六自由度机械手课程设计与实现
2017-04-25卢雪梅郑艳龙白永生
许 超, 卢雪梅, 郑艳龙, 白永生
(1. 辽宁大学 物理学院, 辽宁 沈阳 110036; 2. 辽宁大学 教务处, 辽宁 沈阳 110036)
六自由度机械手课程设计与实现
许 超1, 卢雪梅1, 郑艳龙1, 白永生2
(1. 辽宁大学 物理学院, 辽宁 沈阳 110036; 2. 辽宁大学 教务处, 辽宁 沈阳 110036)
培养大学生创新创业能力是当今素质教育的重要内容,而机器人是学生工程实践的最佳载体。嵌入式课程设计设置基于现实工况下的“六自由度机械手”题目,让学生构建仿真模型、计算调整结构参数、编写控制程序、搭建机械手实物,实现具备搬运功能的六自由度机械手,符合创新性教学理念及教学与科研紧密结合,夯实了学生的理论知识,提升了学生的实践应用能力,也奠定了学校机器人创新实践平台的实验基础。
六自由度机械手; 仿真; 课程设计
伴随着即将来袭的第四次世界工业革命,以工业机器人为代表的高端自动化技术日渐成熟,其中多自由度机械手是机器人最典型的代表。机械手凭借多自由度、模块化设计等特点,被广泛应用在焊接、喷漆、搬运、物流等环境,在现代生产领域占有十分重要的地位。课题组将大学生创新创业教育与“嵌入式课程设计”课程相结合,引入机器人技术设置“机械手”专题,通过真实的工程验证培养学生的实践能力和创新能力,拓展知识结构;同时,学生也从中获取创新创业所需要的核心知识和能力。课题组基于辽宁大学单片机应用创新实验室开展嵌入式课程设计,不仅实现了实验教学建设和资源共享,而且一定程度上简化了创新实验室仪器装置的更新换代,其设计和实践的结果可为后续学生提供技术传承,实现了将创新创业教育与专业教育紧密结合[1-3]。
1 课程设计目标
课题组在“嵌入式课程设计”实验选题上立足于应用实际,服务于创新创业教学,比如选取工业生产的零件传送问题:如图1所示,红色传送带上有一个零件(绿色方块;尺寸为20 mm×20 mm×20 mm;质量为63 g),机械手的工作任务是将零件夹持起来,然后将其放到灰色固定工作台上(蓝色方块位置),以供下一步作业。已知传送带与工作台之间夹角为90°,任务要求:利用SolidWorks软件建立零件模型,通过仿真计算校核结构参数,经反复迭代确定机械手结构;根据模型零件清单购买耗材,编写程序通过串口通信实现舵机控制,最后对机械手进行组装调试[4-6]。
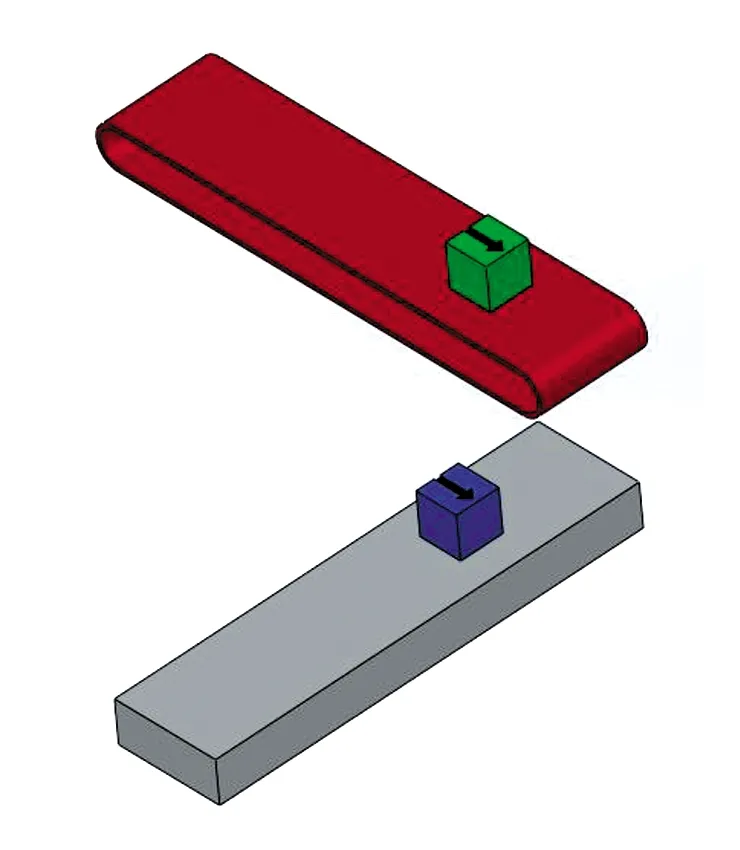
图1 实际工况示意图
2 课程设计任务
课题组规定了设计目标和任务说明,各组学生根据构思建立仿真模型,通过仿真计算调整结构参数,编写机械手控制程序,搭建机械手实物,实现具备搬运功能的六自由度机械手系统,而各组成绩完全取决于所设计和搭建的机械手系统。下面选某课程设计小组为例,给出该组课程设计任务:
