基于FMCW雷达测距的车辆防碰撞系统
2017-01-16刘军辉陈宏滨
刘军辉,陈宏滨
(桂林电子科技大学信息与通信学院,广西桂林 541004)
基于FMCW雷达测距的车辆防碰撞系统
刘军辉,陈宏滨
(桂林电子科技大学信息与通信学院,广西桂林 541004)
针对交通事故频发、驾驶员遇到潜在碰撞反应不及时,设计了一种基于雷达测距的车辆防碰撞系统。该系统以24 GHz雷达传感器为前端信号收发模块,浮点DSP芯片作为数据采样和处理核心,实时监测前车的距离和速度。雷达采用连续三角波调频方式,利用Chirp-Z算法对雷达差频信号进行频谱细化,以提高测距精度。仿真结果表明,本系统能精确获取前车距离及相对速度,实现安全预警。
车辆防碰撞;24GHz雷达;浮点DSP;三角波调频;安全预警
随着人们生活水平的提高,汽车也越来越普及,逐渐成为出行的主要交通工具。但汽车给人们带来便利的同时,也带来了许多伤害。伴随着公路上的汽车越来越多,交通事故也越来越频发。据统计,中国的交通事故率高居世界第一,每年交通事故50万起以上,因道路交通安全事故伤亡人数超过20万人。对公路交通事故的分析表明,80%以上的交通事故由司机反应不及时引起,65%的车辆相撞属于追尾相撞[1]。研究同时表明,若司机能够提前1~2s意识到危险情况并采取相应的安全措施,则绝大多数交通事故都可避免[2]。因此,如何在公路上安全行车和保障人们的生命财产安全,成为全社会广泛关注的焦点问题。安全带、安全气囊等传统被动安全设施在性能上已无更多创新,汽车主动安全相关技术则越来越受到汽车厂商的重视,各种汽车主动安全设备及系统的投入使用为保证车辆的安全行驶做出了重大贡献。汽车防撞雷达系统作为汽车主动安全的重要部分已成为主要的研究对象[3]。
汽车防撞雷达系统研究始于20世纪60年代,早期由于元器件的限制,发展非常缓慢。近年来,随着集成电路的快速发展和智能交通在全球的兴起,汽车防撞雷达系统受到越来越多的关注[4]。国际上对汽车防撞雷达系统的研究主要集中在美国、欧洲和日本等发达国家,各大汽车公司积极参与研究,先后成功研制出多种不同频段的汽车防撞雷达系统,并已投入商用。国内对汽车防撞雷达系统的研究起步较晚,目前主要为一些高校和科研机构参与研究,还处于初期阶段[5]。
根据工作原理不同,汽车防撞雷达主要分为红外雷达、超声波雷达、激光雷达和毫米波雷达。红外雷达光线传播不易扩散,环境适应性强,能全天候工作,且红外雷达系统制作成本低廉;但是红外雷达测距范围有限,只能适用短距离目标,测距范围限制了其在汽车防撞方面的应用。超声波雷达测距原理简单,成本低且制作方便,但超声波的速度容易受外界环境影响,在不同温度下,超声波的速度表现不一;同时,超声波能量衰减较大,距离越远,反射的信号越微弱,灵敏度下降很快,故只适合近距离测量。激光雷达测距范围大、测距时间短、测距精度高,但是在高速移动的汽车上容易发生幅度振动,同时激光在雾天容易被吸收且激光对人眼有害,这些不利因素限制了激光雷达在汽车防撞雷达系统的应用。毫米波雷达在汽车防撞系统中具有以下优点:1)探测性能稳定,受雨、雪、雾、强光、污尘等环境因素影响较少;2)波长短、多普勒频移大,相对速度的测量精度较高[6]。鉴于此,设计了一种基于FMCW(frequency modulation continuous wave)雷达测距的汽车主动安全系统。
1 FMCW雷达测距基本原理
FMCW雷达通过发射天线向前方发射调频连续波信号,并接收目标的反射信号来测量目标的距离和相对速度。静止目标下,反射信号和发射信号的波形相同,仅仅在时间上滞后Δt,静止目标FMCW雷达的工作方式如图1所示,FMCW雷达的调制信号为三角波调制。Δt与目标距离R的关系为

