基于WiFi通讯的磁浮车间隙传感器测试系统设计
2017-05-10廖海军靖永志
廖海军,靖永志,何 飞
(1.磁浮技术与磁浮列车教育部重点实验室,成都 610031; 2.西南交通大学 电气工程学院,成都 610031)
表1 LabVIEW与间隙传感器间通信协议
基于WiFi通讯的磁浮车间隙传感器测试系统设计
廖海军1,2,靖永志1,2,何 飞1,2
(1.磁浮技术与磁浮列车教育部重点实验室,成都 610031; 2.西南交通大学 电气工程学院,成都 610031)
针对磁浮车间隙传感器工作环境恶劣需要频繁地测试与维护的问题,应用无线通讯技术、虚拟仪器技术、数字信号处理技术,设计了一种基于WiFi通讯的磁浮车间隙传感器测试系统,该系统在原有磁浮车间隙传感器的基础上增加WiFi模块使传感器具有无线通讯功能,采用具有WiFi通讯功能的便携式PC机作为系统的监控终端,利用图形化编程语言LabVIEW编写监控终端的人机交互界面;测试结果表明:该系统工作稳定可靠、操作简便,实现了对间隙传感器特性的无线测试、存储、分析和非线性校正,非线性校正后的间隙传感器具有良好的线性特性,其输入输出特性达到了磁浮车悬浮控制系统的要求,可用于悬浮控制系统的闭环控制。
磁浮车;间隙传感器;WiFi;无线通讯;LabVIEW;非线性校正
0 引言
悬浮间隙传感器是磁浮列车悬浮控制系统的重要组成部分,它将采集到的悬浮间隙大小变换为电信号提供给悬浮控制器,悬浮控制器通过调整电磁铁线圈中的电流大小使轨道与悬浮电磁铁之间的间隙保持在10 mm左右[1]。悬浮控制系统要求传感器在0~20 mm范围内都保持较好的线性特性,然而传感器原始特性曲线常常呈现出非线性或者只在小范围内具有线性特性,同时传感器安装于列车底部,工作环境恶劣,需要经常对传感器进行性能测试与维护。WiFi是一种高频无线电信号,具有传输速度快抗干扰强的优点,随着无线通讯技术的发展,无线传感器检测技术在不同领域得到了广泛的应用。文献[2]将WiFi技术应用到煤矿井的生产环境监测中,文献[3]在嵌入式视频采集中采用WiFi技术取得了不错的效果。LabVIEW即实验室虚拟仪器集成环境,使用LabVIEW功能强大的图形编程语言能够大大缩短编程周期,文献[4-5]利用LabVIEW在水质监测系统和钢轨打磨试验台测控系统中实现了监控终端人机交互界面的设计,达到了实时采集、直观显示采样数据的要求。本文将WiFi技术与LabVIEW应用到磁浮车间隙传感器的测试中,设计了一种基于WiFi通讯的磁浮车间隙传感器测试系统,实现了对磁浮车间隙传感器特性测试及非线性校正。
1 测试系统总体方案设计
