基于模糊自适应PID控制的ATO系统控制算法*
2017-03-27钱存元施招东
刘 浩 钱存元 施招东
(同济大学铁道与城市轨道交通研究院,201804,上海∥第一作者,硕士研究生)
基于模糊自适应PID控制的ATO系统控制算法*
刘 浩 钱存元 施招东
(同济大学铁道与城市轨道交通研究院,201804,上海∥第一作者,硕士研究生)
为了研究ATO系统控制算法的智能性和高效性,在传统PID算法的基础上,充分考虑到列车系统的非线性和复杂性,结合模糊控制理论能进行实时非线性调节的优点,提出了模糊自适应PID控制算法。并在Matlab/Simulink中建立了ATO系统的仿真模型和算法控制模块。将两种算法分别运用到ATO系统中,对目标速度曲线进行跟踪,从停车精度、追溯性、准时性、节能性、舒适性五个方面对二者的控制性能进行比较分析。仿真结果表明,将模糊自适应PID算法运用到ATO系统中,列车的控制性能能够很好地满足ATO系统的各个性能指标要求。
列车自动驾驶系统; PID控制算法; 模糊自适应PID; 目标速度曲线
作为ATC(列车自动控制)系统的关键子系统之一,ATO(列车自动驾驶)系统是城市轨道交通列车实现自动驾驶、降低能耗、提高效率和运营安全的基础[1-3]。随着ATO系统的不断发展,国内外对ATO控制算法的研究取得了较为显著的成果。
目前主流的ATO系统控制算法主要包括传统PID(比例-积分-微分)控制算法、模糊控制算法、遗传算法及神经网络控制算法等。然而这些算法都存在着一定的局限性。采用传统PID算法,则工况切换时列车速度的变化次数过多,舒适性差,能耗较大;模糊控制虽然舒适性好,但速度控制精度低;遗传算法和神经网络控制算法由于其快速性、追溯性较差,故更适于系统优化[4]。
本文结合传统PID算法与模糊控制的优点,提出了模糊自适应PID算法,试图解决ATO系统速度跟踪过程中的追溯性、舒适性及节能性等问题,为开发智能高效的ATO系统提供技术参考。
1 ATO系统的架构及性能指标
1.1 ATO系统构成及原理
