基于模糊控制的灌溉施肥系统设计与应用
2017-01-18孔德志孙昌权
孔德志, 孙昌权
(江苏农林职业技术学院,江苏句容 212400)
基于模糊控制的灌溉施肥系统设计与应用
孔德志, 孙昌权
(江苏农林职业技术学院,江苏句容 212400)
设计了一种基于模糊控制的灌溉施肥系统。运用物联网技术构建无线传感器网络,采集作物生长区的温度、湿度和光照强度数据,通过在线可溶性盐浓度(EC)/pH传感器实时监测灌溉施肥系统的主要参数,经模糊决策后,上位机发送控制指令给下位机,由下位机控制灌溉施肥系统工作,实现不同营养液浓度、不同灌溉模式的灌溉施肥所需营养液的精准调配。
模糊控制;灌溉施肥;可编程逻辑控制器
我国每年的用水总量约4 000 km3,其中农业用水占总用水量的70%[1]。由于灌溉技术落后、灌溉设施不配套、管理不到位等原因导致我国用水浪费严重,水资源利用率低下,农业灌溉水的利用系数平均约为0.45,而发达国家达到0.70~0.80[2-3]。我国传统化肥当季利用率较低,氮肥为30%~35%,磷肥为10%~20%,钾肥为30%~50%。逐年递增的化肥用量以及较低的利用率导致化肥面源污染日益严重,经济损失增加。同时由于化肥的大量和不合理施用,导致土壤肥力退化,土肥养分流失对地表水和地下水造成严重污染[4]。因此,迫切需要解决灌溉施肥中存在的上述问题。
水肥一体化技术是将灌溉和施肥有机结合的一项现代农业技术,通过水、肥的精准供给实现节约资源、减少环境污染的目的。笔者介绍了一种具有多路母液的灌溉施肥系统,通过在线传感检测系统、模糊控制器和自动控制系统实现精准配肥与灌溉,以提高水肥利用率,减少水资源浪费。
1 系统组成与工作原理
灌溉施肥系统主要由施肥机本体、控制装置、传感检测网络和模糊控制器4部分组成,系统本体结构如图1所示,实物如图2所示。传感检测网络将温度、湿度和光照强度、可溶性盐浓度(EC)值、pH和流量等参数传送给控制装置,控制装置中的模糊控制器依据系统设定进行决策,结果由上位机转换成相应的控制指令传送给下位机,下位机依据控制指令对系统中的水泵、文丘里吸肥器和电磁阀等执行部件进行控制,实现水肥供给的精确控制。
2 模糊控制器设计
灌溉施肥系统是一个多变量、大惯性、非线性和强耦合的控制对象[5-6],无法获得精确的数学模型,因此采用模糊控制。控制参数主要有3个,分别为EC值、pH和流量,而EC值的控制重要性和控制复杂程度远高于其他被控参数,所以模糊控制器以EC值为主要控制对象,围绕EC值的控制进行模糊控制器设计。系统选择最常用的二维控制器,具体结构框图如图3所示,其控制精度能够满足灌溉施肥的控制要求[7],且可操作性强。
