基于MOOG/SDK的多通道静力加载控制系统设计
2017-05-10侯京锋张梦妍
张 静,刘 洁,侯京锋,韩 澈,张梦妍
(北京强度环境研究所,北京 100076)
基于MOOG/SDK的多通道静力加载控制系统设计
张 静,刘 洁,侯京锋,韩 澈,张梦妍
(北京强度环境研究所,北京 100076)
针对目前国外静力加载控制软件价格昂贵且不能二次开发的问题,设计了多通道静力加载控制软件,该软件基于MOOG硬件平台,以LabVIEW软件为开发语言研制,详细阐述了基于SDK接口函数的主要功能的关键技术实现方式,如硬件连接、信号标定、安全保护、试验加载和自动寻位等功能;结果表明,控制软件满足静力加载试验的功能需求,能够提高静力加载试验水平,为其他相关软件开发提供参考。
静力加载;多通道;控制软件;SDK;LabVIEW
0 引言
静力加载,是用试验的方法观察和研究结构或构件在静载荷作用下的强度、刚度、稳定性以及应力和变形分布情况,它不仅是验证结构形式的合理性和结构静力分析正确性的重要手段,也为建立新的分析模型和工程理论提供结构特性参数,对改进结构设计减小结构质量与提高产品可靠性等方面均起着重大作用。在国防军事和航空、航天等许多领域中都有广泛的应用[1-2]。
随着科学实践的深入和航空航天领域的不断发展,新材料、新设备不断的研制和开发出来,人们希望静力加载试验能够满足高精度、高响应、大负荷和多功能的要求,静力加载试验的复杂度也日益提高,因此对静力加载试验软件提出更多挑战[3-5],现有的静力加载软件多为国外研制开发,价格昂贵且在特殊需求方面不可能为国内研究开发新的功能,使得新的试验开展受到限制。
穆格(MOOG)公司的STX控制器,是目前市场上控制特性扩充最好的独立控制器,其提供的SDK(Software Development Kit)软件开发工具包,具有独特的带“阻尼”功能控制算法实现闭环控制,具有极好的稳定性,还具有一系列的安全保护模块及安全策略,能最大程度保护试验安全[6-7],并且提供功能完备的程序开发工具包,为用户开发需要的静力加载软件和进一步扩充以实现各种期望的功能提供可能性。
本文针对多通道静力加载试验的实际需求,结合MOOG/STX硬件及其SDK,开发了多通道静力协调加载控制软件系统,用以满足静力加载试验的需求,提高静力加载试验水平,同时方便进行系统升级,满足特殊试验的需求。
1 控制系统组成
多通道静力协调加载控制系统,由上位机及下位机组成,下位机由MOOG实时控制器(可实现2500 Hz闭环控制)和非实时(VXWorks计算机,完成加载谱协调)两个部分组成。MOOG STX实时控制器,主要由控制器SMC,其内插通道闭环伺服控制卡SCU,该伺服控制卡整合力、位移信号调理、采集和电流输出模块,能够完成力和位移的控制及平滑切换,下位机还包括液压子站控制接口板和数字I/O板卡等。上位机的是应用设计的顶层模块,包括实现多通道静力协调加载用户需要的的全部功能,通过以太网与控制器连接,在LabVIEW软件平台下设计开发,通过Software Development Kit软件开发工具包(简称SDK)实现对控制器相应功能的调用,上位机LabVIEW语言调用SDK函数实现对控制器及整个静力试验流程及安全保护策略的控制,如图1所示。

图1 静力加载控制器组成
2 软件主要功能及流程图
软件主体功能包括:系统设置、试验管理、加载谱设置、工况配置、执行控制以及数据存储和数据转换等功能。在软件主界面点击按钮进入对应模块进行配置。其中在工况配置模块下包含通道配置、加载谱选择和显示曲线配置等功能。软件总体结构和流程图如图2和3所示。