其中c为光速。反射信号与发射信号差频,得到一个差频信号Δf,由于Δt非常小,通常情况下将Δt转换到差频信号Δf上进行测量。

图1 静止目标FMCW雷达工作方式Fig.1 FMCW radar work under stationary target
由图1中的三角关系可得,

将式(2)代入式(1)中可得,

其中:T为调频连续波周期;B为调频带宽。由式(3)可知,Δf中包含目标的距离信息,只需对差频信号Δf进行处理,即可测量目标的距离R。
运动目标FMCW雷达工作方式如图2所示。当所测目标与车载雷达间存在相对速度时,接收的回波信号的载波相对于发射信号载波将产生一个频移,该频移即为多普勒频移,其值为

其中:fd为多普勒频移;λ为载波波长;vr为所测目标与雷达的相对速度[7]。

图2 运动目标FMCW雷达工作方式Fig.2 FMCW radar work under moving target
在运动目标情况下,调制三角波的上扫描和下扫描段输出的差频频率分别为:

结合式(3)、(4),目标的距离和相对速度分别为:

通过以上分析,只需在一个三角波调制周期内分别计算出上扫描差频fb+和下扫描差频fb-,便可获取当前时间前车的相对速度和距离。
2 安全距离模型
安全车距是指同一车道同向行驶的相邻车辆为保证行车安全而必须保持的行车距离。若相邻车辆的行车间距保持在安全车距以上,则很难发生追尾类安全交通事故。临界安全车距是指为保证车辆安全行驶而必须保持的最小车距。安全车距与很多因素有关,包括行车环境、车辆性能、驾驶员的反应速度等[7]。常用的安全车距模型有直接限定模型、车头时距模型、驾驶员预估模型[8]。
考虑只有在本车速度v1大于前车速度v2时,才可能发生相撞。因而本系统将安全距离模型简化为v1减速到与v2相等时,若碰撞未发生,则碰撞可以避免。车辆的安全距离模型如图3所示。
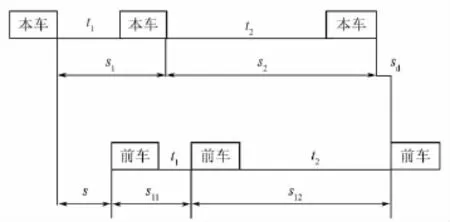
图3 安全距离模型Fig.3 Safety distance model
设s为本车和前车的安全车距,t1为本车驾驶员反应及汽车刹车系统延迟时间,t2为本车减速到与前车速度相等所需时间,sd为减速至两车相对静止时的车距。在t1时间段,前车和本车都保持当前的速度运动,本车行驶距离为