ATC系统包含ATO系统、ATP(列车自动防护)系统和ATS(列车自动监控)系统等3个子系统。ATO系统是代替司机实现列车自动驾驶的系统;可在ATP系统的保护下,根据ATS系统的指令实现列车的自动驾驶;能够自动完成对列车的起动、牵引、巡航、惰行和制动的控制,确保达到设计的间隔和行驶速度,从而实现列车的自动驾驶;具有提高乘客舒适度及列车的准点率,运营安全等优点。ATP系统在ATC系统中主要负责监测列车安全运行,其主要功能包括列车运行超速防护、列车车门及屏蔽门的安全监督等。ATS系统主要负责编制列车运行图,并根据运行图自动办理列车进路,自动调整列车运行间隔;依靠现场的行车信息,实现组织和控制行车的指挥。ATC设备主要包括车载控制器(车载ATP设备和车载ATO设备)和地面设置的区域控制器、数据存储单元及ATS设备。ATC系统的原理图如图1所示。
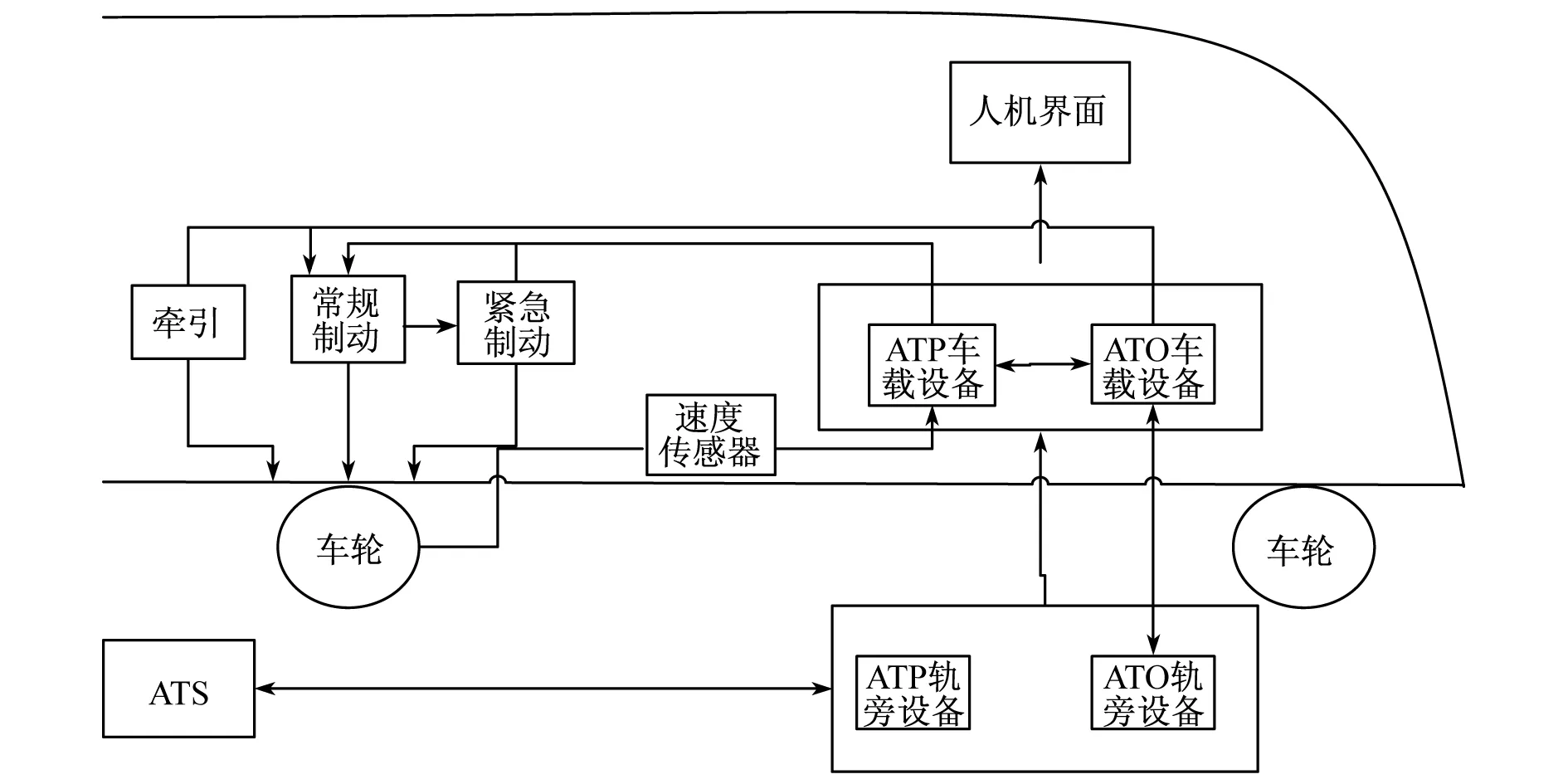
图1 ATC系统原理示意图
1.2 ATO系统的性能指标
ATO系统最主要的功能就是通过智能算法替代司机实现对列车速度的自动调整及站内定点停车,使列车能高效安全地运行。因此,对其控制算法的优劣进行评价至关重要。ATO系统控制算法评价一般参照以下几项性能指标[7]:
(1) 追溯性。追溯性是指列车实际运行速度与目标速度的贴近程度。满足追溯性要求时,控制算法既能保障列车的运行安全,又能提高列车的通过能力和运行效率。
(2) 准时性。在城市轨道交通系统中,列车的准时性对于保障线路的通畅运行来说是至关重要的。线路不同区段上的每列列车都有其运行时间,若前方列车误点运行,将会直接导致后续列车的延误,并最终打乱整个系统的运行作业。
(3) 停车精度。当车站配有屏蔽门时,停车的精度会直接影响车门和车站屏蔽门的相对位置。停车精度差时,会影响屏蔽门的正常开启,导致乘客无法正常上下车。
(4) 舒适性。舒适性受线路情况、司机的操纵水平、车辆的构造及列车的运行模式等因素影响。为了提高列车乘坐舒适性,应尽量减少列车工况及档位的切换次数,做到工况间及档位间的平滑切换。
(5) 节能性。列车的能耗主要与牵引、制动、惰行策略相关。采用不同的ATO控制算法时,其相应的列车能耗大小也是不同。运行中,应当尽量减少不必要的过度牵引,并且在满足运行时分的前提下尽可能提高惰行时间比例,以减少列车行驶过程中的制动时间。