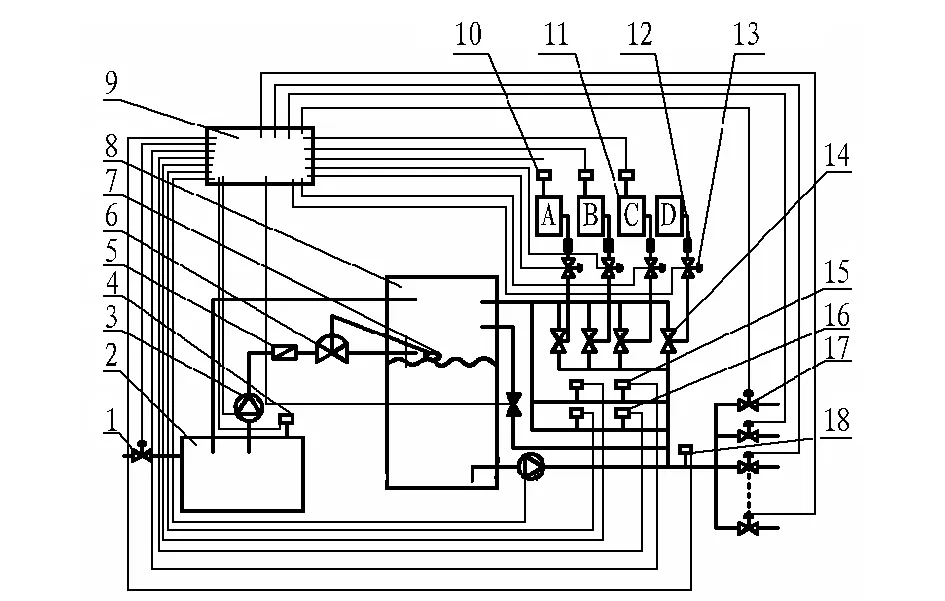
注:1.补水阀;2.回水池;3.补水泵;4.液位传感器;5.过滤器;6.水动阀;7.浮球阀;8.混合罐;9.控制装置;10.液位传感器;11.母液罐;12.过滤器;13.球阀;14.文丘里吸肥器;15.EC值传感器;16.pH传感器;17.分区电磁阀;18.流量传感器。Note: 1.Water supply valve; 2.Backwater pool; 3.Water supply pump; 4.Liquid level sensor; 5.Filter; 6.Water operated valve; 7.Float valve; 8.Mixing drum; 9.Control device; 10.Liquid level sensor; 11.Mother liquor tank; 12.Filter; 13.Ball valve; 14.Venturi fertilizer suction device; 15.EC value sensor; 16.pH value sensor; 17.Zone solenoid valve; 18.Flow transducer.图1 灌溉施肥系统结构Fig.1 The structure of irrigation and fermentation system
二维模糊控制器的2个输入变量分别为EC值偏差和偏差变化。EC值偏差e是由传感检测系统实时釆集的灌溉施肥系统的EC值dr和作物的最适宜EC值ds比较得到的,具体如式(1)所示。用当前时刻的EC值偏差e(k)和前一个EC值采样周期偏差e(k-1)作差,得到EC值偏差变化ec,具体如式(2)所示。模糊控制器的输出变量为u,输出变量的控制对象为配肥电磁阀和系统压力调节电磁阀等。

图2 灌溉施肥系统实物Fig.2 The entity of irrigation and fermentation system
e=ds-dr
(1)
ec=e(k)-e(k-1)
(2)
控制器采用双输入、单输出结构,EC值偏差e用正大、正小、零、负小和负大5个模糊语言词汇描述,分别用PB、PS、Z、NS、NB表示,变量论域为(-3,-2,-1,0,1,2,3);而偏差变化ec和控制量u用正大、正小、零、负小和负大5个模糊语言词汇描述,分别用PB、PS、Z、NS、NB表示,ec的变量论域为(-3,-2,-1, 