图2 软件总体结构图

图3 软件流程图 图4 控制器硬件资源的树形显示
3 基于MOOG/SDK的多通道静力加载系统关键技术实现
多通道静力加载软件的功能复杂,通过SDK实现的功能主要有:1)能够自动识别系统中的所有硬件,方便系统硬件扩展,满足更多通道联合静力协调加载的需求;2)位移和力信号的标定功能;3)试验安全保护策略设置;4)试验联合加载、暂停、停止等;5)自动寻位功能等。
3.1 硬件资源自动获取及实现
控制器软件具有自动识别所有连接在系统中硬件的功能,方便系统硬件扩展,满足更多通道联合静力协调加载的需求。采用SDK的API函数S_GetStations配合多次级联调用S_GetNodeChildren[8-9]的方式实现硬件资源的,将其添加到树形控件显示,显示级别可按照用户需求进行设计编写。硬件信息树形显示如图4所示。
3.2 采集信号的标定
静力加载控制器软件,具有对控制器硬件板卡的模拟输入通道进行远程标定和修正的功能,并能保存标定所设置的参数,如标定完成后不做修改,可保持不变并自动加载调用上一次设置的参数。以力和位移信号为例,标定设置界面如图5所示。

图5 力传感器和位移传感器标定界面
以力传感器标定为例,图6为力传感器标定原理框图[10],由图可以看出,力传感器信号进入控制器后经过硬件级和软件级两层标定。与SCU连接的力传感器,是一个连接有激励电压的惠斯通电桥,它能够输出以mV为单位的反馈信号。这个信号的强弱与激励电压有关,而硬件系统自带激励补偿机制,保证激励电压为10 V。为了使ADC获得最佳的分辨率,这个mV信号需要通过硬件增益来放大,以便信号在满量程时能达到±10 V。该硬件增益通过用户设定,经过初步放大之后,信号被送到ADC进行模数转换。由于放大器和ADC之间有微小的误差,系统通过对数字输出信号进行修正以获得一个更精准的信号,并将标定参数Hardware calibration gain 和Hardware calibration offset存储在SCU Flash中。反馈信号随后通过软件标定进行修正,该标定参数Transducer calibration gain 和Transducer calibration offset是通过表格的形式进行设置的,以修正传感器的非线性度。