前车行驶距离为

在t2时间段,本车减速,前车仍然保持速度v2,且在t2时间内,本车速度由v1减至v2,考虑为匀减速,本车的最大减速度为amax。根据运动学知识,

在减速阶段t2时间内,本车行驶距离为

前车行驶距离为

减速完成后,需保持两车的跟车距离sd,

其中:M为跟车系数,通常由经验得到;s0为最小停车距离,通常规定为2m[9]。
参考图3的安全距离模型,安全行车距离

结合式(9)~(14),式(15)可以简化为

其中,Δv=v1-v2为相对速度。根据以上分析可知,安全行车距离主要由Δv决定。将防撞雷达系统所测的距离R与安全距离s对比,若R≤s,则表明当前处于危险状态,系统自动报警。
3 系统构架
本系统以德国Innosent公司生产的IVS-179雷达传感器作为24GHz雷达前端,负责发射和接收雷达信号;TI公司的TMS320F28335控制DAC模块产生雷达模块工作所需的三角波调制信号,三角波调制信号进入IVS-179的输入端,IVS-179的输出端经过高通滤波和放大电路后,输入到TMS320F28335的AD引脚进行采样和FFT处理,从而获取前车的相对速度和距离信息。基于雷达测距的车辆防碰撞系统结构如图4所示,整个系统主要由24GHz雷达模块、DAC模块、高通滤波电路、放大电路及DSP采样和信号处理部分构成。
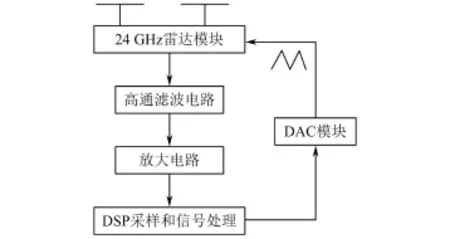
图4 系统结构Fig.4 system structure
3.1 24GHz雷达模块
IVS-179雷达传感器是德国Innosent公司生产的24GHz带VCO的雷达收发器,是一款应用广泛的窄波束雷达传感器。由于采用平面微带天线结构,IVS-179的体积非常小,适合在汽车上安装。IVS-179传感器电路主要由信号源、混频输出和信号收发部分构成。其中信号源包括VCO和供压源,VCO用于接收三角波调制信号,实现FMCW工作模式,供电源采用5V电压供电。IVS-179雷达的工作原理为:VCO接收三角波调频信号后,输出一个发射信号,发射信号分成2路,一路经发射天线发射出去,另一路进入混频器;接收天线接收到回波信号,经去噪和放大处理后,进入混频器与发射信号进行混频,最终形成差频信号。
3.2 DAC模块
本系统选用DAC8563芯片产生周期三角波信号作为雷达模块的调制信号。DAC8563是TI公司推出的一款16位、双通道,输入电压为2.7~5.5V,且具有高速SPI接口的数模转换芯片。DAC模块与TMS320F28335通过SPI接口连接,TMS320F28335通过SPI向DAC8563的寄存器发送相关命令,控制DAC8563产生三角波调制信号。
3.3 高通滤波和放大电路
在对差频信号采样和数字处理前,需对差频信号进行滤波和放大处理。24GHz雷达模块由于受到三角波调制,调制信号的频率为100Hz,所以采用截止频率为1kHz的高通滤波器,即选用高通截止频率为调制频率的10倍。由于多反馈有源滤波器具有集成度高、增益高、Q值高等优点,同时,有源滤波器相比简单的无源滤波器具有更小的衰减和更小的体积[10]。本系统采用有源运放芯片LM358设计的二阶高通滤波器。
通过解调滤波后的差频信号为微弱类信号,与目标的距离成反比。由于雷达模块混频器输出的信号幅度范围很小,距离远的回波信号幅度比距离近的回波信号幅度小,若对回波信号直接进行AD采样,幅度大的回波信号会淹没幅度小的回波信号[11],因此在采样前必须对中频信号进行放大。本系统中,由于雷达前端模块的限制,中频放大的增益不能超过60 dB;同时TMS320F28335的AD采样电压不能超过3 V,否则会烧坏芯片。考虑到近距离和远距离幅度范围变换较大,若采用固定放大增益,则可能使AD采样的输入电压超过安全范围。相反,采用自动增益控制(AGC)电路可以随输入信号的幅度自动调节其增益,达到输出电压稳定在一定范围内。本系统选用的AD603芯片是ADI公司继AD600后推出的一款低噪声、宽频带、高增益的压控VGA芯片,其增益与控制电压呈线性关系,可调增益范围为9~51dB。为了使增益达到+60dB,系统采用2片AD603芯片顺序级联,放大增益以满足系统需求。
3.4 DSP采样和信号处理
本系统采用TI公司生产的TMS320F28335作为数字信号核心处理器,相比于2000系列的其他芯片,TMS320F28335增加了浮点计算内核,提高了复杂计算的能力。该处理器具有如下优点:
1)32位浮点DSP,处理器主频高达150MHz,CPU指令周期6.67ns,指令执行速度快;
2)片上存储大,包括256K×16位的FLASH,34K×16位SRAM,还具有外部存储器扩展接口XINTF;
3)片上外设丰富,其中包括18路PWM,16通道ADC,3通道SCI,88个通用输入/输出接口,1通道SPI等。
TMS320F28335片内集成了一个12位的模数转换器,通过多路复用可以配置成16通道模拟输入;采样频率最高可配置为12.5MHz;多种触发源启动ADC转换。
系统中,TMS320F28335控制DAC模块产生周期为10ms、幅度为3~8V的三角波信号,通过三角波对雷达模块进行调频。同时,TMS320F28335控制AD以2MHz的采样频率对雷达的差频信号采样。由于三角波调频和AD采样需要同步,才能正确获取上下扫频段的差频频率;系统采用定时器中断0控制DAC模块产生三角波,定时器中断间隔为10 ms。定时器中断函数内,每产生一个DAC值,ADC进行一次采样并保存在一个临时数组中。当数组中的采样点数达到1024点,程序进入FFT算法部分,通过对1024的采样点数进行FFT变化,即可计算出上扫频段频率,同样方法计算出下扫频段频率。根据式(7)、(8)计算当前车距和相对车速,从而实现安全预警。
系统软件流程如图5所示。启动系统并初始化后进入AD采样,经FFT变换和谱峰搜索获取频率信息,根据频率计算出相对速度和车距,以此判断车辆的安全状况。
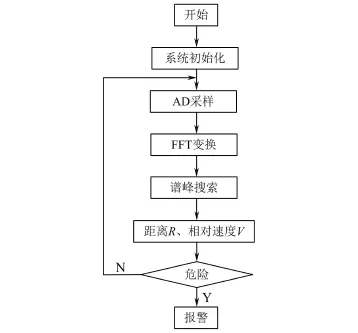
图5 系统软件流程Fig.5 System software process
4 系统仿真及结果分析
IVS-179中心频率为24GHz,最大调频带宽为250MHz,三角波调制信号周期为10ms,AD采样频率为1MHz,系统最大测量距离为150m,最大测量速度为200km/h。根据以上参数建立FMCW雷达系统模型,通过Matlab软件完成了系统模型的仿真。图6为车距90m、速度90km/h的上下扫频段的频谱。

