纯电动车用无刷直流电机控制系统的设计
2017-01-16周卫明张向文
周卫明,张向文,2
(1.桂林电子科技大学电子工程与自动化学院,广西桂林 541004;2.桂林电子科技大学广西自动检测技术与仪器重点实验室,广西桂林 541004)
纯电动车用无刷直流电机控制系统的设计
周卫明1,张向文1,2
(1.桂林电子科技大学电子工程与自动化学院,广西桂林 541004;2.桂林电子科技大学广西自动检测技术与仪器重点实验室,广西桂林 541004)
针对纯电动汽车用无刷直流电机(BLDCM)控制系统的要求,设计了一款以TMS320F2812为核心的控制系统。控制系统利用DSP产生的6路PWM信号实时调控电机转动,并通过占空比实现高精度转速调节。系统软件采用中断方式编程。测试结果表明,本控制系统的响应速度快,转速稳定,且稳态误差小。
无刷直流电机;TMS320F2812;控制系统
电动汽车具有行驶噪声低、能量利用效率高、无污染物排放等优点。随着传统资源日益枯竭、环境污染加剧,电动汽车必将成为人们生活中必不可少的绿色交通工具。无刷直流电机具有结构简单、运行可靠和维护方便等优点,是一种理想的变速电机,在电动汽车领域应用广泛[1-3]。由于无刷直流电机控制系统较复杂,且稳定性要求较高,常采用数字信号处理器DSP等高端芯片设计控制器[4-5]。信号处理器DSP是一种可实现实时信号处理的微处理器,具有丰富的I/O接口、PWM输出、可实现复杂的控制算法等功能。段丽娜等[6]对控制系统的硬件结构进行了设计,完成了PWM波形的测试,但未对整个系统进行测试;刘明等[7]研究了自适应模糊PID控制算法在无刷直流电机控制中的应用,但只进行了Simulink仿真分析,未进行实际电机控制器测试;崔方等[8]以dsPIC30F4012为控制核心设计了电动汽车用BLDCM控制系统,控制系统采用了PID控制算法,转矩波动大。为此,采用专用芯片TMS320F2812设计了纯电动车用无刷直流电机控制系统,以满足实时性好、精度高、稳定性好的要求。
1 系统总设计框图
控制系统整体框架如图1所示。控制系统主要包括DSP2812主控模块、PWM信号处理模块、驱动电路、功率电路、电池电压检测、母线电流采样、电源电路、转把信号采集、转子位置信号处理。其中,DSP2812主控模块的事务管理器EVA的比较单元产生PWM信号,捕获模块获取转子位置传感器的电平状态,根据霍尔传感器输出的电平状态控制电机换相;PWM信号处理模块对PWM信号进行隔离处理;驱动电路根据PWM信号控制功率电路的导通;母线电流采样实现电流检测和过流保护功能;转子位置信号处理实现对霍尔传感器输出的电平信号的整形处理。
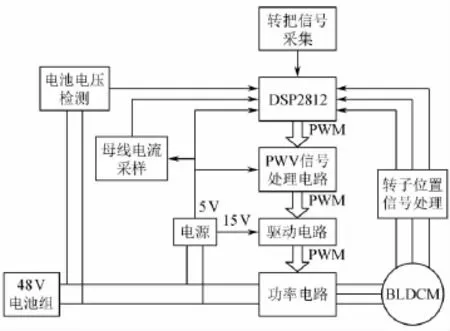
图1 控制系统总体框架Fig.1 The framework of control system
2 硬件电路设计
2.1 PWM信号隔离电路设计
控制电路输出的PWM信号用于控制功率电路的导通。为防止高电压、大电流信号对PWM信号的干扰,提高PWM信号驱动负载的能力,对PWM信号进行了隔离处理。本设计采用光电隔离芯片6N137,光耦隔离电路如图2所示。PWM信号从6N137的2号引脚输入,输出端经过上拉电阻R29上拉,输出隔离后的PWM信号。

图2 光耦隔离电路Fig.2 The optocoupler isolation circuit
2.2 驱动电路设计
经过光耦隔离后的PWM信号不能直接作为驱动功率电路的开关信号,需经过驱动电路的变换。本控制系统采用了IR2136芯片构成的集成式驱动电路。IR2136为高功率、高速的MOSFET和IGBT驱动器,有3对独立的高压侧和低压侧输出通道为三相所应用,采用自举电压技术,实现了对功率电路的驱动。
驱动电路如图3所示。ITRIP引脚为IR2136芯片的过流检测引脚,由芯片内部结构决定。当ITRIP引脚的电压低于0.5V时,电路正常工作。当ITRIP引脚的电压高于0.5V时,电路过流,此时芯片内部产生2路信号:1)使FAULT引脚输出为低电平,FAULT引脚与DSP2812的外部中断引脚连接,产生中断,禁止控制芯片的PWM信号输出;2)关断上桥臂的3路MOSFET管,使电机停止转动,同时对电路起保护作用。电路中的二极管为快恢复二极管,电容C49为钽电容,起自举升压的作用。
2.3 转子位置信号检测处理电路设计
无刷直流电机自带电机转子位置传感器,利用霍尔效应检测电机磁极的位置。电机转子位置信号处理电路如图4所示。霍尔信号经过施密特触发器74HC14整形,再经滤波电容滤波,消除信号中的噪声,得到5V的霍尔反馈输出信号。由于DSP2812的端口输入电压小于3.2V,5V的霍尔反馈信号需要经过电阻的分压处理,图4中的R10和R18实现了分压。
2.4 电流采样电路设计
通过电流采样电路的采样,得到电路实际的电流值。根据电机的运动状态,通过电流环更新PWM波形的输出,控制电机的运动状态。电机在超过额定电流的条件下工作时间过长会烧坏电路中的元器件,因此,应时刻监测电路中的电流。
本控制系统采用电阻电流采样法,选取10mΩ的康铜丝电阻,将采集电路中的电流转变为电压。电流采样电路如图5所示。PV-是功率电路MOSFET源极引出节点,R33采样电阻两端的电压先经过R26和C43组成的滤波电路滤波,进入LM358运算放大器进行信号放大处理。电路采用了二级运算放大,R24是阻值为1kΩ的电阻,R22为20kΩ的可调电阻。另外,DSP2812的ADC的模拟电压信号采样范围为0~3V,调节可变电阻R21和R22,所得到的采样电压信号可直接接入到DSP2812的ADC采集引脚。