2 ATO系统的控制算法
2.1 传统PID控制算法
国外对PTD控制算法的研究起步较早。传统PID控制器就是按照偏差的比例、积分、微分进行控制。具有算法简单、稳定性好、可靠性高的特点。由于PID控制器设计简单、适应面宽,现已成为过程控制中应用最广泛的一类基本控制器,且对于各种线性定常系统的控制,尤其是被控参数固定的系统,都能获得令人满意的控制效果。传统PID控制器的原理框图如图2所示。具体PID控制器表达式为:
(1)
式中:
c(t)——输出量;
r(t)——输入量;
Kp——比例增益;
Ki——积分增益;
Kd——微分增益。
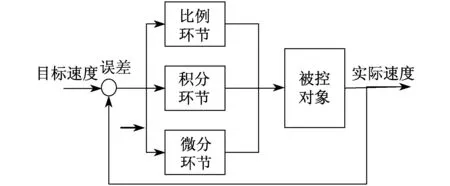
图2 PID控制的原理框图
2.2 模糊自适应PID控制算法
2.2.1 模糊控制原理
模糊控制器工作时,首先,将输入的数字信号经过模糊化(D/F)变成模糊量,并送入含有模糊规则的模糊推理模块(A*R),近似推理得出结论——模糊集合;然后,被清晰化模块(F/D)变换成清晰量,再输入到下一级去调节被控对象,使其输出满意的结果[7]。本文所采用的模糊控制器为Mamdani二维模糊控制器[8],其原理图如图3所示。图3中,D/F可实现清晰量到模糊量的转换运算;A*R可根据输入模糊量进行近似推理运算,得出模糊量;F/D可实现模糊量到清晰量的运算。
图3中,Ke、Kec及Ku的作用是对清晰值或模糊值进行比列变换。

注:Ke、Kec为量化因子,Ku为比列因子图3 Mamdani二维模糊控制器原理框图
2.2.2 模糊自适应PID控制算法的设计
对变量复杂,没有确定的数学模型和规律可循的系统,传统PID很难获得满意的控制效果。模糊控制能充分利用操作人员的实时非线性调节实践操作经验,对PID的参数进行实时调整,建立模糊自适应PID控制器。模糊自适应PID控制算法的原理是把输入到PID调节器的偏差e和偏差变化率ec同时输入到基于Mamdani二维模糊控制器;然后,对输入量分别进行模糊化、近似推理和清晰化处理;最后,把计算出的修正量ΔKp、ΔKi、ΔKd输入PID调节器中,并对PID的3个系数进行实时在线修正,从而更好地对被控对象进行控制。原理框图如图4所示。