图6 差频信号频谱Fig.6 Spectrum of beat frequency signal
在图6中,上扫描差频频率约为34.18kHz,下扫描差频频率约为26.367kHz。根据式(7)、(8)可以测出当前车距为90.82m,车速为87.89km/h。表1为3组不同距离和速度下的仿真数据及测量误差。从表1可看出,直接对差频信号进行FFT变换产生的误差较大。
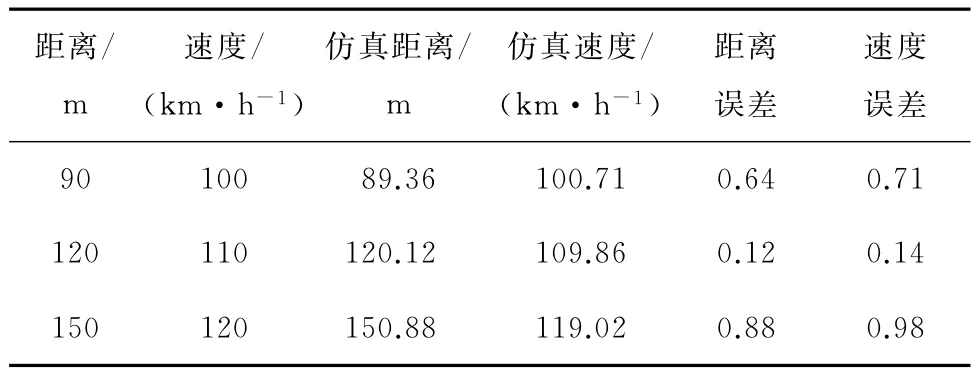
表1 3组距离和速度下的仿真数据Tab.1 Simulation data for three distances and speeds
系统误差主要由FFT的栅栏效益产生。直接对N点进行FFT变换具有固定的频率间隔fs/N,其中fs为采样频率。增加采样点N可以提高频谱分辨率,但系统的运算量和内存也会增大,在实时系统中对系统的性能影响很大。为此,出现了各种不同原理的频谱细化和校准方法,综合比较各方法,本系统采用Chirp-Z方法进行频谱细化。
Chirp-Z是一种在Z平面沿着一段螺旋线均匀采样的Z变换方法。基本原理是在一段螺旋线上选取频率起始点和螺旋参数,确定采样频率和采样点数,对此段频带进行局部Z变换[12]。通过FFT粗略计算出频谱谱峰所在位置,以此谱峰位置的前一点所对应频率为Chirp-Z的起始频率进行频谱细化。表2为经Chirp-Z频谱细化后3组不同距离和速度的仿真数据。对表2和表1仿真结果对比发现,Chirp-Z算法对系统精度有一定的优化作用。

