气伺服焊钳设计
2017-03-24许剑枫


摘 要:汽车车身零件几乎都是采用电阻点焊连接装配,近年来已经成为最普遍的加工方式。为了保证车身的质量问题,在此提出一种基于气动伺服控制系统的气伺服焊钳。它主要由:伺服控制器、执行机构(气缸、气动伺服阀和负荷等)、位置传感器、压力传感器等组成。它具有体积小、快响应、大输出的特点,能够改善对焊枪的高精度定位和柔性的焊接控制,并且价格实惠。
关键词:气伺服;气缸;气动伺服阀;焊钳
福建省中青年教师教育科研项目(编号:JB14117)和石狮市科技计划项目(编号: 14KYS053)研究成果
汽车车身工程是目前世界汽车工业中研究最活跃、发展最迅速的一个领域,而在车身制造中大量采用点焊工艺。作为点焊机.器人其主要功能是,按预先编制好的焊接程序操纵焊钳自动完成工件的点焊工作。焊钳作为机器人操纵的工具,对机器人的使用有很大的约束力,若结构设计不合理,将直接影响机器人的效率和接近性,同时对机器人运行中的安全有很大的威胁。点焊焊钳的设计必须从机器人操作特点出发,功能上要具备适于机器人使用的特殊功能,结构上要满足机器人的要求。目前常用点焊焊钳为电动伺服式焊钳,虽动作精度较高,但是同时也存在着传感难、成本高等一系列难题。故在此以气伺服系统代替电动伺服系统,以更稳定的焊接质量,更简单的传动方式,更方便的感应反馈,更低廉的制造成本去实现白车身的点焊工艺
1 焊钳(电极)结构
针对焊接工艺和伺服控制系统的特点,再结合实际焊接生产中常用焊钳的结构,我们设想两种焊钳结构如图1-1。
方案A:采用C型结构,其中一端固定,而另一端与伺服气缸连接带动电极前后移动。该方案仅需要一个伺服气缸即单极运动,结构简单有较好的稳定性,但焊接范围较为局限,难以进行跨越式焊接,对被焊接件的位置要求较高。
方案B:采用X型结构,两端均为可以移动端,一端连接主气缸,而另一端连接平衡气缸。双极同时运动,焊接范围较广,可进行跨越式焊接,允许在一定的倾斜条件下焊接,对被焊接件的位置要求较低。
2 气伺服系统
气动伺服系统控制精度高的核心是对控制物理量的测量和控制。气动系统的重要部件——气动伺服阀的存在,使得气体的输入压力能够得到控制。控制阀的静态特性可用稳态时气体流经控制口的流量与压力以及阀的输入位移之间的关系即压力一流量特性来描述。通过对控制阀的压力、流量特性的测量以及相应输出控制即可实现对气动系统相应特性的控制。
2.1 伺服氣缸
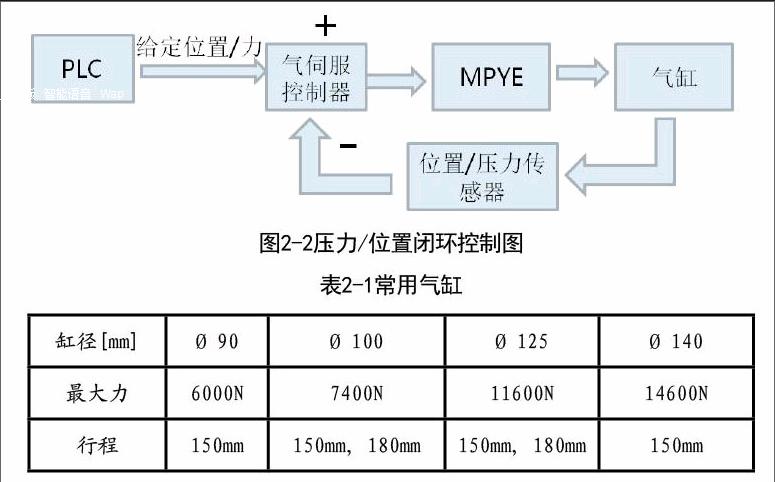
实际为伺服气缸其上面设有压力及位置传感器,并依靠不同的传感器形成两套闭环控制如图2-2。常用气缸参数如表2-1。
2.2 比例伺服阀
MPYE比例伺服阀根据输入信号成比例输出流量,但实际上比例于输入信号的是阀开口的有效截面积的大小,为使有效截面积成比例变化,大多数比例阀使用滑阀的主阀结构,用来控制主气缸位置/输出力的控制。内部采用硬密封,能快速响应电信号。
MPYD位于控制阀块上,通过控制器对其切换,可以控制平衡缸的前后腔压力差,来平衡整个焊枪的重量
2.3 伺服控制器
伺服控制器分别由压力控制模块和位置控制模块两部分组成。详细功能如图2-3所示。
3 气伺服控制气路
3.1 气路主要元件功能
1)主气缸:给焊枪电极提供一定的焊接压力,在机器人运动过程中,快速定位到某一焊接位置,缩短焊接节拍。
2)平衡缸:平衡焊枪自重,自动补偿电极与焊件之间的偏差,柔性接触。