0,1,2,3),u的变量论域为(-4,-3,-2,-1,0,1,2,3,4);依据项目实际情况确定EC值偏差e的基本论域为[-5,+5](百分比),EC值偏差变化ec的基本论域为[-2,+2](百分比),控制量u的基本论域为输出时间[0,5 min],由此得出各比例因子,K1=3/10=0.3,K2=3/2=1.5,Ku=5/8=0.625。
控制规则确定的依据是实践经验和专家的丰富知识,兼顾系统的误差控制和系统的稳定性,故以“if-and-then”条件语句形式来表达控制规则,全部控制规则共有25条语句,其中部分控制规则如下:
If (E is NB) and (EC is NB) then (U is PB)
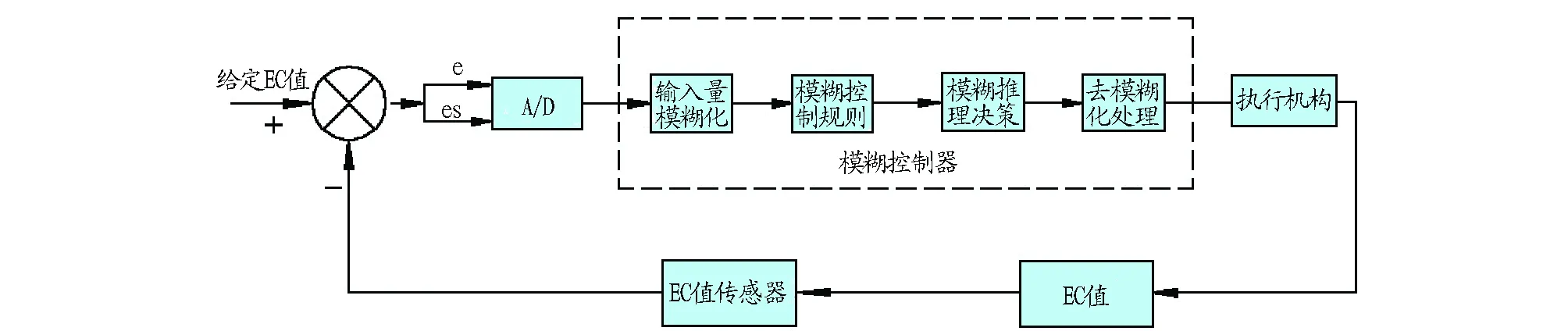
图3 EC值模糊控制器结构框图Fig.3 The structure diagram of EC value fuzzy controller
If (E is NB) and (EC is NS) then (U is PB)
If (E is NB) and (EC is Z) then (U is PB)
If (E is NB) and (EC is PS) then (U is PS)
具体控制规则如表1所示。

表1 输出变量u的模糊控制规则
3 控制装置设计
3.1 硬件设计 控制装置的硬件分为上位机和下位机2个部分,上位机选择工控机,下位机选择可编程逻辑控制器(PLC),系统硬件架构如图4所示。上位机与下位机之间的通信方式采用串行通信,上位机完成与无线传感网络通信、控制决策、数据统计分析和网页发布等任务;下位机通过传感器完成EC值、pH和流量等参数的采集、A/D转换和执行机构的控制等任务。
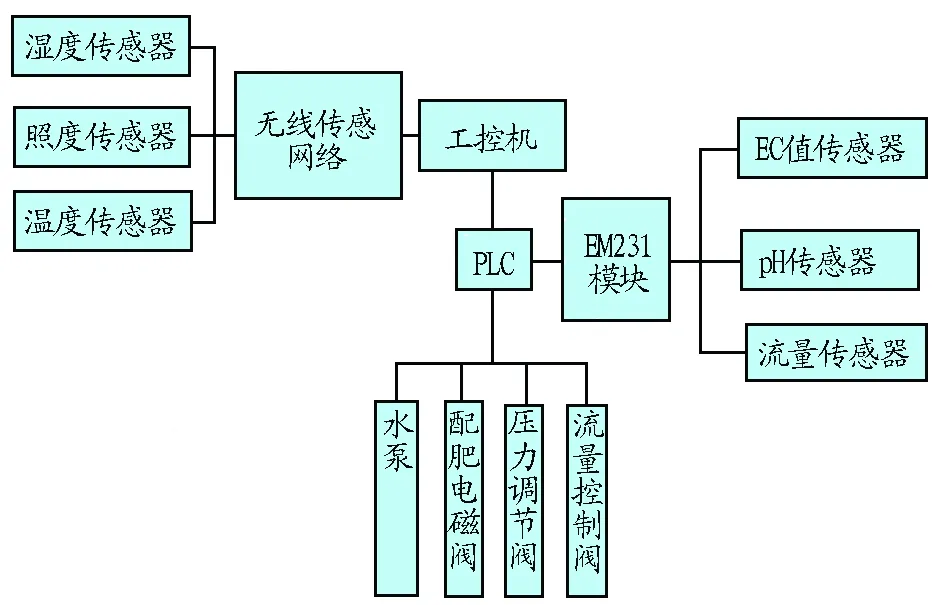
图4 控制装置硬件架构Fig.4 Hardware architecture of control device
由于作物种植区一般面积较大,参数采集点分散,为减少布线量,选用了无线传感器构建传感网络,实现温度、湿度和光照强度等环境参数的采集。传感器采集到的环境数据传送给无线网关,传输方式为基于Zigbee的无线网络传输;无线网关作为中间传输层,需要对传感器发送过来的信号进行过滤、分组、关联和聚合等操作,最终以TCP/IP数据包的形式,利用物联网技术发送到控制中心的主机上。EC值、pH和流量的监测实时性和可靠性要求高,且传感器安装在灌溉施肥系统的本体上,适宜采用更为可靠的有线传输方式。