图6 力和位移传感器标定原理框图
结合图4,用户需要根据传感器的灵敏度,选择合适的硬件增益档,保证A/D转换器不要饱和,以免信号截断。输入传感器标定证书上的标定结果,即相应的灵敏度下对应的工程值。根据上述标定原理自动计算出Transducer calibration gain 和Transducer calibration offset值并发送至控制器,同时将通道范围也发送至控制器实现物理量到工程值的转化。标定参数通过SDK SetPropertyValueList[8-9]函数发送至控制器,实现标定过程。SetPropertyValueList参数如图7所示。
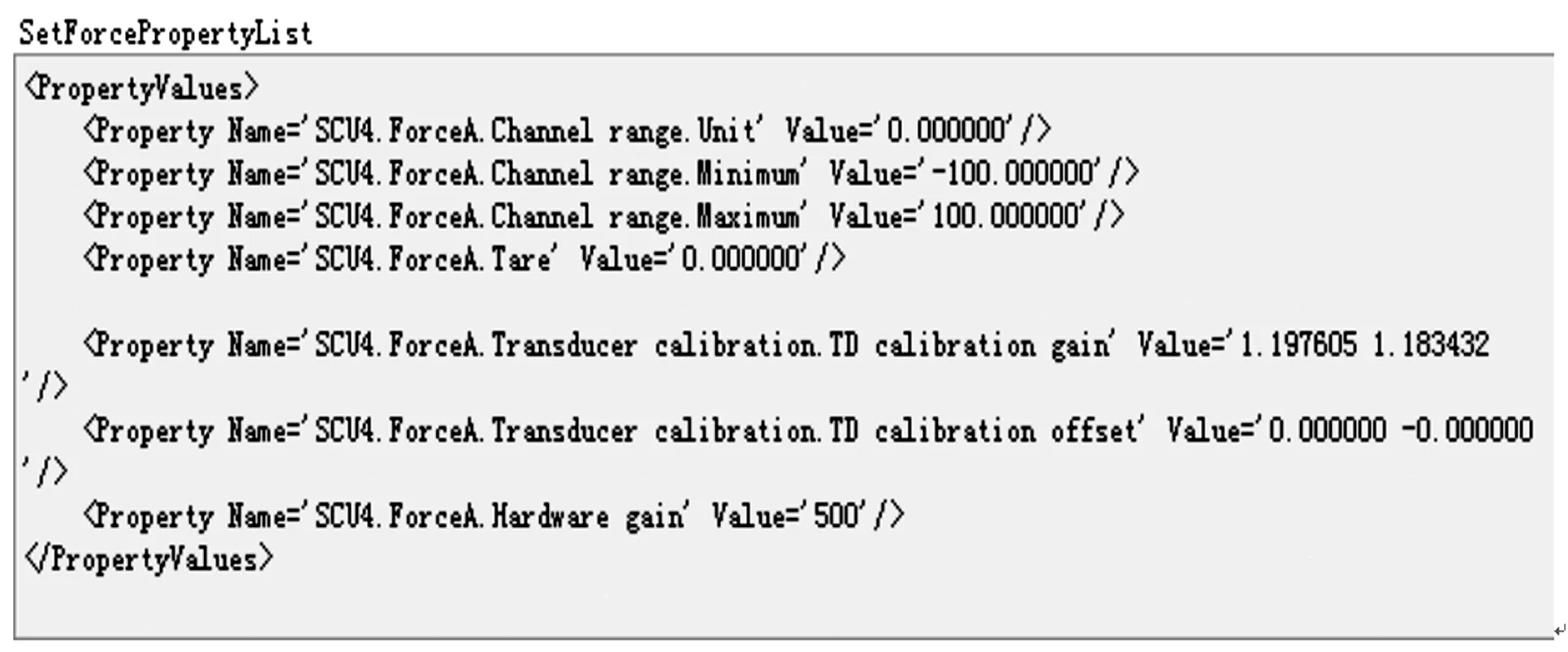
图7 力传感器标定参数
3.3 试验安全保护策略设置及实现
控制系统的安全保护权限分为三层,报警级、脚本级和液压级(紧急停止试验级)。
报警级,如果反馈信号超过了这一层极限值,就会激活一个报警窗口,提示操作员,但是试验还会继续运行。
脚本级,如果反馈信号超过了这一层设置极限值,就会激活系统运行一个名称为“FCS_controller_script”的脚本程序。默认的程序动作是在不关闭系统压力的条件下,把载荷降到初始状态“goto_rest_condition”。当然,这个脚本程序是用户根据自己的实际需要编写的,但要符合ruby语法规则。
液压级(紧急停止试验级),如果反馈信号超过了这一层极限设置值,SCU控制器的安全限的SCU_on_request信号就会置低,系统会在最短的时间内卸除液压系统的压力,SCU也会变为OFF状态。
控制软件的三级安全设置如图8所示。
报警级和脚本级保护的实现,需要通过SDK函数SetPropertyValue[8-9]实现,设置inPropertyName 为Script alarm action属性,其中0=无动作(默认);1=显示报警;2=移动到park;3=移动到ride;4=执行路径指示的脚本,报警级设置其inValue属性值为1,脚本级设置其inValue属性值为4[4],对于报警级而言,如此设置即可实现;但对于脚本级,还需要用户编写符合语法和功能要求的脚本程序,验证可以执行后,命名为FCS_controller_script.scr,当应用程序初始化与连接建立之后,通过FtpLogin[8-9]函数登录到控制器,属性inUsername为fcs,inPassword为fcsworks,然后通过FtpPutBinaryFile[8-9]将脚本程序下发到控制器指定调用的位置。液压级保护可通过当设置的值触发后,自动执行failsafe命令,卸除液压系统的压力实现。
3.4 试验联合加载、暂停和停止功能实现