表2 Chirp-Z优化后的仿真数据Tab.2 Simulation data under Chirp-Z optimization
5 结束语
针对交通安全事故日趋增多,设计了一种以24 GHz雷达为数据收发模块、浮点 DSP芯片TMS320F28335为核心处理器的车辆防碰撞系统,并通过Matlab软件对系统模型进行仿真验证。仿真结果表明,连续三角波调制的雷达仿真系统能够较准确地获取本车与前车的车距和相对车速;同时,由于采样间隔的限制,系统存在一定的误差;在不增加采样点数的情况下,Chirp-Z能提高测距精度。对于汽车防撞雷达系统而言,现阶段主要技术难题是如何提高测距精度和避免虚漏警。下一步将对如何减少虚警和漏警进行研究,并在实际环境中进行测试。随着汽车保有量的快速增加,车辆防碰撞系统在未来必定拥有广阔的市场空间。
[1] 陈勇,黄席樾,杨尚罡.汽车防撞预警系统的研究与发展[J].计算机仿真,2006,23(12):239-243.
[2] WU Yurong,WANG Congling,LI Xunbo,et al.Study on automotive anti-collision radar system and its signal processing algorithm[C]//IEEE of International Forum on Information Technology and Applications,2009:586-590.
[3] EUGIN H,KIM Sang-dong,CHIHO P,et al.Automotive FMCW radar with adaptive range resolution[C]//Second International Conference on Future Generation Communication and Networking Symposia,2008:130-133.
[4] 黄文奎.毫米波汽车防撞雷达的设计与实现[D].上海:中国科学院上海微系统与信息技术研究所,2006:5-6.
[5] 梁品,陈照章,于敬泉.基于DSP的汽车防撞雷达及其信号处理[J].微电子学,2007,37(5):628-635.
[6] 钟勇,姚剑峰.现代汽车的四种测距方法[J].汽车工业研究,2001(2):38-40.
[7] 李飞,曹峰,高一栋,等.汽车防撞雷达报警算法[J].现代雷达,2013,35(12):31-37.
[8] 刘刚,侯德藻,李克强,等.汽车主动避撞系统安全报警算法[J].清华大学学报(自然科学版),2004,44(5):697-700.
[9] 丁祥.基于DSP的汽车防撞雷达信号处理的设计与实现[D].西安:西安电子科技大学,2014:12-13.
[10] 姜兴,刘涛.24GHz车载防撞雷达及中频信号处理电路设计[J].微型机与应用,2014,33(1):56-59.
[11] 高香梅.FMCW防撞雷达系统中频信号处理的软硬件关键技术研究[D].合肥:合肥工业大学,2013:18-19.
[12] 陈祝明,丁义元,向敬成.采用Chirp-Z变换提高LFMCW雷达的测距离精度[J].信号处理,2002,18(2):106-112.
编辑:梁王欢
A vehicle anti-collision system based on FMCW radar ranging
LIU Junhui,CHEN Hongbin
(School of Information and Communication Engineering,Guilin University of Electronic Technology,Guilin 541004,China)
Aiming at the frequent traffic accidents,the driver encounters a potential collision is not timely,a vehicle anti-collision system is designed based on radar ranging.The system uses 24GHz radar sensor for the front-end signal transceiver module,floating-point DSP chip as the core sampling and processing of data.Radar uses a continuous triangle wave frequency modulation and applies Chirp-Z algorithm for spectrum refinement of radar beat frequency signal to improve the range accuracy.Simulation results show that the system can effectively get the distance and the relative speed of the vehicle in front,and achieve security warning.
vehicle anti-collision;24GHz radar;floating-point DSP;triangular wave modulation;security warning
TN953
:A
:1673-808X(2016)05-0349-06
2016-03-31
国家自然科学基金(61162008)
陈宏滨(1981-),男,湖南邵阳人,教授,博士,研究方向为传感器网络、认知无线电。E-mail:chbscut@guet.edu.cn
刘军辉,陈宏滨.基于FMCW雷达测距的车辆防碰撞系统[J].桂林电子科技大学学报,2016,36(5):349-354.