基于DSP的道路图像分割方法
2017-05-04郭志超李一冰李斌斌GuoZhichaoLiYibingLiBinbin
郭志超,李一冰,李斌斌 Guo Zhichao,Li Yibing,Li Binbin
基于DSP的道路图像分割方法
郭志超,李一冰,李斌斌 Guo Zhichao,Li Yibing,Li Binbin
(长安大学 汽车学院,陕西 西安 710064)
在众多灰度阈值分割方法中,大津法运算最快,效果也比较理想。为满足车道线提取的实时性要求,选择大津法作为阈值分割的基础,但大津法一般适用于对灰度直方图为双峰的图像进行阈值分割,且对噪声信号十分敏感,对灰度直方图呈现三峰以上的图像会产生错误的分割。因此首先采用均值滤波的方法消除道路图像中的噪声,为降低DSP的运算量,只选取图像中的下半部分作为阈值分割对象,同时,为了尽量避免图像灰度直方图出现三峰或者三峰以上的灰度直方图,通过大量试验,白天时将阈值范围设定为100~200,在此灰度等级范围内,道路图像的灰度直方图基本为双峰状态,分割效果比较理想。
DSP;阈值分割;均值滤波;大津法;灰度直方图
0 引 言
自动驾驶绝对是当今汽车领域最为火热的技术之一,不管是传统的汽车制造企业,还是最新入局的互联网企业,纷纷加大投资,希望研究出一种高效、可靠、安全的自动驾驶技术。其中以机器视觉为基础的车道偏离系统是自动驾驶技术中的重要环节,该系统最为核心的算法之一就是车道线的提取,为了确保车道线提取的准确性,首先对摄像头拍摄到的路面进行预处理,预处理包括彩色图像的灰度转化、噪声平滑、阈值分割和二值化等,经过预处理后的道路图像是一副只有黑白两种颜色的图像,其中车道线呈白色,车道呈黑色;接着建立合适的数学模型模拟车道线,最后通过相应的算法判断车道线在图像显示设备上的相对位置,判断出车辆是否偏移车道。
研究内容在于获得理想的预处理后的黑白图像,同时兼顾DSP(Digital Signal Processing,数字信号处理)的能力,保证车道偏离系统决策的实时性,其中重点是选择一种合适的灰度阈值分割方法。目前,比较常用的灰度阈值分割方法有最小误差阈值法、最大类间方差阈值法(大律法)、最佳阈值法和差别分析法等,其中大津法的处理速度最快,效果比较理想,但是全局的大律法对噪声敏感,对灰度直方图为三峰及以上的图像可能产生效果很不理想的阈值分割,文中在基本的大津法的基础上,进行系列改进,达到较为理想的分割效果。
1 方法及原理
1.1 目标平台
选用的目标平台为某公司生产的TMS320DM 6437,为DSP芯片ICETEK-DM6437 -B评估版,这种嵌入式设备相比传统的PC平台,具有体积小、专业性强、运算速度快和实时性强的特点,其中核心芯片TMS320DM6437为第一批支持达芬奇技术的DSP产品,32位的定点DSP,处理速度高达600 MHz[1]。TMS320DM6437具有强大的视频处理子系统模块,同时,它为用户提供了大量的外部接口,可供用户进行相关的开发拓展。
将摄像头固定在车内后视镜附近,调整好摄像头角度,使得路面图像大概占显示设备的一半左右,且处于屏幕的下半部分,为降低DSP的数据处理量,只对图像的下半部分进行处理,这样就排除了天空对阈值分割的影响,降低了图像的灰度直方图出现三峰或三峰以上的可能性。
1.2 预处理流程
预处理方法的流程如图1所示,包括图像灰度转化,均值滤波,灰度直方图分析,确定灰度等级分割范围,大津法确定阈值,二值分割。
1.3 均值滤波[2]
随着使用年限的增加,路面会产生一些不可预料的损坏,如车道线漆面的破漆和路面的点蚀等,同时,路面不是绝对平整的,因此摄像头拍摄的道路图像会存在噪声,而大津法对噪声很敏感,所以在进行图像分割前要进行滤波去噪。目前主要的去噪方法有均值滤波、中值滤波、维纳滤波和图像小波域滤波等,其中均值滤波算法简单,匀速速度较快。考虑到实时性的要求,采用均值滤波方法对道路图像进行滤波处理。
均值滤波的原理是用噪声像素点一定邻域内像素的平均值代替噪声点的灰度值。设处理前像素点(,)的灰度值用(,)表示,处理后用(,)表示,则有

1.4 改进的大津法
大津法[3]又称为最大类间方差法或otsu法,大津法所确定的阈值使得前景与背景这两类之间的方差达到最大。某个灰度等级出现的概率为
粒子个数的选择根据具体问题有所差别,粒子个数过少,优化效果和速度难于保证;粒子个数过多,计算量大以及相应的运算时间加长。因此,对于不太复杂的问题,粒子个数可以在20~40范围内进行选择。本文粒子个数设为30,惯性权重ω从0.9随迭代次数线性递减到0.5,a1=2.7,a2=1.3。