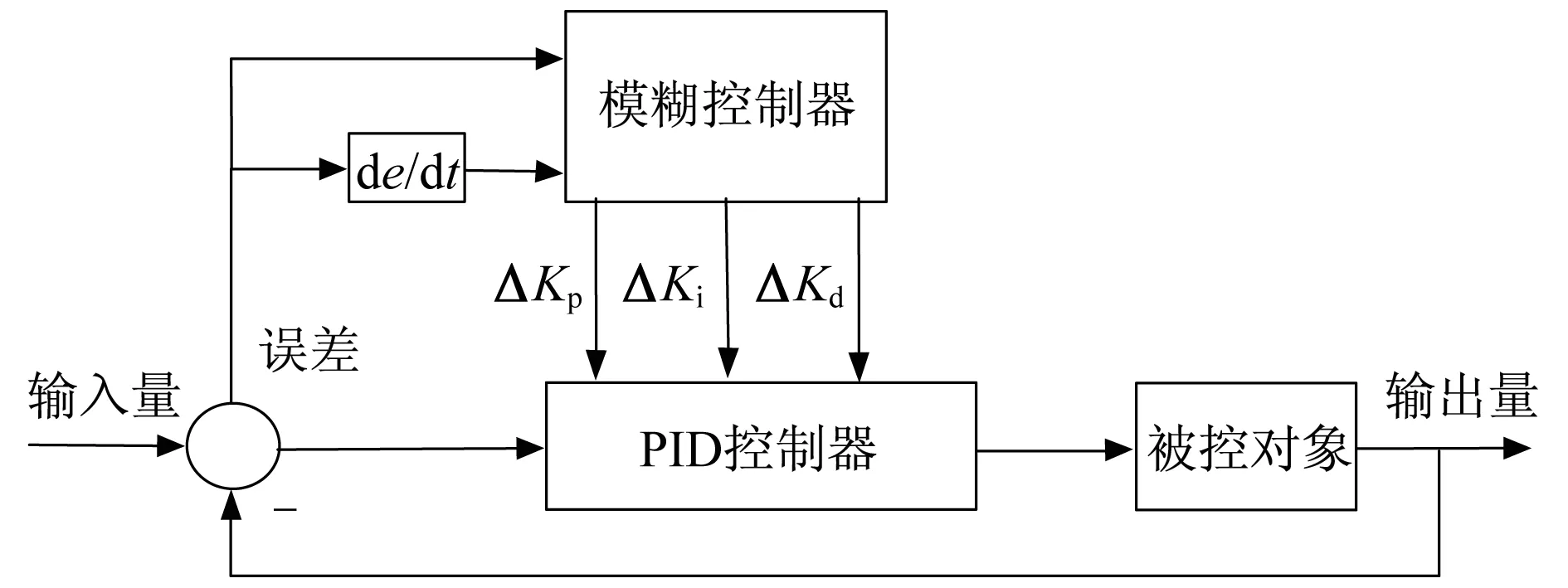
图4 模糊自适应PID控制原理框图

最后,模糊控制器修正的PID参数的实时取值分别为Kp+ΔKp、Ki+ΔKi、Kd+ΔKd。其中,Kp、Ki、Kd为PID控制器整定的初始值。结合上述规则和大量试验数据分析,得出了ΔKp、ΔKi及ΔKd的模糊自适应规则,见表1~表3。

表1 ΔKp的模糊自适应规则
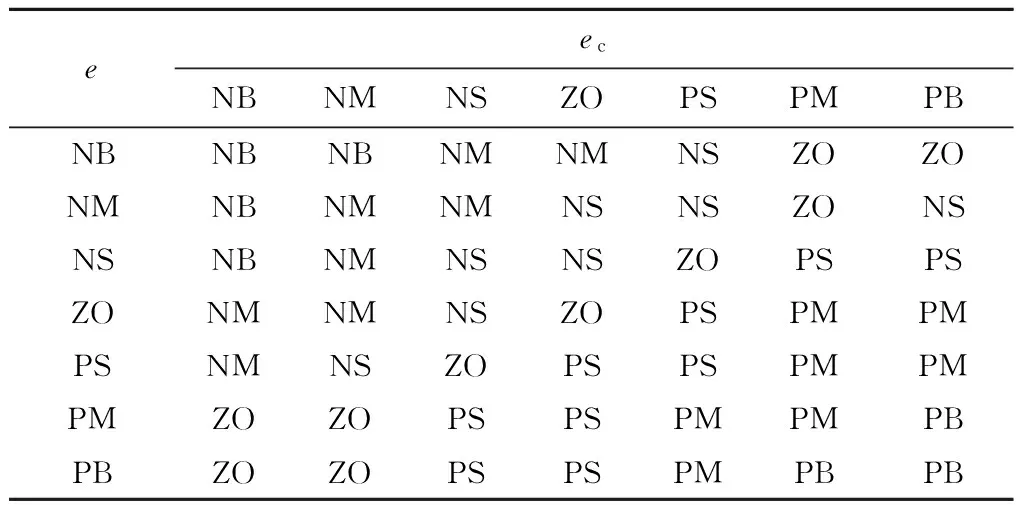
表2 ΔKi的模糊自适应规则

表3 ΔKd的模糊自适应规则
3 ATO系统的建模与仿真
3.1 仿真建模及仿真参数
在基于Matlab/Simulink的环境下搭建ATO系统的仿真模型,并建立传统PID和模糊自适应PID算法的控制模块,如图5所示。
模糊自适应PID算法的建模思想是通过反馈列车的实际速度,并与目标速度比较,从而得到速度误差e;将e微分得到误差变化率ec(即加速度),把e和ec作为模糊控制器FC(Fuzzy Control)的输入,通过知识库里的模糊控制规则来实时修正PID控制器的参数Kp、Ki及Kd,从而实现对列车速度的实时控制。
在模糊化模块中,将模糊输入语言e、ec以及输出控制量u均划分为7个模糊子集(负大,负中,负小,零,正小,正中,正大)。由于目前还没有成熟的方法来确定隶属函数,主要还是停留在利用经验的基础上。因此,本文选取应用最广的三角形隶属函数作为e、ec、u的隶属函数。
在清晰化模块中,常用的清晰化方法有最大隶属度法、面积重心法和加权平均法等[10]。综合考虑实际试验效果等多方面因素,本文最终采取面积重心法。
两种列车运行的控制算法所采用的仿真参数中,PID参数的初始值Kp=20,Ki=3.24,Kd=99.9;速度误差e的模糊论域为[-3,3],物理论域为[-10,10];加速度误差ec的模糊论域为[-6,6],物理论域为[-2,2];输出控制量u的模糊论域为[-10,10],物理论域[-15,15];量化因子Ke=0.6,Kec=1.5,比例因子Ku=10。