根据作业要求,机械手应该具有一个底座旋转自由度、一个末端执行器动作自由度,一个末端执行器旋间只有一个连杆,并且由于转自由度和若干位姿调整自由度。当位姿调整自由度为2时,在底座与末端执行器的末端执行器需要旋转,就要求其在夹持与放置时保持竖直状态(相对于地面),这样末端执行器空间运动范围非常有限,所以决定将位姿调整自由度设定为3,这样可以覆盖较大的空间范围,也为以后的深入研究和负责工况提供了条件。基于此要求,绘制出图2所示的机构运动简图。
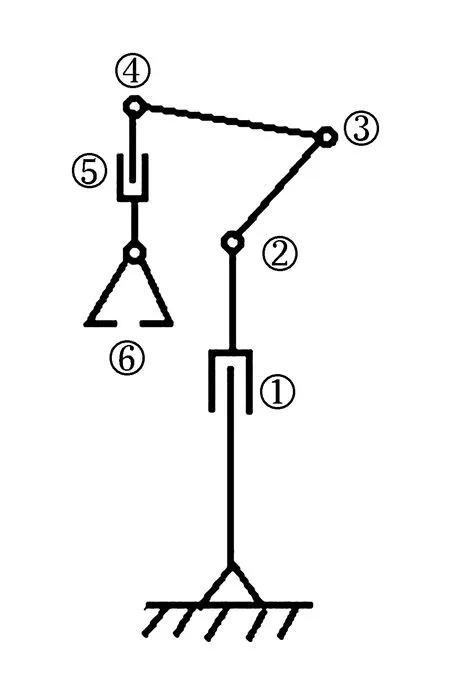
图2 整体机构运动简图
考虑到设计非标零件成本较高,所以仿真建模时选用通用零件尺寸。通用零件包括U型支架、斜U型支架、长U型支架、L型支架、舵机支架、舵盘、U型梁、夹持组件等。舵机选用MG996R型号的模拟舵机。根据设计的机构运动简图,利用SolidWorks软件建立的零件模型进行部分组装和整体模型搭建[7-9]。图3为部分和整体组装仿真模型。

图3 部分和整体机械手仿真模型
利用SolidWorks自带的测量工具进行末端夹持机构的最大夹持尺寸测量。由图3中“末端夹持机构装配体”可以看出,夹持机构的工作原理是利用一对相啮合的不完全齿轮带动2组耦合连杆使2个夹持爪相互靠近完成夹持动作的。在2个夹持爪分离过程中,不完全齿轮的最后一个齿和下侧的螺栓产生干涉,从而达到限位的目的。也就是说在不完全齿轮转动到限位位置时,夹持机构具有最大的夹持尺寸。经测量其最大夹持尺寸为30 mm,而要夹持的零件尺寸为20 mm×20 mm×20 mm,所以选用的夹持机构组件满足夹持零件的要求。
通过对机械手模型分析可知,机械手的第一个自由度即底座旋转自由度的舵机输出轴,不仅承受旋转扭矩,还要承受由其上所有组件,包括要夹持零件的重力所引起的弯矩,因此必须对舵机输出轴进行抗弯强度和刚度校核。当机械手所有关节呈水平状态时,第一个舵机输出轴承受最大的弯矩,其大小等于第一个舵机输出轴以上所有零件加所要夹持的零件的重力和。由软件计算得重力值为5.04 N,重心距离输出轴距离为180 mm。SolidWorks Simulation软件基于有限单元法对舵机输出轴进行刚度和强度校核,主要步骤包括应用材料、添加夹具、定义载荷、划分网格、运行计算、查看结果等。由结果可知,舵机输出轴最大von-mises应力(第四强度理论)为8.043 N×,而屈服极限为235 N×,应力远小于屈服极限;强度符合要求。舵机输出轴的最大位移为0.002 mm,对应的最大转角为0.0076°,可以看出,舵机输出轴的变形很小,刚度符合要求。图4为计算过程及计算结果。
