. Accelerator Technology Department[C]. CERN, 1211 Geneva 23, Switzerland.
[17] Jin Y B, Zhuang M, Bai H Y. Preliminary design of control network for HT-7U Tokamak cryogenic system[A]. Plasma Science & Technology[C]. 2003, 5(6):2035-2038.
[18] Li G, Wang K X, Zhao J J, et al, The cryogenic control system of BEPC II[J]. Chinese Physics C (HEP & NP) , 2008, 32(4):294-296.
[19] Axensalva J, Herblin L, Lamboy J P, et al, Control system and operation of the Cryogenic Test Facilities for LHC Series Superconducting Megnets[J]. CERN-AT Department, CH-1211, Geneva 23, Switzerland.
[20] 杨宝玉, 吴亦农, 府 华, 等, 斯特林制冷机自适应主动振动控制技术[A]. 低温工程会议[C]. 2009:50-53.
[21] 张明涛, 谢仁飚, 朱 磊, 等, 320x256短波红外焦平面温控系统设计与应用[J] .红外与毫米波学报, 2009, 28(3):173-176.
[22] 陈长琦, 吴卓林. 分置式斯特林制冷机的物理模型及动态特性分析[J]. 流体机械, 2003, 31(12): 47-50.
[23] 刘金琨, 先进PID控制MATLAB仿真(第3版)[M]. 北京: 电子工业出版社, 2011.
[24] 张庭场, 耿光飞. 基于改进粒子群算法的中压配电网无功优化[J]. 电网技术, 2012, 2: 158-162.
[25] 汪阳华. 基于粒子群算法的锅炉主蒸汽压力模糊PID控制[J]. 湖南工业大学学报, 2012, 26(5): 62-66.
[26] 应明峰, 王海洋, 翟立新. 一种云自适应粒子群优化的模糊PID控制器设计[J]. 计算机测量与控制, 2013, 21(12): 3278-3280.
[27] 陈 楠. 大冷量斯特林制冷机用动磁式直线压缩机关键特性及整机性能研究 [D].上海:上海交通大学, 2007.
ParticleSwarmOptimizedAdaptiveFuzzyCryocoolerControlAlgorithm
CuiChenpeng,LiuXuefeng,ChenZiyin,HaoZhongyang
(BeijingInstituteofSpaceMechanics&Electricity,Beijing100094,China)
To solve the control problem of stirling cryocooler for space using and detector load in the present of parameter uncertainties and changes, we design an adaptive fuzzy PID method for cryocooler control. Space using stirling cryocooler parameter is changing with time and different environment, detector load is changing with working mode and working hours, the whole cooling system is a multi-variable, nonlinear control system. Traditional control method is designed in certain condition cannot fulfill the accuracy and stability with different environment and load changing. This paper puts forward an adaptive fuzzy PID controller according to the different cold quantity and types of need of refrigeration of the detector load, control parameters is realized by using fuzzy control of self-adjustment. Particle swarm optimization (PSO) algorithm is adopted to determine the optimal parameters for the controller by minimizing the objective function. Finally, the simulation and test results are presented to proof the effectiveness and robustness of the proposed controller.
stirling cryocooler; adaptive control; fuzzy control; PID control; Particle swarm optimization
2017-01-22;
2017-02-15。
崔辰鹏(1986-), 男, 河南人, 硕士研究生, 工程师, 主要从事遥感器控制技术方向的研究。
1671-4598(2017)04-0075-05DOI:10.16526/j.cnki.11-4762/tp
TP
A
