单片集成三轴微机电陀螺仪
2017-04-20邢朝洋赵克徐宇新北京航天控制仪器研究所北京100039
邢朝洋赵 克徐宇新(北京航天控制仪器研究所北京100039)
单片集成三轴微机电陀螺仪
邢朝洋,赵 克,徐宇新
(北京航天控制仪器研究所,北京100039)
为使陀螺仪进一步小型化、集成化,提出了一种新型单片集成三轴微机电陀螺仪,该陀螺仪采用单一MEMS结构芯片实现3个轴向角速度的测量。介绍了单片三轴陀螺仪工作方式、结构设计以及电路原理,完成了MEMS结构的流片加工,对陀螺仪表头和整机进行了测试,单片三轴微机电陀螺仪x轴、y轴和z轴零偏稳定性分别达到53.4(°)/h、70.8(°)/h和18.4(°)/h,非线性度分别为1.59×10-4、3.3×10-4和2.18×10-4。该陀螺仪具有三轴角速率检测效应,具有集成度高、体积小的优势,具有较强的应用潜力。
单片三轴;微机电;陀螺仪;零偏稳定性
0 引言
MEMS陀螺仪在近几年发展迅速,在宇航、武器、汽车、消费电子、机器人和医疗等诸多领域有着广泛应用,市场对陀螺仪的要求也越来越高。对于MEMS陀螺仪,小型化是目前重要的发展趋势。其中,多轴集成的微陀螺仪是一个重要的发展方向。
三轴微陀螺仪的集成方式可以分为3类:第一类是采用3个单轴陀螺仪进行微型化封装集成的三轴微陀螺仪,该方式是在成熟的单轴陀螺仪基础上开展的,设计和工艺技术都比较成熟,产品精度较高。国外已取得相关产品,但体积较大,如挪威Sensonor公司的三轴陀螺仪STIM202[1]和ADI公司的ADIS16365[2];第二类是在同一基板上制作2个或3个敏感结构,共用同一电路系统实现对三轴角速度的测量,如Invensense公司在2009年底推出的新款三轴陀螺仪ITG3200,封装尺寸为4mm×4mm×0.9mm,量程达到2000(°)/s,噪声0.03(°)/s/Hz ;第三类是采用一个敏感结构实现对三轴的角速度测量,国外多家研制机构开展了单片三轴MEMS陀螺仪的研究[4⁃8],产品已开始应用于消费类市场,如ST的L3G4200D[3]和VTI的CMR3000,具有低成本、体积小的特点,但目前精度还比较低。
国内对于单片三轴硅微陀螺仪的研究刚刚起步,东南大学微惯性仪表实验室报导了一种四自由度单片式三轴陀螺仪结构,给出了结构关键参数,描述了加工工艺,验证了设计的可行性[9⁃10]。
本文提出了一种新型的单片集成三轴微机电陀螺仪,属于上述第三类三轴陀螺仪。本文研究了单片三轴微机电陀螺仪的结构特点、基本尺寸、振动模态和工作方式,描述了陀螺仪表头结构的加工工艺流程,实现了三轴陀螺仪共用电路,三轴陀螺仪表头和整机测试结果表明达到了设计要求。
1 三轴陀螺仪工作原理
三轴陀螺仪采用单结构方案,如图1所示。结构由4个主质量块构成,4个主质量块通过斜梁连接。每个主质量块上带有2个小质量块,主质量块与小质量块通过H型梁连接,2个小质量块之间由横梁来连接。该结构的尺寸为 6.5mm× 6.5mm,结构各个部分关键尺寸如表1所示。

