现代有轨电车正线道岔控制系统的研究*
2017-03-27赵晓春陈光武
赵晓春 陈光武
(1.兰州交通大学自动控制研究所,730070,兰州; 2.甘肃省高原交通信息工程及控制重点实验室,730070,兰州∥第一作者,硕士研究生)
现代有轨电车正线道岔控制系统的研究*
赵晓春1,2陈光武1,2
(1.兰州交通大学自动控制研究所,730070,兰州; 2.甘肃省高原交通信息工程及控制重点实验室,730070,兰州∥第一作者,硕士研究生)
现代有轨电车正线道岔控制系统的研究,包含道岔控制模式的选择、轨旁联锁控制器的开发设计、轨旁联锁控制器设置方案及道岔区域电车定位方式的比较和选取。车载进路模式在提高效率的同时降低了司机的劳动强度。轨旁联锁控制器采用全电子化执行单元代替了有接点的继电器。联锁控制器区域化设计将集中和分散控制的优势集为一体,结构简单且投资小。组合电子标签定位克服了其它单一定位手段的缺陷。该设计方案使得现代有轨电车正线道岔控制系统的结构简单,性能安全可靠,且投资小,适合现代有轨电车的发展。
现代有轨电车;道岔控制; 联锁控制器
与地铁、轻轨相比,现代有轨电车造价低廉、运能适中,适合市区小曲线半径和大坡度运行,是我国未来城市轨道交通的发展方向之一。而100%低地板有轨电车凭借其出色的舒适性、人性化及美观度等特点,正如雨后春笋般地发展[1]。对于非独立路权的现代有轨电车,没有列车自动防护和自动驾驶的运营需求[2]。这种情况下,如何保证运营安全,提高效率,降低成本,减轻司乘人员劳动强度,是有轨电车设计的主要任务。
现代有轨电车信号系统主要包括运营调度子系统,车辆段联锁子系统,正线道岔控制子系统,道口信号子系统,通信子系统以及车载子系统等。其中,有轨电车正线道岔控制系统是现代有轨电车正线信号系统的重要而关键的一大系统[3]。因此,研究现代有轨电车正线信号系统,主要是分析设计正线道岔控制系统。
1 传统正线道岔控制系统
有轨电车的传统正线道岔控制系统在控制模式、定位方案、联锁控制器硬件设计结构及设置方案等方面还存在一定的不足。
传统正线道岔控制系统的道岔控制模式没有统一的规范和标准,给设计带来了诸多不便。
联锁控制器沿用了计算机+继电器的设计思路,没有实现无接点的全电子化,而且故障定位的难度和维修的工作量大。目前传统正线道岔控制系统采用的联锁控制器设置方式有集中控制和分散控制。集中控制方式存在运算量大,光电缆有效长度不足的缺陷。分散控制方式的设备分散,需要的联锁控制器数量多,增加了维修量和工程投入[4]。
单一的GPS(全球定位系统)、BDS(北斗卫星定位系统)、轨道电路定位、计轴定位等常用的定位方案不论在精度还是在安全性方面都不能满足道岔区段定位的需要。因此,本文主要针对以上存在的问题对现代有轨电车正线道岔控制系统做了相应的改进和完善。
2 改进正线道岔控制系统的关键技术
现代有轨电车正线道岔控制系统主要实现正线进路的控制,包括进路的排列和进路的解锁,以及道岔的单独锁闭和单独解锁等[3]。正线道岔控制系统的构成见图1。正线道岔控制系统的关键技术包括正线道岔控制模式的选择,轨旁联锁控制器的设计及其布置方式的分析选择,正线道岔区段电车的定位方案的确定。
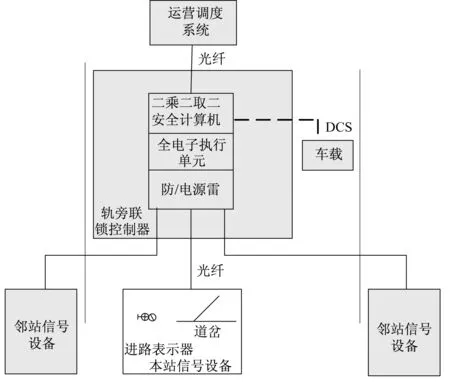