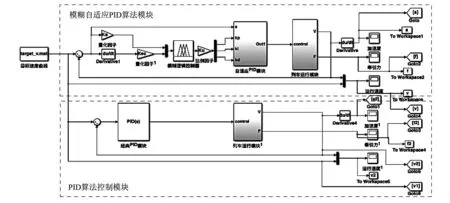
图5 两种算法的控制模型
3.2 仿真条件
正常工况下的无限速运行环境,对于目标曲线的生成及跟踪能力的要求较低,难以真实反映ATO系统性能的优劣。故本文采用限速工况下的列车运行环境作为仿真条件,以增加运行控制的难度,从而达到检测控制算法优劣的目的。具体的线路运行要求如下:
(1) 列车在运行距离为2 187 m、运行时间为166.6 s的条件下限速运行。
(2) 将限速等级划分为三个层次:在0~900 m区段,列车的限制速度为80 km/h;在900~1 200 m区段,列车限制速度为60 km/h;从1 200 m起,列车的限制速度为70 km/h。
(3) 列车从1 800 m处开始施加制动力,直至列车平稳停靠。根据上述要求仿真生成的目标速度曲线和ATP速度曲线如图6所示。
3.3 仿真结果分析
采用传统PID算法、模糊自适应PID 算法对列车目标速度曲线进行跟踪控制,并结合ATO系统的5个性能指标进行比较分析,拟评价出相对智能高效的控制算法。仿真结果如图7~12所示。
根据上述仿真结果,分别从不同性能指标对两种算法的控制性能进行比较分析。
(1) 追溯性。从图7、图9和图10可以看出,在PID控制下,ATO系统跟踪目标速度曲线的能力较弱;在70~105 s的减速、惰行和加速阶段,列车的实际速度曲线与目标速度曲线之间波动较大,超调严重,威胁到列车驾驶的安全性,追溯性较差。在模糊自适应PID控制下,ATO系统的速度跟踪能力较PID控制有了明显改善;在加速、惰行和减速阶段速度曲线更加平滑,不再出现大幅振荡;整个运行阶段实际速度曲线与目标速度曲线贴合度较高,ATO系统的安全性和追溯性有了极大提高。
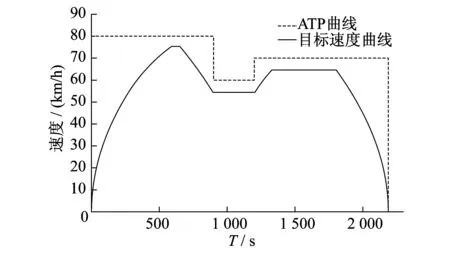
图6 列车运行的ATP速度曲线和目标速度曲线
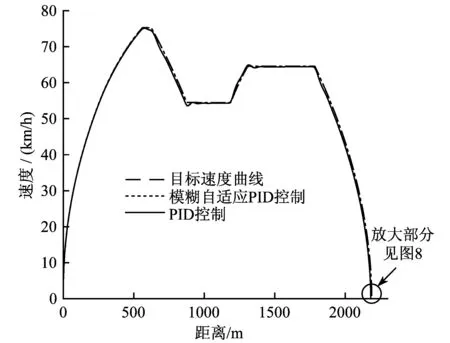
图7 列车运行的速度-距离曲线
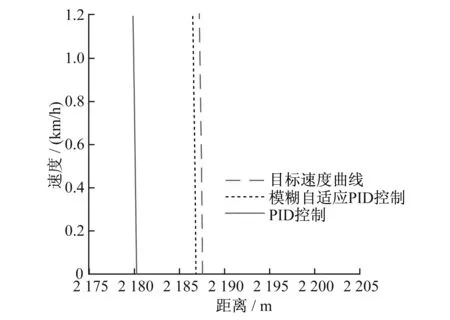