式中,为图像中像素的总数;n为灰度值为的像素个数;为图像中所有可能的灰度级,值为256。假设阈值已经选定,1是一组灰度级为0,1,2,…,的像素,2是一组灰度级为+1,…,-1的像素。首先,假设阈值为,根据式(3)求得此阈值下前景和背景之间的最大类间方差,最大类间方差为
()=1()[1()-]2+2()[2()-]2(3)
式中,1()是集合1发生的概率
如果设置=0,那么拥有值的任何像素1集合的概率为0,类似地,集合2发生的概率
2()=1-1() (5)
1()和2()分别为集合1和2中像素的平均灰度。是全局均值
(7)
(8)
将式(5)代入式(3),可以把类间方差写成
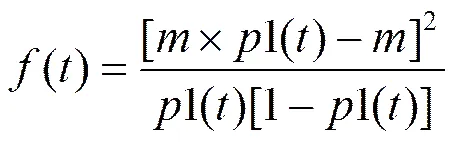
求出阈值下前景和背景之间的方差,让取0~255之间的整数值,求得256个类间方差值,选择其中最大值作为最终阈值。
2 试验结果与分析
2.1 均值滤波与未经滤波的结果对比
如图2所示,(a)为原始图像,(b)为经7×7模板均值滤波后的图像,(c)为未经滤波后的二值化图像,(d)为经7×7模板均值滤波并二值化后的图像。
由于原图中道路质量一般,路面存在点蚀以及树阴的情况,如果不经过滤波处理,得到的二值化图存在许多白斑点,不利于后续车道线的识别与车道偏离系统的决策。而从图2(b)可以看出,图像经7×7模板均值滤波处理后变得模糊,但经过二值化后,并不阻碍DSP对车道线的识别,对比图2(c)、(d),可明显发现白斑变少甚至消失,二值化后的车道线是清晰的。

(a)原图 (b)经过7×7模板均值滤波处理后的灰度图
(c)未经滤波处理的二值化图像 (d)经7×7模板均值滤波处理后的二值化图像
图2 滤波效果对比
2.2 改进后的大津法与原方法对比
为了说明改进后的大津法的优化效果,通过Matlab对一张存在高架桥阴影的图像进行试验分析,结果如图3所示,其中(a)为原始图像,(b)为使用大津法直接进行图像分割后的效果图,(c)为应用改进后的大津法进行图像分割后的效果图,(d)为原图像的灰度直方图。试验数据见表1。
表1 两个分割方法试验数据对比
分割方法阈值范围最终阈值分割效果 大津法(0,255)80很差 改进的大津法(100,200)173良好
(a)原图 (b)大津法处理的结果
(c)改进后的大津法处理结果 (d)灰度直方图
图3 改进后的大津法与原方法对比
原图3(a)中由于高架桥以及路边树阴的存在,使得图像大致形成了3块灰度聚集区,即树阴和高架桥阴影造成的低灰度值区域,路面形成的中等灰度值区域和车道线形成的高灰度值区域,这在灰度直方图3(d)上能够体现出来,灰度直方图大致形成了低、中、高3个波峰。大津法对灰度直方图呈三峰或者以上的图像处理效果不是很理想。
由图3(b)看出,直接由大津法进行阈值分割,车道线几乎无法看到,从表1可知,此时的阈值为80,通过图3(d)可知路面和车道线的灰度值均大于80,因此路面和车道线都被分在同一类,二值化后都变成白色。而改进后的大津法将阈值限定在100~200之间,在此灰度等级范围内,图像大概形成2个波峰,改进后的大津法将阈值确定为173,由改进后的大津法处理效果图3(c)可以看出,除了图像上半部分有些模糊,车道线几乎清晰可见,可以进行车道偏离系统的决策。
3 结 论
针对不同路面环境要求的路面图像分割阈值不同,提出了一种基于DSP的道路图像分割法,能够针对图像自身的特点进行自适应阈值选择和图像分割,从而提取出车道线,同时兼顾车道偏离预警系统所要求的实时性。为减少DSP的运算量,同时排除天空对路面阈值选择的影响,通过摆放好摄像头的位置,使得地面图像位于整个图像的下半部分,使整个预处理过程只针对图像的下半部分;随后将图像转化为灰度图像,进行均值滤波处理,平滑图像中的噪声,通过大量试验,确定白天情况下阈值的选择范围为100~200之间,减少图像的灰度直方图中形成三峰的几率,提高阈值选择的合理性;最后,在所设定的阈值范围内采用大津法,选择合适的阈值对图像进行分割。核心算法包括均值滤波,阈值选择范围的确定,以及最终阈值的选取。
[1]TMS320DM6437 Digital Media Processor. Texas Instruments Incorporated, 2006.
[2]马晓路,刘倩,胡开云,等. Matlab图像处理从入门到精通[M]. 北京:中国铁道出版社,2013:96-99.
[3]Rafael C, Gonzalez Richard E, Woods Steven L. 数字图像处理的Matlab实现[M]. 阮秋琦,译. 北京:清华大学出版社,2013:388-391.
2016-11-25
1002-4581(2017)02-0039-04
U491.2+22:TP274
A
10.14175/j.issn.1002-4581.2017.02.010