图1 正线道岔控制系统构成图
2.1 正线道岔控制模式
对于全封闭独立路权的城市轨道交通而言,其正线道岔控制系统可采用中央控制模式,由中心调度员统筹调度。这样既可提高效率,又能保证安全。此时,调度员只需根据工作站显示及联锁安全保证排列进路即可。
对于与道路交通混行的现代有轨电车而言,其道路不封闭,调度员不能掌握道路即时状况,尤其是道岔布置在开放路口的情况下,中心调度员即使要办理进路也需经过司机确认。因此,现代有轨电车的正线道岔控制系统应采用车载排路模式,以使得有轨电车运营更加灵活高效。当然调度中心也可通过无线方式与司机沟通,对列车运行进行统筹调度。
当车载设备正常,但调度中心系统发生故障时,应采用车载排路模式。车载设备根据GPS、BDS设备及电子标签,可确定电车是否接近道岔区段。车载显示终端会显示以电车所在位置为始端的所有可能进路。当司机选择并确认进路后,首先,车载控制器将进路号通过车地无线通信系统发送至轨旁联锁控制器,由轨旁联锁控制器进行联锁运算;然后,由无接点的全电子化执行单元动作道岔,锁闭进路,开放进路表示器;最后,司机按进路显示器的信号显示人工驾驶电车通过道岔区段。在车辆获得道岔控制权至完全离开道岔区段期间,为了保证行车安全,不允许控制系统赋予其它车辆对该道岔的控制权[3]。图2为车载排路模式简图。
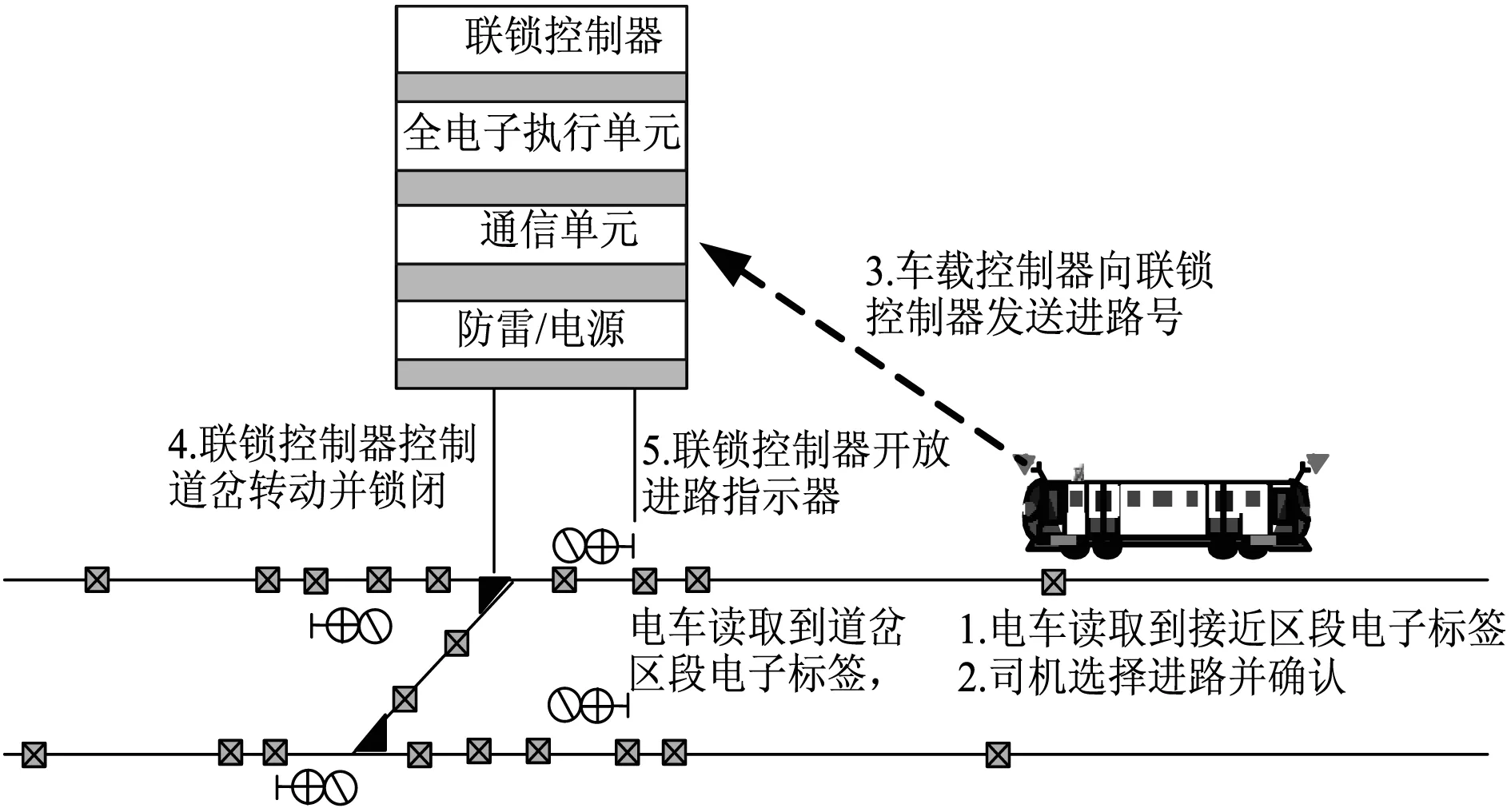
图2 车载排路模式
车载排路模式主要包括正常确认模式、人工辅助模式和隔离模式。
2.1.1 正常确认模式
正常情况下,车载排路模式的控制开关处于确认进路模式下。此时,由调度中心负责排列进路,锁闭道岔。车载显示终端显示道岔的实际位置和进路的选用状态,并显示将要通过的进路及其进路确认按钮,屏蔽其它进路及操作按钮。在司机确认进路后,轨旁全电子执行单元开放进路表示器;司机按信号显示人工驾驶电车通过道岔区段。
2.1.2 人工辅助模式
在人工辅助模式下,当列车接近道岔区域时,车载显示终端不仅自动显示前方道岔区域的站场图,还会自动显示以电车所在的位置为起点的所有可能的进路终端;然后,司机根据运营需要进行判断,选择并确认需要的进路终端;随后,车载控制器将相应的进路号发至轨旁联锁控制器,并由轨旁联锁控制器排列相应进路、搬动道岔及锁闭道岔区域,并自动开放进路表示器;最后,司机按信号显示人工驾驶电车通过道岔区段。
2.1.3 隔离模式
在车地通信中断情况下,司机可选择后备控制模式——隔离模式。当电车接近道岔区段时,车载显示终端不会提示进路状态或岔区站场图,而会显示隔离状态。这时,司机须下车至轨旁通过道岔控制盒手动控制道岔动作,或者至转辙机处人工搬动道岔,之后再驾驶电车,慢速通过。
2.2 轨旁联锁控制器
根据“故障安全”原则,一旦发生故障,信号设备或系统也能防止出现灾难性后果,自动导向安全一方。可见,信号设备或系统对有轨电车的运营安全至关重要。其中,轨旁连锁控制器的设计和设置是较为重要的。在每个区域集中站设置1套轨旁联锁控制器,以负责实现本站及管辖范围内车站的联锁逻辑运算,对其控制范围内正线上的所有道岔和进路指示器等设备进行控制。轨旁联锁控制器的核心处理单元硬件平台采用二乘二取二安全计算机。
2.2.1 二乘二取二安全计算机