磁浮车间隙传感器测试系统如图1所示,系统由监控终端PC机、间隙传感器和电机驱动部件构成。监控终端PC机具有无线WiFi通讯模块,主要实现人机接口与无线通讯功能;间隙传感器主要由WiFi模块和DSP控制单元组成。当执行特性测试时,PC机通过WiFi发送测试命令给DSP,DSP控制步进电机驱动传感器探头均匀地移动,探头检测间隙的大小并通过信号调理单元将表征间隙大小的电压信号送给DSP进行A/D转换,DSP将转换后的数字量通过WiFi发送给PC机,在监控终端的LabVIEW界面中绘制传感器原始特性曲线并将数据保存;当执行校正时,监控终端发送校正命令及校正参数给DSP,传感器更新非线性校正参数,再次测试,LabVIEW显示校正过后的特性曲线。

图1 磁浮车间隙传感器测试系统结构图
2 间隙传感器硬件设计
间隙传感器采用DSP作为核心处理器,主要实现信号采集与处理、电机驱动控制、非线性校正等功能,同时DSP通过WiFi模块与监控终端实现数据与命令的双向无线传输。
2.1 DSP控制单元
DSP在数据处理和电机控制方面应用广泛,选用TI公司的TMS320F28335作为核心处理器,28335是一种浮点型处理器,具有运算精度高的特点[6]。TMS320F28335片内集成2组8通道12位的ADC,在精度和采样速度要求不是很高的情况下片内ADC模块完全能胜任,由于DSP的输入电平不能超过3.3 V,在进行A/D转换之前需要加入相应的调理电路,信号经调理之后方可接入DSP,DSP的SCI是具有接收和发送两根信号线的异步串口,实现与监控终端的数据通讯。
DSP主要实现步进电机控制、模数转换、更新校正参数和通讯控制等任务,DSP通过接收监控终端的命令判断要进入的工作状态。DSP的工作流程如图2所示,当接收到特性测试命令时,DSP先控制电机将传感器探头调至0 mm处,然后控制探头从0 mm开始每0.1 mm均匀移动直到20 mm,探头检测间隙的大小并通过信号调理单元将表征间隙大小的电压信号送给DSP进行A/D转换,DSP将对应标准间隙的数字量发送给监控终端;当DSP接收到校正命令时,DSP接收监控终端发来的校正参数进并行参数更新;再次测试时DSP将校正后的结果输出。

图2 DSP工作流程图
2.2 WiFi模块与DSP接口
WiFi技术在无线通讯领域应用较广泛,WiFi模块是一种基于Uart与Spi接口的符合无线网络标准的嵌入式模块,模块内置网络协议IEEE802.11b/g/n协议栈以及TCP/IP协议栈,能够实现用户嵌入式设备数据到无线网络的转换,传统的嵌入式设备也能轻松接入无线WiFi网络[7]。WiFi模块可以配置为AP-Server/Client模式或者STA-Server/Client模式,目前绝大多数便携式PC机都内置WiFi模块,这使得PC机可以方便连入WiFi网络,本文将WiFi模块配置为AP-Server模式,监控终端可直接连入WiFi模块的网络与间隙传感器通信。
TMS320F28335的SCI串行通信TXD/RXD管脚电平与WiFi模块的UART_RXD/UART_TXD管脚电平都为3.3 VTTL电平,故不需要额外的电平转换芯片,按照收/发、发/收的原则相连即可,DSP串口转WiFi通讯时的电路连接如图3所示,nReload与nRset为模块的重启与复位引脚,均为低电平有效,分别接5~10 K的上拉电阻。