3.2 软件设计 该系统上位机软件基于Visual Studio.net平台开发,数据库基于SQL Server 2005开发。上位机软件集无线传感网络数据处理、历史数据存储、用户管理和网络发布等功能为一体,依托部署在生产现场的各种传感节点和无线通信网络实现作物生产环境的感知和控制等,从而实现生产过程的可视化、自动化管理。上位机管理软件界面如图5所示。
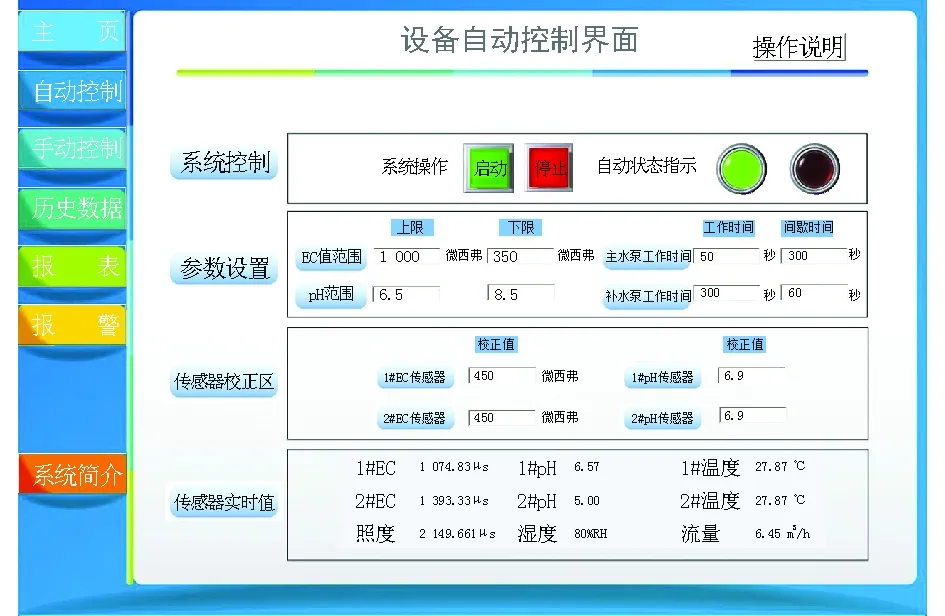
图5 系统软件界面Fig.5 System software interface
下位机软件采用西门子公司的V 4.0 STEP 7 Micro WIN-SP 9编程软件编写。程序主要功能包括灌溉施肥系统数据采集,执行机构控制、系统报警、上位机通信和工作模式控制等。
4 实例试验
系统经实地运行,系统的EC值响应曲线如图6所示(EC值传感器检测的周期为6 s)。由结果可以看出,该系统控制具有调节时间短、响应速度快的特点,能够满足生产要求,且灌溉施肥系统参数波动范围小,控制品质好。
5 结语
该研究设计的灌溉施肥系统在实地运行半年后也发现了有待进一步探索的问题:一是蒸发作用对EC值的影响较大,特别是夏日温度较高时,栽培系统的水分蒸发速度很快,对系统EC值的影响大;二是营养液流经作物根部后,作物需要的营养成分被吸收,由于营养液是循环使用的,导致被其他作物吸收较少的元素在营养液中的浓度大幅度提高,虽然总的EC值浓度可控制在设定值范围内,但有效营养元素的浓度低于检测值,且作物吸收较少的元素富集会对作物产生毒害作用。因此 ,今后仍需对该灌溉施肥系统进行进一步的改进优化,以更好地应用于实地生产中。
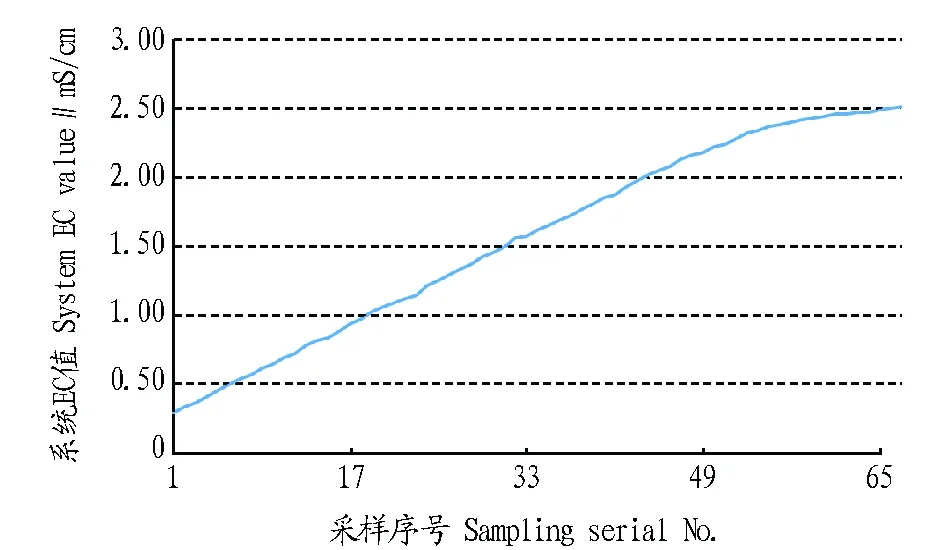
图6 系统EC值响应曲线Fig.6 Response curve of system EC value
[1] 胡继连,武华光.灌溉水资源利用管理研究[M].北京: 中国农业出版社,2007.
[2] 成自勇,张芮,魏巍,等.中国水资源存在的问题及对策[J].水利经济,2007,25(1):66-69.
[3] 宫强.中国水资源现状调查及可持续发展研究[J].理科爱好者(教育教学版), 2014, 6(2):119-120.
[4] 马达文.“双水”耦合技术的实践与探索[J].中国水产, 2013(2):32-34.
[5] 崔天时,杨广林,刘磊,等.基于模糊控制的温室灌溉控制系统的研究[J].农机化研究,2010,32(3): 84-86.
[6] 周亮亮.温室PLC模糊灌溉施肥控制系统研究[D].昆明:昆明理工大学, 2013.
[7] 何青海,孙宜田, 李青龙,等.基于模糊控制的水肥药一体化系统研究[J].农机化研究, 2015(8):203-207.
Design and Application of Irrigation and Fertilization System Based on Fuzzy Control
KONG De-zhi, SUN Chang-quan
(Jiangsu Vocational College of Agriculture and Forestry, Jurong, Jiangsu 212400)
An irrigation and fertilization system based on fuzzy control was designed.Using Internet of things technology to construct wireless sensor network, collecting data of temperature, humidity and intensity of illumination in crops growth zone, the main parameters of irrigation and fertilization system were monitored through online EC/pH sensor.After fuzzy decision, the master computer sends control commands to the slave computer, the slave computer controls the irrigation and fertilization system to realize the precise allocation of nutrient solution for irrigation and fertilization with different nutrient concentrations and different irrigation modes.
Fuzzy control; Irrigation and fertilization; PLC
江苏省农业三新工程项目(SXGC〔2016〕306)。
孔德志(1982- ),男,陕西旬阳人,讲师,从事农业自动化研究。
2016-10-17
S 27
A
0517-6611(2016)36-0230-03