二乘二取二安全计算机是轨旁联锁控制器的核心,负责整个有轨电车信号系统的联锁运算。二乘二取二安全计算机根据从全电子执行层采集的现场信号设备的实时状态和有轨电车发送的控制命令信息,进行联锁运算;同时,将运算结果发送到全电子执行单元、运营调度系统及车载设备[5]。图3为二乘二取二安全计算机的系统结构框图。

图3 二乘二取二安全计算机的系统结构框图
2.2.2 全电子执行单元
全电子执行单元是轨旁联锁控制器的执行表示电路,是由不同功能电子模块组成的全电子电路。电子模块按照道岔转辙机、信号表示器等不同类型的驱动与采集对象划分,且每个单元模块相对独立设计。电子模块本身具有执行控制命令、采集状态信息、检测信号设备动作和故障-安全等功能,可实现控制、监督和监测一体化,而且还具有带电热插拔功能。
全电子执行单元与二乘二取二安全计算机之间采用2路CAN(控制器局域网络)通信接口进行信息交换;而与运营调度中心的监测机间信息交换采用单独的CAN通信接口[6]。全电子执行单元经过防雷柜、分线盘和轨旁信号设备连接。图4为全电子执行单元硬件组成图。
全电子执行单元采用冗余技术来保证其可靠性和安全性。微控制器(MPU)及其驱动电路采用了静态的二取二冗余结构,可通过表决来隔离发生的故障。全电子执行单元采用两路单独的采集电路,将采集到的数据分别送给2个MPU(A和B)。这样从源头上对联锁数据进行了安全性防护。在MPU A和MPU B两者之间还设计了信息同步,实现了两路MPU输出数据的对齐。
整个全电子单元的涉安环节都采用了一定的容错和避错技术,以满足“故障安全”原则,进而保证了行车安全,提高了运营效率,改善了工作人员的劳动条件。
2.3 轨旁联锁控制器设置方案
轨旁联锁控制器的设置有集中联锁,区域联锁和分散联锁3种方案。
(1)集中联锁方案在全线只设1套联锁主机,并在每个或距离较近的相邻道岔区域均设置1套远程I/O(输入/输出)设备。联锁主机可放置在控制中心,也可放置在有条件的正线车站。
(2) 区域联锁方案在相邻几个道岔区集中设置一套联锁主机进行控制;每个道岔区相互独立,且道岔区之间无联锁关系。联锁控区的划分原则与地铁类似。
(3) 分散联锁方案以单独控制道岔为基础,将道岔控制器分散在轨旁道岔附近,1个道岔区域设置1套道岔控制器。有轨电车的进路无需经过中心或车站办理,而完全依靠有轨电车和轨旁道岔控制设备的交互来实现道岔控制,使道岔区段内的道岔和进路表示器之间建立起正确的联锁关系,以保证道岔控制的安全性和可靠性[7]。
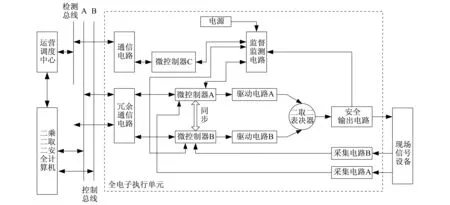
图4 全电子执行单元硬件组成图
集中联锁方案需在轨道沿线敷设大量的光电缆。当光电缆的长度超过一定的控制距离后,往往还需要设置远程控制单元和现场接口设备。这加大了前期建设中的设备投资额。此外,一旦通信出现故障,将会全面影响运营。而且,集中设置的主机如果发生故障,则影响面较大。因此集中联锁方案对于有轨电车信号系统而言并非首选。
虽然分散联锁方案的道岔控制安全性和可靠性较高,但是其设备分散,不便于安装和维护。区域联锁方案既克服了集中联锁方案的控制距离受限这一短板,也避免了分散联锁方案的设备分散、安装维护不便的缺点。因此,综合考虑了安全性,市政景观和资源投入等因素,区域联锁方案为有轨电车轨旁联锁控制器设置首选方案。