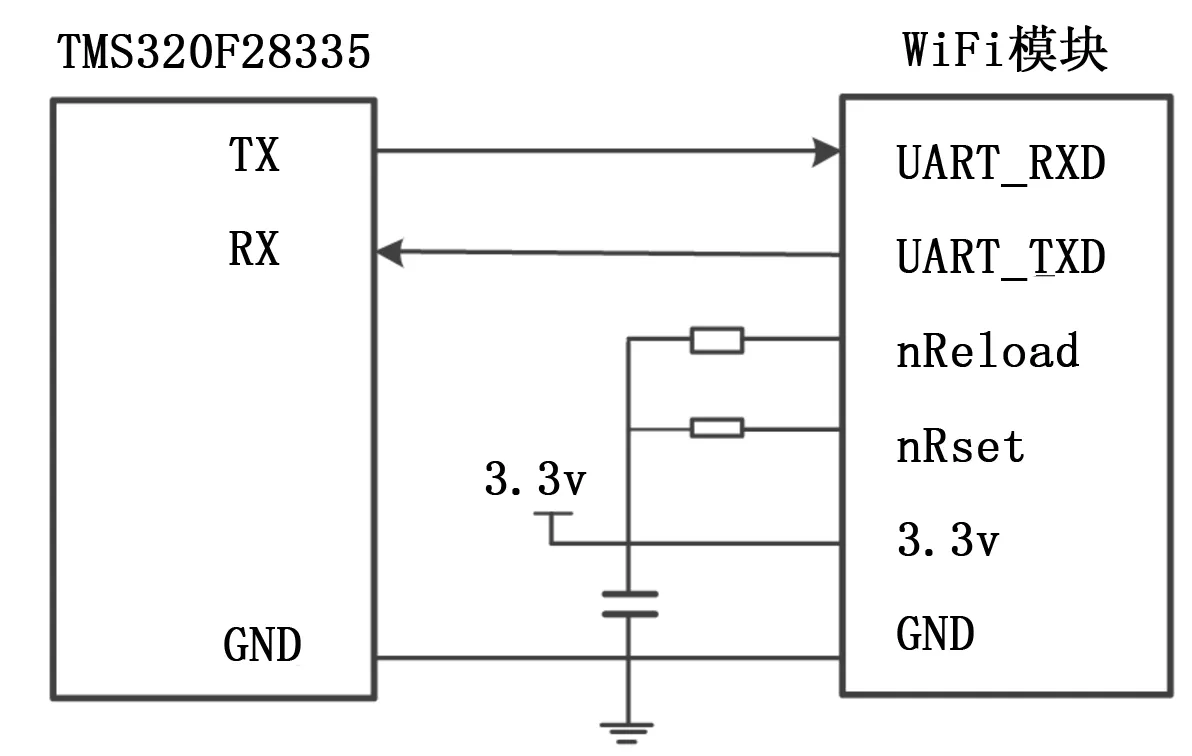
图3 DSP与WiFi模块电路连接图
3 LabVIEW监控软件设计
监控终端采用LabVIEW进行开发,LabVIEW采用独特的图形化G语言编程模式,能极大缩短开发周期,降低开发难度。LabVIEW内置了便于应用TCP/IP软件标准的库函数,通过调用TCP协议函数中的打开TCP连接、写入TCP数据、读取TCP数据等相关函数即可方便写入和读取数据[8]。调用打开TCP连接函数建立监控终端与间隙传感器间的通信,同时由于在0 mm与20 mm处安装有限位装置,调用读取TCP数据函数读取限位装置的状态,程序框图如图4所示。编写程序之前需设计LabVIEW与间隙传感器之间的通信协议,即控制电机正反转、停止指令的协议,DSP串行通信数据宽度为8位,由于该系统电机控制指令较少,使用数据的低2位即可满足要求,通信协议如表1所示,当触发0 mm限位装置时LabVIEW自动发02(反转)指令,触发20 mm限位装置时发03(停止)指令,电机控制部分的程序如图5所示。

图4 限位装置状态读取程序框图
表1 LabVIEW与间隙传感器间通信协议
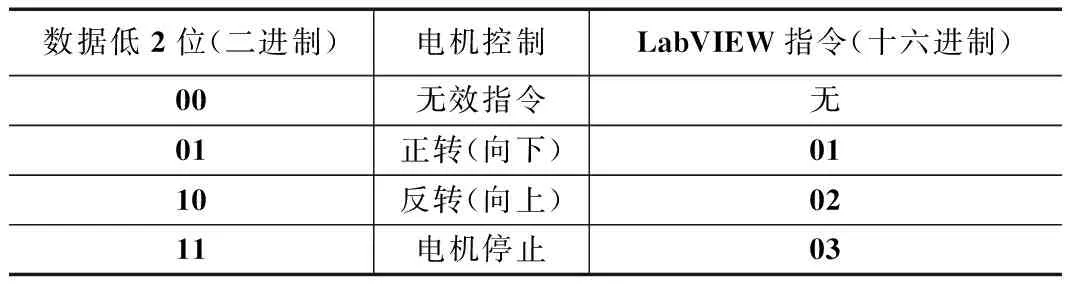
数据低2位(二进制)电机控制LabVIEW指令(十六进制)00无效指令无01正转(向下)0110反转(向上)0211电机停止03
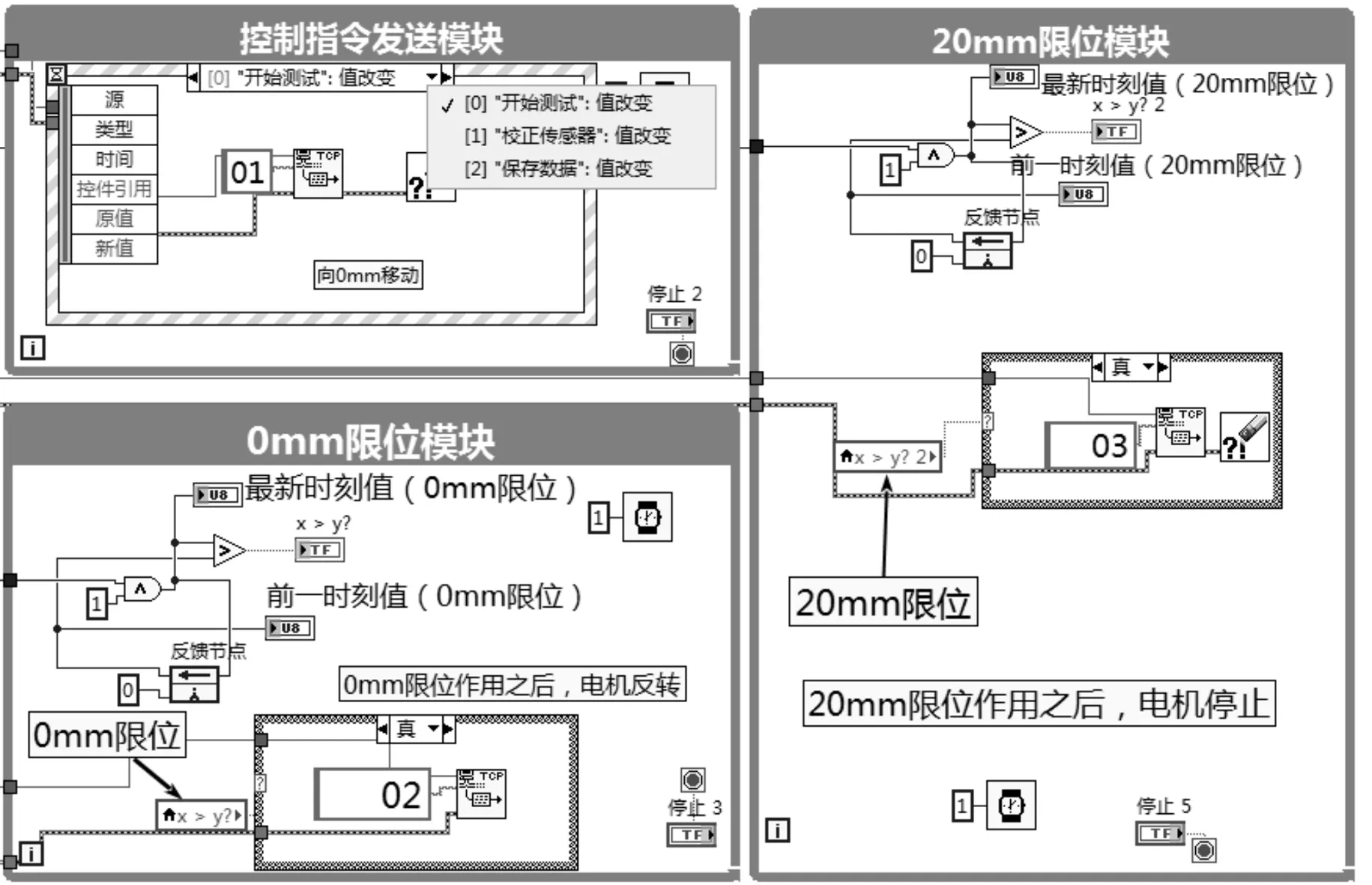
图5 电机控制程序框图
LabVIEW程序工作流程如图6所示,系统启动时输入WiFi模块的IP地址与端口号并建立监控终端与传感器之间的连接。点击开始测试按钮,写入TCP数据函数将测试模式命令通过WiFi发送给传感器的DSP控制单元,DSP运行测试模式程序并向监控终端发送数据,LabVIEW通过读取TCP数据函数来读取DSP发来的数据,同时将接收的数据波形绘制在人机界面中,点击数据保存按钮可将传感器特性数据存储在本地文件中;点击校正传感器按钮,LabVIEW将校正模式的指令和校正参数发送给DSP控制单元,点击开始测试按钮采集非线性校正后的传感器特性数据。

图6 LabVIEW程序基本流程
4 实验验证
将WiFi模块配置在AP模式,配置模块IP地址为10.10.100.254,端口号为8899,运行监控终端软件点击连接至传感器建立连接,点击开始测试,PC机发送测试命令,DSP先控制电机将传感器探头调至0 mm,然后从0 mm至20 mm采集间隙传感器的原始特性并通过WiFi模块将数据发送给PC机,监控程序接收数据并绘制特性曲线,测试结果如图7所示,图形的横坐标为实际气隙值,纵坐标为DSP的A/D模块数字量输出。
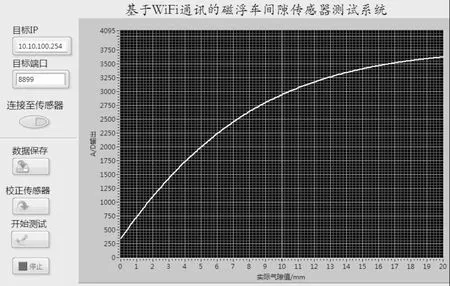
图7 传感器原始特性曲线