图8 速度-距离曲线局部放大图
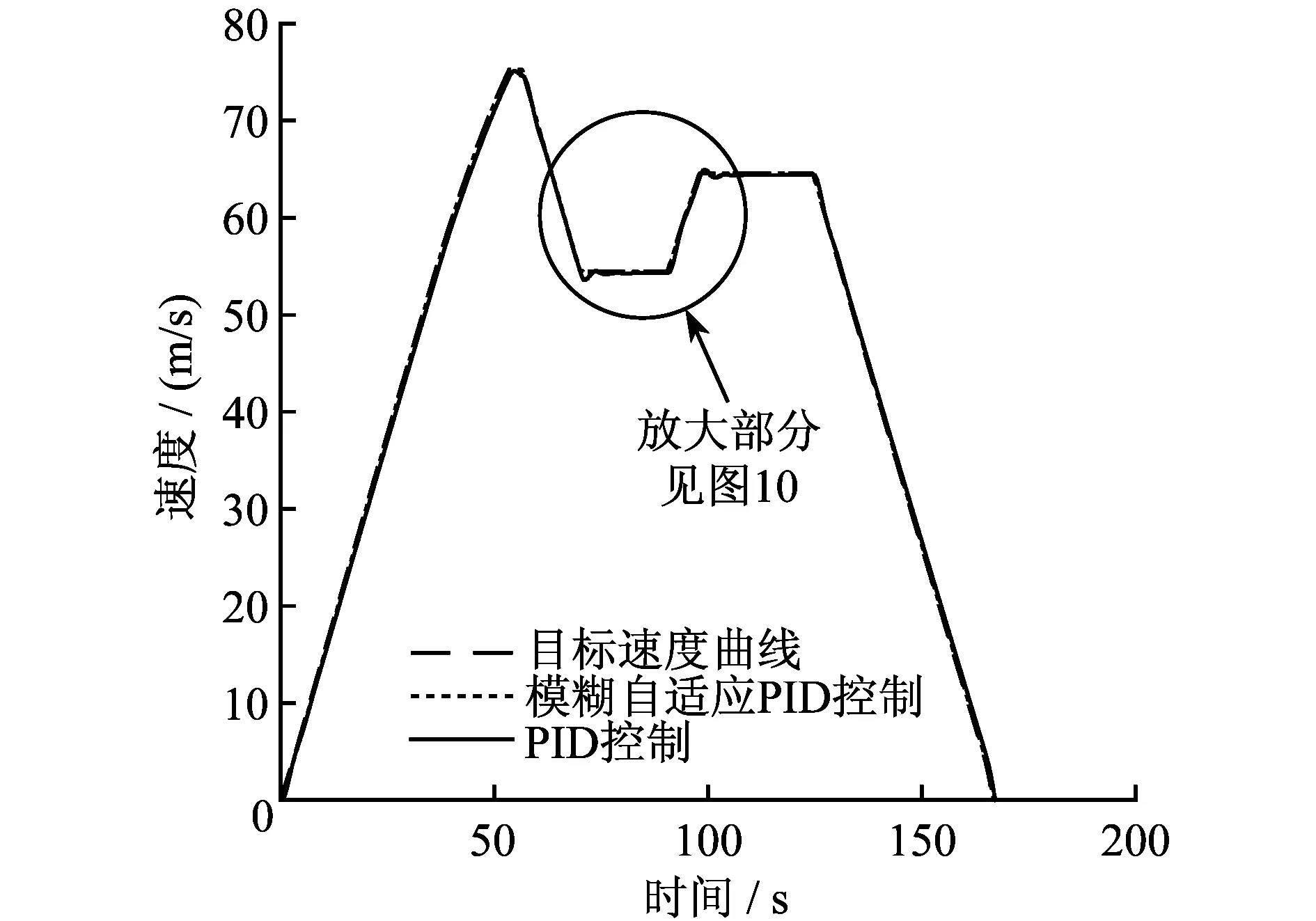
图9 列车运行的速度-时间曲线图

图10 速度-时间曲线局部放大图

图11 加速度变化曲线
(2) 准时性。由图9可知,PID控制下的列车实际运行时间为167.2 s,误差为0.6 s;模糊自适应PID控制下列车的实际运行时间为166.8 s,误差为0.2 s。可见后者的准时性较好。
(3) 停车精度。由图8可知,PID控制算法下列车实际运行距离为2 180.22 m,误差达到6.78 m,完全超过列车±0.3 m停车精度要求。在模糊自适应PID控制算法下,列车实际运行距离为2 186.55 m,误差为0.45 m。虽然精度还有待提高,但相比PID控制的停车精度已经有了很大改善。
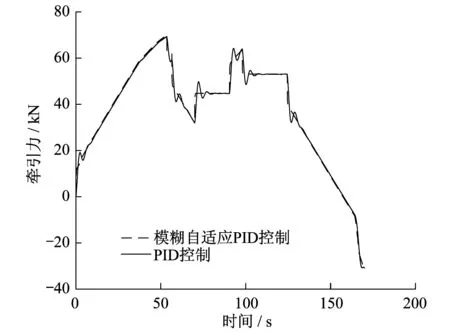
图12 牵引力变化曲线
(4) 舒适性和节能性。根据图11、12可知,与传统PID算法相比,模糊自适应PID算法能很好地对列车牵引力和加速度进行控制。在工况切换时,前者的牵引力和加速度曲线波动明显,超调严重,乘客舒适性和列车节能性较差;后者的牵引力和加速度曲线在工况发生改变时依然十分平滑,曲线几乎没有振荡,列车的牵引系统和制动系统不需要频繁切换,舒适性和节能性有了明显改善。
综上所述,模糊自适应PID控制比传统PID控制的动态响应更快,超调更小,其鲁棒性更好,稳态精度更高,满足ATO系统停车精度、追溯性、准时性、节能性及舒适性等性能指标的要求。
4 结语
智能高效的ATO控制算法是实现列车自动驾驶的关键所在。本文在传统PID算法的基础上,结合模糊控制和PID控制的优点,提出模糊自适应PID控制算法,将其运用在列车ATO系统中,并对目标速度曲线进行跟踪控制,对其控制性能与传统PID算法从停车精度、追溯性、准时性、节能性、舒适性等方面进行评价。仿真结果表明,对于一个复杂非线性的列车控制对象,模糊自适应PID控制算法具有良好的控制效果,基本弥补了PID控制器的不足,稳态精度高,鲁棒性好,满足ATO系统的各个性能指标要求。然而,由于模糊控制模块的参数是通过大量试验结合模糊控制规则在合理范围内所取的最优参数,没有经过精确的数学计算验证,因此,后续还需要更深一步研究,以获得更理想的效果。