表1 三轴硅微陀螺仪主要结构尺寸(单位:μm)Table 1 Dimensions of tri⁃axis silicon MEMS gyro(unit:μm)
该陀螺仪的工作模态分别为驱动模态、x轴检测模态、y轴检测模态和z轴检测模态。三轴陀螺仪的驱动模态如图2所示。在驱动梳齿上施加带有直流偏置的交变电信号,在谐振状态下,4个主质量块在谐振频率下振动。其中,上、下和左、右2组主质量块运动相位相反。
三轴硅微陀螺仪的x轴和y轴检测模态如图3所示。当沿面内的x轴有角速度输入时,陀螺仪沿y轴分布的两个主质量块由于科氏力的作用在z轴方向作简谐振动,如图3(a)所示,主质量块的振幅与输入的角速度大小成正比关系。另一方面,主质量块与对应的检测电极组成的电容发生变化,电容变化量与质量块的振幅近似成正比,因此可根据检测电极电容变化量的大小得出x轴输入角速度的大小;同理,当沿平面y轴有角速度输入时,陀螺仪沿x轴分布的两个主质量块由于科氏力的作用在z轴方向作简谐振动,如图3(b)所示,通过y轴检测电极测出y轴输入的角速度大小。
三轴硅微陀螺仪的z轴检测模态如图4所示。当z轴有角速度输入时,8个小质量块在科氏力的作用下在平面内作简谐振动,小质量块的振幅与输入的角速度大小成正比。同样地,通过z轴检测电极电容变化量的大小,检测得出z轴输入角速度的大小。8个电容分成两组进行差分检测,可抵消共模误差的影响。
通过ANSYS软件仿真得出各个工作模态谐振频率,如表2所示。
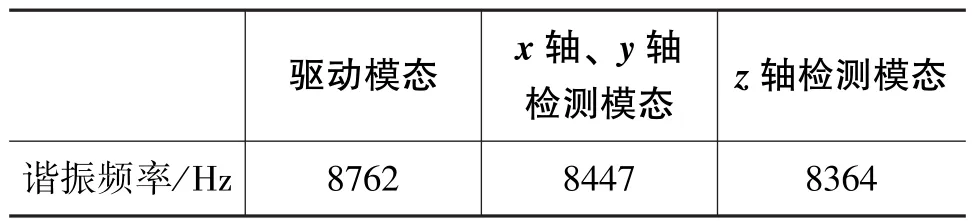
表2 三轴硅微陀螺仪各模态频率Table 2 The resonance mode frequencies of tri⁃axis MEMS gyro
2 三轴陀螺仪工艺流程
三轴硅陀螺仪采用SOG工艺加工制作,由于结构复杂,并需要兼顾3个工作频率,工艺加工难度较大,特别是对芯片厚度精度要求较高,加工中将厚度误差控制到1μm以内。加工完成的陀螺仪结构照片如图5(a)所示,梳齿结构的SEM照片如图5(b)所示。
陀螺仪结构采用器件级真空封装,芯片黏接在陶瓷管壳中,进行真空烘烤、引线键合和封帽,完成陀螺仪表头的加工制作。未封帽前的陀螺仪表头如图6所示,表头的封装尺寸为11.4 mm× 11.4 mm×2.0mm。
3 三轴陀螺仪电路原理
单片三轴微机电陀螺仪采用单驱动三方向检测的模式进行工作,因此电路结构分为1个驱动模块和3个检测模块。相比于3个单轴陀螺仪集成的方式,其电路最大限度实现公用,具有结构简单、体积小和功耗低的优势。三轴陀螺电路图如图7所示。
4 三轴陀螺仪测试
陀螺仪整机如图8所示。电路采用的是厚膜集成电路,整个样机的尺寸为51mm×41mm×6mm。之后,对陀螺仪芯片及整机进行了测试。
4.1 表头特性扫频测试
将信号发生器接入陀螺电路进行激励,采用C/V电路作为输出端进行检测,各个工作模态的扫频曲线如图9所示。并依据式(1)进行Q值计算:
式中,f0为谐振频率,f1、f2分别为半功率点频率。