假设传感器的输入输出特性满足函数y=f(d),d为实际气隙值,y为A/D输出,由图7可以看出y为d的非线性函数,只有通过非线性校正环节改善其输入输出特性才能用于悬浮控制系统的闭环控制,点击校正传感器按钮,程序通过WiFi将校正参数下发给DSP,DSP更新非线性校正环节中的参数。重新采集0~20 mm数据,传感器输出非线性校正后的间隙值,其测试结果如图8所示,经非线性校正环节之后,纵坐标为传感器的模拟量输出,曲线的增益和偏置几乎严格接近于1,可见经校正后传感器的输入输出保持严格的线性特性,系统实现了对磁浮车间隙传感器特性的无线测试和非线性校正,达到了磁浮车悬浮控制系统的要求,可将输入输出特性应用于悬浮控制系统的闭环控制。

图8 校正后传感器特性曲线
5 结束语
本文将LabVIEW与WiFi无线通讯技术结合,用于磁浮列车间隙传感器的测试,所设计的测试系统具有操作简便、无线通讯和自动化程度高的特点,利用友好的人机界面可较好的实现磁浮列车间隙传感器的无线测试和非线性校正功能,经测试系统校正后传感器具有良好的线性特性。
[1] Jing Y Z, Xiao J, Zhang K L. Compensation of gap sensor for High-speed maglev train with RBF neural network[J].Transactions of the Institute of Measurement and Control,2013,35(7):933-939.
[2] 贾 颖,邵广贤,邓思敏,等.基于WiFi 技术的井下环境监测系统设计[J].煤炭技术,2015,34(4):314-316.
[3] 秦梦阳,陈小平.基于WiFi传输的电梯视频采集器设计[J].电子设计工程,2016,24(2):146-148.
[4] 赵小强,刘云云,等.基于LabVIEW的水质监测中心软件设计[J].计算机测量与控制,2015,23(12):4240-4245.
[5] 张 湘,郭育华.基于LabVIEW的钢轨打磨实验台测控系统设计[J].测控技术,2015,34(6):41-44.
[6] 刘雪超,吴志勇.基于TMS320F28335的步进电机控制模块设计[J].仪表技术与传感器,2011(10):78-79.
[7] 陈 祥,龚鑫宇,吴占敖,等.基于WiFi技术的医嘱执行实时自动提醒系统设计[J].软件导刊,2015,14(5):87-89.
[8] 姚 娟,张志杰,李丽芳,等.基于LabVIEW和TCP的数据采集系统设计与实现[J].电子技术与应用,2012,38(7):72.
Design of Test System for Maglev Train Gap Sensor Based on WiFi Communication
Liao Haijun1,2, Jing Yongzhi1,2,He Fei1,2