机械手关节运动的驱动元件为舵机,用STC89C52单片机控制舵机控制器本质就是通过串口通信的方式向舵机控制器发送相应的指令。需要注意的是STC89C52单片机串口通信初始化函数的编写。舵机根据单片机端口所发出的PWM信号改变旋转位置。PWM信号进入舵机信号调制芯片后,获得直流偏置电压,同时与电位器的电压比较,获得电压差输出,而电压差的正负输出到电机驱动芯片决定舵机的正反转;当舵机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,舵机停止转动。
根据机械手建模、尺寸测量、刚度和强度校核等步骤得到的数据,依据SolidWorks软件建立的U型支架、L型支架、舵机支架、舵盘、U型梁、夹持组件等各种零件模型,最后装配零件完成现实工况下六自由度机械手的结构设计,如图5所示。通过机械手完成搬运实验表明,六自由度机械手结构刚度高、位姿调整灵巧,可实现现实工况下的搬运任务。

图5 六自由度机械手的仿真图和实物图
3 课程设计评价
课题组引入团队评价改革,聘请单片机应用创新实验室的指导教师作为“嵌入式课程设计”的答辩评委。学生团队答辩以PPT报告、视频、实物等多种形式展现,评委以实践过程个人权重、设计方案、结论与论据、答辩思路条理和问题回答等4项作为成绩依据,其中实践过程权重的分配根据学生按工作量与工作难度结合个体特点来确定。可以说,课题组将评价关注点从设计结果转向实践过程[10-12]。
此组学生设计的“六自由度机械手”评价如下:该课程设计是一个基于现实工况的六自由度机械手结构设计及控制方法的研究。利用SolidWorks软件进行机械手的结构设计、尺寸参数调整、刚度和强度的校核,并建立六自由度机械手仿真模型;同时,提出STC89C52单片机配合舵机控制器方式实现对机械手的控制;最后通过购买元件制作六自由度机械手并实现在典型工作环境下工作,证明其设计的有效性和可靠性。但该设计只针对传送带与工作台为固定夹角的问题进行研究,对于夹角需要改变的问题则不适用;另外该设计的机械手采用的是通用零件组装的方式,虽然成本较低,但对于安装尺寸限制较大或者动作比较复杂的情况有很大的局限性。
4 结语
将创新创业教育融入到嵌入式课程设计环节中,课题组为学生制订全新的课程培养方案,由原来的统一指定做法到学生自主拟定设计,在工程实践中培养学生的创新设计、团队协作、判断分析能力。尤其本文针对现实工况下六自由度工业机械手设计,实践表明基本达到了预期的目的。同时,课题组将嵌入式课程设计与单片机应用创新实验结合,经过教师和学生的实践运行得以证明其可行性。在实验设备和经费紧张的情况下,将课程设计与创新实验室建设相结合,不但让学生有机会参与创新创业的工程实践,同时学生的优秀设计可以服务于创新实验室建设,为以后的实验实践教学提供参考,资源得以共享。
References)
[1] 李天箭,丁晓红.创新创业教育在机械设计课程设计环节中的探索实践[J].实验技术与管理,2016,33(4):22-24.