从图9(a)中可以看出,驱动模态曲线较为理想,驱动谐振频率附近无其他峰值,无其他模态干扰;在图9(b)和图9(c)中,x轴、y轴检测模态曲线基本一致,表明两个模态对称性较好;图9(d)中,z轴检测模态与x轴、y轴检测模态相比,Q值较高,但谐振频率附近有其他模态的干扰。
各个模态谐振频率的仿真结果与测试结果如表3所示。从结果可以看出,仿真与测试结果之间符合度较高。
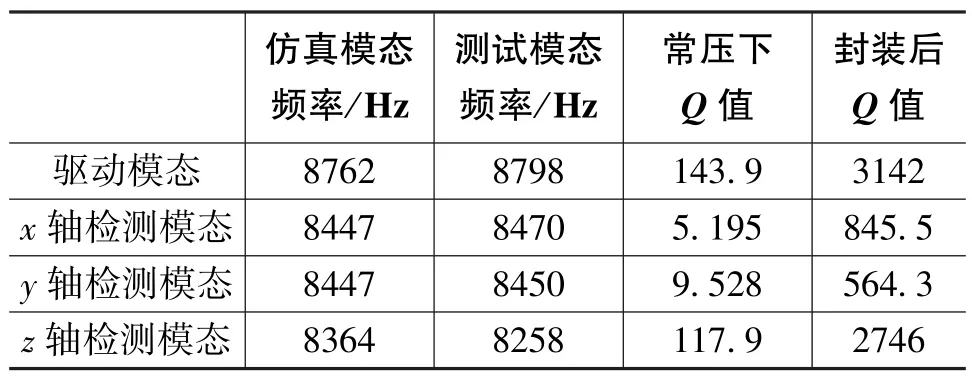
表3 三轴硅微陀螺仪各模态的仿真计算频率和测试频率Table 3 The simulating results and measurement results of tri⁃axis resonance modes
4.2 样机性能测试
(1)速率测试
对三轴陀螺仪样机进行速率测试,速率测试测试范围为±500(°)/s,速率测试曲线如图10所示。
各个轴向的标度因数分别为12.8mV/(°)/s、11.9mV/(°)/s和12.7mV/(°)/s,非线性度分别为1.59×10-4、3.3×10-4和2.18×10-4,非线性度均小于5×10-4。
(2)零位稳定性测试
采集三轴陀螺仪零位稳定性数据,进行Allan方差分析,曲线如图11所示。对该曲线运用式(2)进行拟合:
式中,τ为Allan方差的时间长度;Am为拟合系数。得到x轴的零偏稳定性为53.4(°)/h,角度随机游走为 4.72(°)/h ;y轴的零偏稳定性为70.8(°)/h,角度随机游走为6.59(°)/h;z轴的零偏稳定性为18.4(°)/h,角度随机游走为3.34(°)/h。可见,x轴、y轴输出的零偏稳定性和噪声与z轴方向相比较差。
对此陀螺仪结构,x检测轴、y检测轴工作于面外扭转振动模态与z轴面内线振动模态相比,前者对加工精度要求较高,尤其对芯片厚度的均匀性要求更加严格。又由于其阻尼为压膜阻尼,Q值较低;后者受加工工艺误差影响相对较小,且采用梳齿进行检测,表面的阻尼类型为滑膜阻尼,Q值较高。
综合以上测试数据,此三轴陀螺仪各项性能参数如表4所示。可见,该陀螺仪具备了三轴角速度检测功能,并实现了一定的精度。
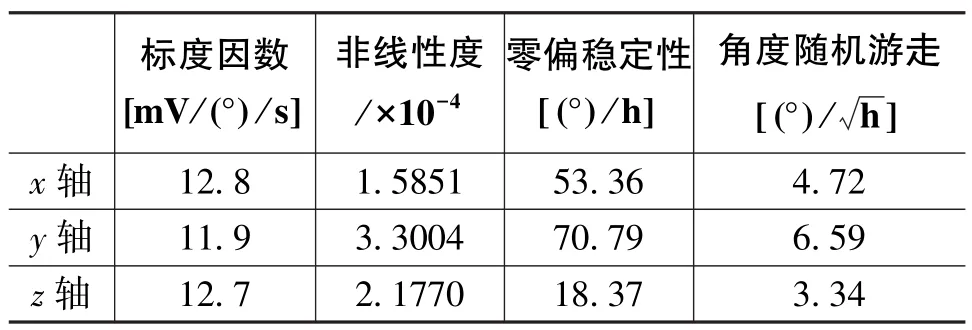
表4 整表测试结果Table 4 The measurement results of prototype performance
5 结论
本文提出了一种单片三轴微机电陀螺仪,采用单一MEMS结构芯片实现3个轴向角速度的测量,三轴陀螺仪采用 “单驱三检”的模式,最大程度实现了电路共用,经过研制,实现了具有一定的精度的样机。
从测试结果来看,单片三轴微机电陀螺仪3个轴之间的性能匹配程度还有待提高。目前该样机尺寸还较大,但由于芯片结构体积较小,具有小型化的潜力,如采用ASIC电路减小电路体积、采用圆片级封装技术可进一步减小整表体积。
[1] Sensonor Technologies A S.Stim202 Datasheet[EB/OL]. http://www.sensonor.com/gyro⁃products/gyro⁃modules/stim 202.aspx.
