真空吸盘式多功能抓装置设计与实现
2017-03-31郑泽炜李莉纯
郑泽炜 李莉纯

摘要:真空吸盘是真空设备执行器之一,在工业生产领域中利用真空吸盘抓取制品是最廉价的一种方法。为满足现代企业中码垛机器人多种类型包装物的码垛作业要求,本文提出了一种真空吸盘式多功能抓取装置,详细的介绍其结构组成和工作原理,并对其气动系统进行了选型设计。
关键词:真空吸盘;多功能;抓取装置;设计
引言
码垛机器人是用在工业生产过程中执行大批量工件、包装件的获取、搬运、码垛等任务的一类工业机器人,它在解决劳动力不足、提高劳动生产率、降低生产成本、改善生产环境等方面具有极其重要的意义。现代企业集团化、生产能力规模化、多品种少批量的生产方式,使得码垛机器人的应用需求越来越大,与之配套的码垛机器人末端抓取装置也发展迅速,形成了多种类型。但现有抓取装置多为刚性抓取式手爪,通用性差,无法适应现代企业生产的高速化、多品种、少批量的现状。基于此,本文研究设计一种码垛机器人真空吸盘多功能抓取装置,不需要更换末端执行件,即可实现不同类型包装物以及托盘的码放需求。
1技术参数与方案设计
常见的产品包装形式主要有箱类包装、袋类包装以及桶类包装。
由于需码放的包装物品种多样,单靠夹持或抓取方式无法满足使用需求,且刚性接触易损坏包装物,因此所设计的多功能抓取装置采用真空吸盘来吸取码放包装物。真空吸盘一般是由橡胶材料等软性材料所制造,吸取或者放下不会对包装物造成任何损伤。此外不管被吸物体是什么材料做的,只要能密封,不漏气,表面致密光滑,结构牢固可靠,均能使用,通用性很强,能够满足箱类、袋类、桶类以及板材的码放需求。真空吸盘所需的真空一般有以下两种方式产生:一是由电动机、真空泵以及各种真空器件所组成的真空系统来提供,这需要一套独立的真空设备,成本较高;二是由压缩空气通过真空发生器所产生的二次真空来提供,经济方便。考虑到一般自动化生产场所大都具有压缩空气,或在不具有压缩空气的情况下投资建立一套压缩空气发生装置的成本较建立一套真空设备的成本更低,因此采取第2种方式产生真空,这只需要在多功能抓取装置上配置一套由压缩空气发生真空的装置。
对于托盘的码放,我们可以利用托盘上的叉孔,通过勾爪插入托盘叉孔后的抓放动作来实现码放托盘。但是,由于托盘尺寸相比于需码放的包装物来说一般较大,为了适应托盘尺寸,可将真空吸盘分区阵列,可一次性吸取多件包装物。
2结构组成及工作原理
在上述方案分析与设计的基础上,对真空吸盘式多功能抓取装置进行了详细的结构设计,并采用Solidworks三维软件建立了图1所示的真空吸盘式多功能抓取装置三维模型。
结合真空吸盘式多功能抓取装置的三维结构图对其结构组成及工作原理进行详细说明。
2.1结构组成
该真空吸盘式多功能抓取装置主要由主体框架、真空系统及其附件、托盘夹取系统及其附件等组成。
2.1.1主体框架
主体框架是由一组铝型材通过角铝连接件连接组成的十字形安装框架,并通过连接法兰可与码垛机器人末端相连,使真空吸盘式多功能抓取装置成为码垛机器人末端执行器。
2.1.2真空系统及其附件
真空吸盘式多功能抓取装置设有两组真空波紋吸盘吸取装置,每组共有12个真空吸盘组件,均匀分布安装在两个吸盘组件安装板上。吸盘组件安装板通过连接板固定在主体框架上,其中连接板上面设有四组安装孔,从而可以改变安装位置以实现调节两组真空波纹吸盘吸取装置之间的距离,适应不同尺寸的包装物。
2.1.3托盘夹取系统及其附件
两组托盘夹取装置通过安装板对称安装在主体框架上,每组托盘夹取装置由一对托盘勾爪、一个曲柄轴、一个连接轴以及一个动作气缸组成。动作气缸的气缸杆与曲柄轴连接,在电磁阀的控制下带动曲柄轴转动实现两个托盘勾爪的勾取和放松动作。另外,4个托盘勾爪上各附有尼龙护套,以提高托盘勾爪抓取码垛托盘时的摩擦力并防止损坏托盘。