3)快排阀:两个快排阀位于主缸辅助回路气块。 当气源接入控制阀块后,快排阀立即切换(气控),且在整个工作过程中保持。当外部气源突然断掉或者客户切断气源后,快排阀自动复位,并将主气缸中的压力空气迅速排空,起到安全保护的作用。
4)锁定功能阀:两个锁定功能阀位于主缸辅助回路气块。在使能阀不动作的情况下,它由主气源的压力自动切换(气控)。并将MPYE至主气缸的气路隔断,防止因为MPYE的泄漏而造成主气缸的误动作。
5)气源关断阀V0:位于控制阀块上。通过切换,可以控制给MPYE,MPYD的供气,在焊枪空闲状态下,可以节省因为硬密封造成的泄漏,以及防止气缸由于泄漏造成的误动作。
6)使能阀V1:位于控制阀块上。通过切换,可以让MPYE供给主气缸的气路导通。焊枪电极可以工作。
3.2 气路工作过程
Step1:气源接入,V0和V1不动作,快排阀和锁定功能阀切换(气控)。主气缸被锁住。
Step2:V0动作,空气供给MPYE和MPYD,此时可控制平衡缸将焊枪锁定。焊枪移动至焊接工位。
Step3:V1动作,锁定功能阀复位。MPYE可以控制主气缸以一定的速度,压力将焊接件夹紧。MPYD可以控制平衡气缸进行一定的位置补偿,使焊钳平稳地接触工件。
Step4:焊接结束,电极复位V1复位,锁定功能阀切换(气控),主气缸被锁定,MPY将焊枪锁定。焊枪运动至下个焊接工位。
4 应用分析
4.1 应用特点
首先,考虑到气体的泄露以及空气体积的变动,实际工作过程气缸的移动与电极的存在着较大差异。但通过大量试验发现两者虽然不成正比,但是依然存在着一定的数学关系,所以我们可以通过多点校核建立对应的数学模型从而建立实际电极与气缸位置的数学关系,最终也可以达到我们给定的电极位置确保焊接正常进行。因此,气伺服控制在电极移动精度上相比电动伺服控制也同样可以达到焊接精度要求。图4-1为电极与气缸的多点校核。
其次,不管是气伺服控制还是电动伺服控制电极在使用过程中必然存在着损耗那么实际电极位置是渐变的,这样就导致气缸达到预定的位置随着电极的损耗而受到影响。因此,我们也需要研究电极的损耗模型,以提高定位精度。通过试验我们得到在受电极损耗时气缸的位置如图4-2。最终我们可以对此进行补偿以进一步提高焊钳的定位精度。
最后,焊钳作为机器人的第7轴来定位运动,当机器人运动的时候就能够完成焊枪的打开与闭合,节约整个节拍50 %的时间,运用第7轴相比传统的顺序控制焊枪方式,可以增加15-20 % 的生产速率,枪的运动类似于其他轴,是由机器人软件控制的。 机器人能在一个插补周期中(12ms)将位置设定值送到焊枪控制器中。气伺服焊枪能像电伺服焊枪一样运行,轮廓追踪错误能降到最小。在第7轴模式下实现高的动态性能。对于操作者,能够简单地进行避障定位,碰撞现象减少如图4-3。
4.2 应用范围
本产品主要针对于汽车焊接过程的运动控制部分,不涉及具体焊点质量,属于次级终端产品。是一款主要以提高汽车零部件焊接中的位置精度、压力精度、工作效率、安全性以及经济性为目的伺服机构。后期配合机器人补偿,进一步提高产品的定位精度和定位效率,以期取代目前市场主流的的电动伺服控制系统为主导的汽车焊接工艺。
5 结论
气伺服焊钳是基于气伺服系统控制的可针对汽车零件焊接工艺进行自动化加工设备,是一款可以取代电动伺服焊钳的结构简单、成本低廉、生产效率较高且可控的焊枪。
参考文献
[1]王波.电阻点焊气动伺服系统力/位置复合控制关键技术研究[D] 北京理工大学2015
[2]谢朝夕.气动伺服定位系统的理论研究与应用[D] 重庆大学 2005
作者简介
许剑枫(1987-),男,福建漳州人,学士,闽南理工学院,讲师,主要从事机电技术研究。