2.4 电车定位
目前世界上主要的卫星定位系统有美国的GPS、我国的BDS、俄罗斯的GLONASS(格洛纳斯定位系统)及欧洲的Galileo(伽利略定位系统)。目前,在这几种定位系统中,GPS定位精度最高(普通民用GPS定位精度达到10 m),稳定性最好。但不论是BDS还是GPS,单一的卫星定位方案在现代有轨电车正线道岔控制系统中仍是远远不够的。因此,必须考虑其他辅助的定位工具,以使有轨电车在道岔区段的定位更加精确。
其它辅助的列车定位手段有轨道电路定位、计轴器定位、感应式通信环线定位及RFID(射频识别)电子标签等。使用传统的轨道电路进行列车定位时,只能确定列车所在的道岔区段,无法进行精确位置的判断。轨道电路定位的电缆布置及设备会使得整个系统复杂化。采用计轴器定位时,由于现代有轨电车轨面与城市道路布置在同一个水平面上,因此存在锯轨现象。随着无线通信技术和电子技术的不断完善和发展,同时为了提高列车定位的精确度,实现“故障安全”原则,基于GPS/BDS+RFID电子标签的有轨电车组合定位手段应运而生[8]。
有轨电车首先通过车载的GPS/BDS终端获取有轨电车的位置信息;然后,通过地面设置的RFID电子标签对GPS/BDS获取的位置信息进行校正;随后,将最终的位置信息通过无线通信方式发送至控制中心(OCC);最后,通过RFID电子标签检测出有轨电车在道岔区段的占用和出清。
RFID读写器及通信设备安装在车载安全计算机上,无源电子标签按一定间隔安装在道岔区段,并在道岔区段前方一定距离处专设1个电子标签用以判断列车是否已接近道岔区段。每当有轨电车通过1个电子标签时,安装在有轨电车底部的读写器就会读取标签内的精确位置信息数据,从而实现精确的定位。有轨电车在运行时会连续、依次读取多个标签内的位置信息,而车载安全计算机就会根据电车的位置信息的变化及电车实际长度,判断出有轨电车的运行方向及运行距离,进而确定有轨电车在道岔区段的占用和出清情况。
3 结语
以当前现代有轨电车信号控制技术为基础,结合轨道交通“故障安全”原则要求,从有轨电车进路控制模式,轨旁联锁控制器的结构设计,轨旁联锁控制器的设置方式和电车在道岔区段定位手段入手,对有轨电车信号控制系统进行了分析设计。改进后的正线道岔控制系统在理论设计中较传统的道岔控制系统更简单,安全性更高,工程投入量更少。
[1] 周翊民.现代有轨电车的快速发展是社会发展的必然需要[J].城市轨道交通研究,2013(8):1-4.
[2] 吴耀东,李国龙.现代有轨电车的信号系统[J].交通与运输,2014,30(4):10-11.
[3] 公吉鹏.新型有轨电车道岔控制方案分析[J].城市轨道交通研究,2014(7):119-121.
[4] 李晶.现代有轨电车正线道岔控制方案的选择[J].铁道通信信号,2015,51(1):69-72.
[5] 陈光武,范多旺,魏宗寿,方亚非.基于二乘二取二的全电子计算机联锁系统[J].中国铁道科学,2010,31(4):138-144.
[6] 苏思琦.全电子计算机联锁系统信号模块安全性分析[D].兰州:兰州交通大学,2013.
[7] 薛洪峰.现代有轨电车信号控制关键技术研究[D].北京:北京交通大学,2013.
[8] 李强.现代有轨电车正线道岔控制系统方案研究[J].电气自动化,2015,37(2):100-102.
Research on Main Switch Control System of Modern Tram
ZHAO Xiaochun, CHEN Guangwu
In the study of modern tram switch control system on the main track, there are four key aspects: the selection of switch control mode, exploitation and design of track-side interlocking controller, setting scheme of the track-side interlocking controller, the comparison and selection of trolley positioning in switch-area.Car-driver control mode improves the efficiency, at the same time reduces the labor intensity of the driver. The way-side interlocking controller adopts all-electronic execution units instead of the contact relays, the design of regionalization interlocking controller combines the advantages of centralized control with decentralized control, which is simple and requires only small investment, while the GPS/BDS+RFID electronic tag positioning overcomes the defect of other single positioning methods.The whole design scheme makes the system simple, safe and reliable with small investment, therefore is suitable for the development of modern tram.
modern tram; switch control; interlocking controller
Institute of Automatic Control,Lanzhou Jiaotong University,730070,Lanzhou,China
*甘肃省基础研究创新群体计划项目(1606RJIA327); 甘肃省科技支撑计划项目(1604GKCA009)
U 213.6:U 482.1
10.16037/j.1007-869x.2017.03.022
2015-12-15)