图8 控制器安全参数设置
多通道静力协调加载,是为满足大型静力试验而设计。首先需要通过上位机编写符合控制器接口形式的多通道加载谱,其次要通过SDK下发至控制器,才能完成试验操作人员要求的加载谱。试验过程中,可根据控制效果随时调整PID控制参数。
实现过程如下,首先通过LocalFilenameToUri[8-9]将上位机的路径转化为LoadSequence[8-9]函数可以正确加载的路径格式,另外STX控制器默认加载的谱为相对谱,而静力加载一般为绝对值,所以要做相应的谱处理,将相对谱转换成绝对谱,通过PlaySequence[8-9]运行加载谱,StopSequence[8-9]可停止加载谱的运行,再使用goto Restconditon函数实现停止到restcondition值,实现停止功能。
试验中,如果需要暂停加载,则需要停止在点击时刻的加载谱值上不动,或者在进行单步调节时停止在当前值不动,为实现该功能,首先将Simulation application.Sequence fading enabled 设置为false,采用StopSequence函数可实现暂停功能。

图9 多通道加载控制界面
3.5 自动寻位功能实现
在静力加载试验中,顶压式试验是其中重要的一种,顶压式试验的自动寻位流程如图10所示。在试验准备阶段,先将控制方式设置为位控方式,保证运行在并且设置相应的安全保护限,以免对试件发生意外损害。设置位控切换力控的转换条件,一般设置反馈力信号达到一定值(该值一般设置为比较小的值,液压杆刚接触试验件)时,位置控制切换到力控。如果没有自动寻位功能,操作人员需要设置多次位控单步调节的指令,缓慢接近,直到力反馈信号满足一定的条件,进行手动切换,操作起来效率不高。

图10 顶压式试验自动寻位流程
该功能通过巧妙地通过运用Breakout Force实现,Breakout Force功能是当控制系统运行在位置控制方式下,通过设置合适的正负Breakout Force值,在力反馈达到该值后可自动实现位控到力控的切换。该判断过程是以闭环控制速度进行的,所以一旦触发,转换速度很快,完全可以保证转换精度。
4 结束语
本文以MOOG的STX控制器为硬件平台,通过LabVIEW软件调用SDK 的API函数,提供了多通道静力协调加载控制软件的设计方案并给出了主要功能的关键技术的详细实现方式,软件满足多通道静力协调加载控制软件的使用要求,这为使用MOOG的控制器硬件和SDK函数开发类似控制系统提供了有益的参考。
[1] 魏生道.结构静力试验技术[M].北京:宇航出版社,1991.
[2] 江礼鹏.用于结构静力试验的电液伺服加载系统的开发与研究[D].南京:南京理工大学.2012.
[3] 董 天,张再林,胡新玲等.MOOG控制器的应用与多通道软件的设计[J].工程与试验,2013,53(1):57-60.
[4] 王大鹏,田石柱.混合编程控制的多自由度结构拟动力试验方法[J].工程抗震与加固造,2013,35(1):120-126.
[5] 田石柱,赵 桐,赵雪峰.位移保护下力-控制拟动力试验方法的原理[J].地震工程与工程振动,2002,22( 3) :37-41.
[6] Test controlller and portable test controller digital servo controller user manual[Z]. Moog.Inc,2014.
[7] PTCNodetreeManual[Z].Moog.Inc,2014.
[8] Test Controller SDK Programmers Manual v2.2[Z]. Moog.Inc,2014.
[9] Test Controller SDK Reference Manual 2.12[Z].Moog.Inc, 2014.[10] Test Controller Unit User Manual[Z]. Moog.Inc,2014.
DesignandRealizationofMulti-channelStaticLoadingControlSoftwareBasedonMOOG/SDK
ZhangJing,LiuJie,HouJingfeng,HanChe,ZhangMengyan
(BeijingInstituteofStructureandEnvironmentEngineering,Beijing100076,China)
A multi-channel static loading control system software is designed based on Moog hardware in order to deal with the issue that the software abroad is expensive and can not be-redeveloped, using LabVIEW programming language. The key technology of the main feature based on SDK interface function was introduced in detail, i.e hardware connect, signal calibration, safe protect, test load and position control under break force. The results show that the control software satisfies the functional requirements of the static loading test, which can improve the test level and provide reference for other related software development.
static loading;multi-channel;control software;SDK;LabVIEW
2016-10-25;
2016-12-01。
张 静(1984-),女,辽宁朝阳人,硕士,工程师,主要从事测控技术与系统集成方向的研究。
1671-4598(2017)04-0047-04DOI:10.16526/j.cnki.11-4762/tp
TP
A