[2] Analog Device Inc.ADIS16365 Datasheet[EB/OL].http://www.analog.com/media/en/technical⁃documentation/data⁃sheets/ADIS16360_16365.pdf.
[3] STMicroelectronics.L3G4200D Datasheet[EB/OL].http://www.st.com/content/st_com/en/products/mems⁃and⁃s⁃ensors/gyroscopes/l3g4200d.html.
[4] Seshia A A,Howe R T,Montague S.An integrated micro⁃electromechanical resonant output gyroscope[C].Process of the 15thInternational Conference,MEMS 2002,Las Ve⁃gas,2002:722⁃726.
[5] Juneau T,Pisano A P,Smith J H.Dual axis operation of a micromachined rate gyroscope[C].Process of the IEEE 1997 International Conference,Tranducers’97,Chicago,1997:883⁃886.
[6] Tsai D H,Fang W.Design and simulation of a dual⁃axis sensing decoupled vibratory wheel gyroscope[J].Sensors and Actuators A:Physical,2006,126(1):33⁃40.
[7] Wood D,Cooper G,Burdess J S,et al.A monolithic silicon gyroscope capable of sensing about three axes simultaneously [J].IEEE Colloquium(Digest),1996(227):2/1⁃2/3.
[8] John J D,Vinay T.Novel concept of a single⁃mass adap⁃tively controlled triaxial angular rate sensor[J].IEEE Sensor Journal,2006,6(3):588⁃595.
[9] 王元山,熊敏敏,王寿荣.单片集成三轴微机械陀螺技术初步研究[J].测控技术,2005,24(10):73⁃75. WANG Yuan⁃shan,XIONG Min⁃min,WANG Shou⁃rong. Research on monolithic integrated three⁃axis micromachined gyroscope[J].Measurement&Control Technology,2005,24(10):73⁃75.
[10] 夏敦柱,孔伦,虞成.四模态匹配三轴硅微陀螺仪[J].光学精密工程,2013,21(9):2326⁃2332. XIA Dun⁃zhu,KONG Lun,YU Cheng.Four⁃mode matc⁃hing tri⁃axis silicon microgyroscope[J].Optics and Pre⁃cision Engineering,2013,21(9):2326⁃2332.
Monolithic Integrated Tri⁃axis MEMS Gyroscope
XING Chao⁃yang,ZHAO Ke,XU Yu⁃xin
(Beijing Institute of Aerospace Control Devices,Beijing 100039)
This article proposed a novel single⁃chip integrated tri⁃axis MEMS gyroscope,which was benefit for device miniature and integration.Only one chip MEMS structure was used to achieve tri⁃axis angular rate detection.Firstly,the operating principle,structure and electronic circuits of the gyroscope were introduced.Secondly,the fabrication process of silicon micro⁃structure was presented.Finally,the performances of gyroscope chip and the prototype were measured.The bias stabilities were 53.4(°)/h,70.8(°)/h and 18.4(°)/h inx⁃axis,y⁃axis andz⁃axis,respectively.The nonlinearities were 1.59×10-4,3.3×10-4and 2.18×10-4inx⁃axis,y⁃axis andz⁃axis,respectively.This gyroscope has tri⁃axis angular rate detection effect,with the advance of chip structure miniature,have certain application potentiality.
single chip tri⁃axis;micro electro mechanical;gyroscope;bias stability
U666.12+3
A
1674⁃5558(2017)02⁃01274
10.3969/j.issn.1674⁃5558.2017.02.011
邢朝洋,男,博士,研究方向为MEMS惯性仪表。
2016⁃05⁃03