[2] 骆德渊,秦东兴,黄洪钟.构建以“机器人”为载体的机电工程实践平台培养大学生协同创新研究能力[J].实验技术与管理,2013,30(7):201-203.
[3] 乔江艳,赵丽曼.地方工科院校学生创新创业实践能力培养的路径选择[J].长春工业大学学报,2013,34(1):54-56.
[4] 王裕清,王红旗,张高峰,等.目标物体抓取机械手的设计与仿真[J].机械设计与制造,2015(2):168-172.
[5] 王雷,刘志虎,李震,等.六自由度装配机械手设计及运动学求解[J].河北科技大学学报,2014,35(5):417-427.
[6] 高蕾娜,刘丽,唐辉阳.4自由度示教机械手构型设计与运动分析[J].实验室研究与探索,2016,35(7):44-47.
[7] 张智,邹盛涛,李佳桐,等.六自由度机械手三维可视化仿真研究[J].计算机仿真,2015,32(2):374-377.
[8] 伏冬孝.双足机器人步态规划与控制研究[D].北京:华北电力大学,2014.
[9] 陈超祥,胡其登.SolidWorks Motion运动仿真教程[M].北京:机械工业出版社,2014.
[10] 许超,吴新杰.以机器人为载体的“单片机课程设计”[J].电气电子教学学报,2015,37(2):97-99.
[11] 马宝山,刘剑桥,金国华,等.单片机应用课程设计教学改革探讨[J].实验科学与技术,2015,13(2):103-104.
[12] 金国华,刘剑桥,滕君华,等.单片机课程设计考核评价体系的构建[J].电气电子教学学报,2016,38(5):4-6.
Curriculum design of manipulator with six degrees of freedom and its realization
Xu Chao1, Lu Xuemei1, Zheng Yanlong1, Bai Yongsheng2
(1. College of Physics,Liaoning University,Shenyang 110036, China;2. Academic Affairs Office,Liaoning University,Shenyang 110036, China)
Cultivating students’ ability of innovation and entrepreneurship is an important part of the quality education besides the robot is the best carrier of the students’ engineering practice. Based on the practical working condition,the manipulator with six degrees of freedom was made as the subject in embedded curriculum design. The students should design the simulation model, adjust the structural parameters,write the control programs and build the object of the six degrees of freedom with the handling function. This curriculum design conforms to the idea of innovative teaching and represents the close combination of teaching and scientific research, which could lay a solid theoretical knowledge and enhance the practical application ability of students and lay the experimental foundation of the robot innovation practice platform in the college.
manipulator with six degrees of freedom; simulation; curriculum design
10.16791/j.cnki.sjg.2017.04.050
2016-11-01 修改日期:2017-01-04
辽宁省普通高等教育本科教学改革研究项目(UPRP20140792);辽宁大学第六批教学改革立项一般课题(JG2016YA0006,JG2016YB0032)
许超(1981—),男,辽宁义县,硕士,实验师,研究方向为信号处理和单片机技术
E-mail:xuchao@lnu.edu.cn
白永生(1978—),男,辽宁凤城,硕士,助理研究员,教务处副处长,研究方向为创新创业和教育管理.
E-mail:ysbai@lnu.edu.cn
G642;TP241
A
1002-4956(2017)4-0199-03