2.2工作原理
真空吸盘式多功能抓取装置在工作前,可先根据待吸取物尺寸调节两组真空波纹吸盘吸取装置之间距离,再根据码垛托盘尺寸,通过调节4个轴固定座以及4个胀紧套来调节托盘勾爪之间的距离。动作气缸驱动4个托盘勾爪张开,待位置检测气缸确定托盘与真空吸盘距离合适时,动作气缸驱动四个托盘勾爪夹取码垛托盘,之后码垛机器人将码垛托盘放置在预设的码垛区域,动作气缸驱动托盘勾爪收回,以防止托盘勾爪影响吸取包装物。
在吸取待码包装物时,码垛机器人带动真空吸盘式多功能抓取装置下移,使真空吸盘接触待吸取物上表面并产生一定压缩量,吸盘与待码包装物表面密封,此时真空发生器工作产生负压。当压力开关检测气动回路压力达到预先设置值时,表明吸盘表面接触密封良好,真空吸盘紧紧吸住待码包装物,码垛机器人动作,将待码包装物转运到码垛托盘上并进行码垛。通过控制电磁阀换向可使正压气源连通所有真空吸盘破坏真空,令真空吸盘式多功能抓取装置放下被吸取物。往复动作即可实现产品转运码垛。
3气动系统设计与实现
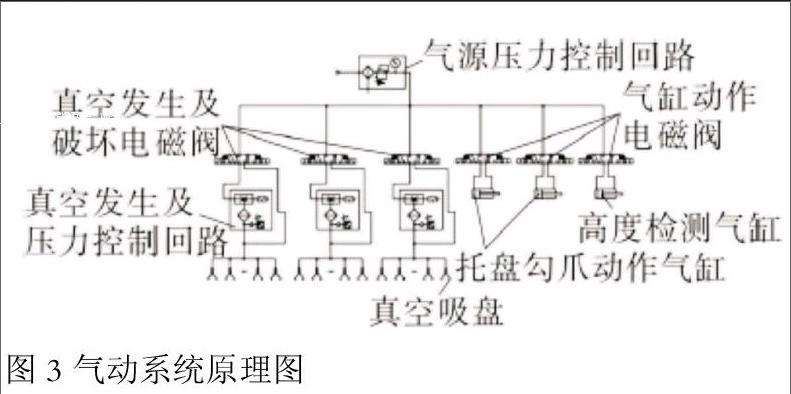
根据真空吸盘式多功能抓取装置的工作原理可设计出如图3所示的气动系统原理图。
真空吸盘式多功能抓取装置气动系统由两部分组成,一是真空吸盘系统,二是动作气缸系统。动作气缸系统中,托盘勾爪动作气缸的安装位置可调,且托盘勾爪在勾起托盘时气缸受力较小,故可综合考虑缸径及行程进行选型;托盘位置检测气缸的设计要点为气缸行程,需满足检测托盘位置保护吸盘的功能需求,可综合考虑真空吸盘式多功能抓取装置的结构尺寸进行选型设计,在此不再赘述。
真空系统中,主要部件为真空吸盘及真空发生器,二者选型成功与否直接关系到真空吸盘式多功能抓取装置能否实现其预定功能,故对真空吸盘及真空发生器进行详细设计。
真空吸盘是通过吸盘与工件之间的密闭空间内形成一定的真空度,使吸盘内外形成一定的压力差,实现吸盘吸起工件的。所设计的真空吸盘式多功能抓取装置共24个真空吸盘分为3组,根据表1包装物规格表,极限工况下,需满足单组8个吸盘能吸起20kg包装物,即每个吸盘需具有能吸起2.5kg重量的吸力。吸盘所产生的吸附力为:
式中F——吸附力/N
P——吸盘内真空度(相对压力)/kPa
A——吸盘的有效吸附面积/cm2
f——安全系数
真空度p与吸盘有效吸附面积A分别是真空发生器与真空吸盘选型的关键参数,二者共同影响吸盘吸附力的产生,可先确定其中一个参数再对另一参数进行计算。考虑真空吸盘式多功能抓取装置的结构尺寸,采用直径为5cm的真空吸盘,通常吸盘的有效吸附面积取吸盘面积的80%。真空吸盘内的真空度一般设定为真空发生器最大真空度的63%至95%,这里取80%。安全系数随使用条件而异,水平吸取时,f≥4,垂直吸取时,f≥8,这里安全系数取4。
由式(1)可计算出所需真空发生器需产生的最大真空度为:p≥F×f/0.1A=78kPa
根据上述计算结果,即可根据厂商产品资料对真空吸盘及真空发生器进行选型。所设计的真空吸盘式多功能抓取装置选用Vuototecnica品牌的真空组件,真空吸盘型号:085030MA,真空发生器型号:M18SSX(在5bar供给压力下,最大真空度可达85kPa),真空压力开关型号:122010P。
4结束语
综上所述,现代企业生产的高速化、多品种、少批量的现状和需求,设计了一种新型的真空吸盘式多功能抓取装置,该装置采用气动驱动及真空吸附设计,能吸取码放箱类包装物、袋类包装物、板材以及桶类包装物,并具有码垛托盘的抓放功能。所设计的抓取装置具有通用性强、不易损坏被抓取物、转运效率高、结构合理、方便安装和调节、成本经济等优点,能适应现代化生产需求,具有较为广阔的应用前景。