(1.Key Laboratory of Magnetic Suspension Technology and Maglev Vehicle, Ministry of Education, Chengdu 610031, China;2.School of Electrical Engineering, Southwest Jiaotong University, Chengdu 610031, China)
Aiming at the problem of frequent test and maintenance on gap sensor of Maglev train, using wireless communication technology, virtual instrument technology, digtal signal processing technology, a test system based on WiFi communication was designed, Wireless communication was realized by adding a WiFi module to the gap sensor in this system. PC with WiFi communication function was adopted as monitoring terminal and the man-machine interface was programed by LabVIEW. The test result shows that the system is stable, reliable and easy to handle. The system can realize the wireless test,storage,analysis and non-linear correction on gap sensor. The linearity of the calibrated gap sensor can meet the requirement of the suspension control system and it can be used in the closed-loop control of the suspension control system.
maglev train; gap sensor ; WiFi ; wireless communication; LabVIEW; non-linear correction
2016-11-05;
2016-11-28。
国家自然科学基金资助项目(51377004);中央高校基本科研业务费专项资金资助项目(2682015CX029)。
廖海军(1993-),男,重庆奉节人,硕士研究生,主要从事磁浮列车和传感器技术方向的研究。
1671-4598(2017)04-0018-03
10.16526/j.cnki.11-4762/tp.2017.04.006
TP212;TP274.2
A