[1] 徐涛.遗传算法在优化告诉列车自动驾驶中的应用[J].城市轨道交通研究,2014(3):59-60.
[2] 支柱,刘红璐.城市轨道交通ATO系统自动速度控制功能的仿真实现[D].北京:北京交通大学,2007:514-515.
[3] 康太平.基于模糊预测控制的列车自动驾驶系统研究[D].成都:西南交通大学,2003:9-14.
[4] 贾利民.列车运行过程的智能控制[J].中国铁道科学,1992,13(1):65-78.
[5] 姚理.基于智能控制算法的列车自动驾驶系统的优化研究[D].北京:北京交通大学,2009:36-38.
[6] 王义惠,宁滨,宋永端.高速列车制动及牵引自动控制研究[J].控制工程,2010(S1):5-8.
[7] 饶晓璐.列车自动驾驶算法研究及仿真实现[D].成都:西南交通大学,2010.
[8] 李国勇,杨丽娟.神经·模糊·预测控制及其MATLAB实现[M].北京:电子工业出版社,2013:187-215.
[9] 曾光奇,胡均安,王东,等.模糊控制理论与工程应用[M].武汉:华中科技大学出版社,2006:92-93.
[10] 诸静.模糊控制理论与系统原理[M].北京:机械工业出版社,2005:192-195.
ATO System Control Algorithm Based on Fuzzy Adaptive PID
LIU Hao, QIAN Cunyuan, SHI Zhaodong
In order to research on the intelligence and efficiency of urban rail transit ATO system, by taking the non-linear and complex of train system into consideration on the basis of traditional PID control algorithm, and combined with the advantages of fuzzy control theory that can be adjusted in the real-time non-linear system, the fuzzy adaptive PID control algorithm is proposed, simulation models of ATO system and algorithm control module are established in Simulink. The two algorithms are applied to the ATO system to track the target speed curve, analyze the control performances of the two algorithms from five aspects of precision of parking, traceability, punctuality, energy-saving,degree of comfort. imulation results show that ATO system can perfectly satisfy the five performance requirements under the control of fuzzy adaptive PID algorithm.
ATO (automatic train operation); PID(proportion integration differentiation) control algorithm; fuzzy adaptive PID; targets peed curve
Institute of Railway and Urban Rail Transit, Tongji University,201804,Shanghai,China
*国家科技支撑计划项目(2015BAG19B02)
U 231.6
10.16037/j.1007-869x.2017.03.009
2015-11-29)