图3 驱动电路Fig.3 The drive circuit

图4 电机转子位置信号处理电路Fig.4 The rotor position signal processing circuit

图5 电流采样电路Fig.5 The current sampling circuit
2.5 调速信号采集电路设计
在外部接入的调速信号,实现对电机速度的自动调节。通过控制系统模拟信号采集ADC接口,对外部输入的模拟电压信号进行采集,与电机给定转速值相对应,实现电机的调速。调速信号采集电路如图6所示。调速信号从P10接口接入,从3号引脚输出0.528~4.52V的线性电压。通过R19和R20的分压,把所得到的电压接入到DSP2812的ADC引脚。
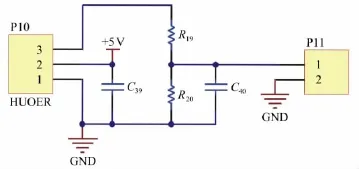
图6 调速信号采集电路Fig.6 The speed signal sampling circuit
3 软件程序设计
软件系统主要由一个主程序和一个中断子程序组成。其主要包括霍尔位置检测程序、速度计算程序、位置采样程序、控制算法程序、ADC采样程序、斜坡控制计算程序、PWM产生程序、PWM输出程序、串口转速输出程序。
3.1 主程序设计
主程序主要完成系统初始化,主程序流程图如图7所示。主程序的主要功能:1)引用头文件,定义需要的常量、变量,定义功能模块;2)对DSP系统进行初始化,产生内部工作时钟;3)关闭系统的总中断,初始化中断向量表,对终端进行配置,对事务管理器及功能模块参数初始化;4)使能中断,让程序进入循环等待,等待中断程序运行。

图7 主程序流程图Fig.7 The flow chart of main program
3.2 中断子程序设计
从实际程序功能来看,中断程序调用了所有函数控制电机的运动状态。根据电机状态运行的过程,在中断子程序中先后对各个函数进行调用,即对电机所需要的状态值调整。中断子程序流程图如图8所示。首先调用ADC采集函数,一个通道检测电路中的电流值作为电流环的电流实际值,另一个通道检测外部转速给定值,给定值代表电机的给定转速,表示所设定的电机转速;再调用斜坡控制函数,用于PWM波占空比由零逐渐增大,控制电机软启动;调用霍尔检测函数,检测转子的位置状态;调用计数器函数,记录电机转子的位置状态;调用斜坡控制函数,防止控制采集所给定的电机转速参考值的突变,起缓冲作用;调用速度计算函数,计算电机实际转速;调用双闭环滑模PID控制函数,输出PWM波的比较值;调用PWM信号产生函数,根据所得到的PWM比较单元的比较值更新PWM波形占空比输出。中断子程序运用了事务管理器EVA定时器2的周期中断,中断频率设置为20kHz。
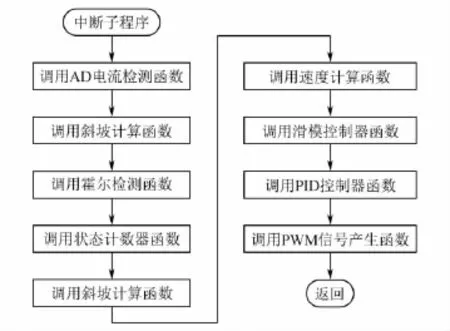
图8 中断子程序流程图Fig.8 The flow chart of interrupt program
4 试验结果与分析
在完成系统的软硬件设计后,将控制器与电池、电机连接,搭建实验平台,电机控制系统实物图如图9所示。本驱动控制系统选用浙江尤耐特电机公司生产的无刷直流电动机,其额定功率为1.5kW,额定电压为48V,额定电流为39A。

图9 电机控制系统实物图Fig.9 The physical map of motor control system
在电机的启动、加速、减速过程中,电机的转速波形如图10~12所示。图10为给定转速1400r/min的电机启动过程转速波形;图11为转速500~1500 r/min的电机加速过程转速波形;图12为速度1500~800r/min的电机减速过程转速波形。从图10~12可看出,本控制系统的响应速度快,转速稳定,且稳态误差小。
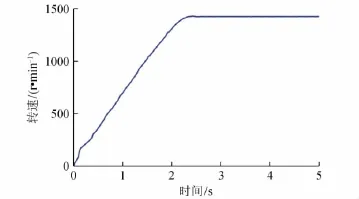
图10 电机启动过程转速波形Fig.10 The speed waveform of motor starting process

图11 电机加速过程转速波形Fig.11 The speed waveform of motor acceleration process
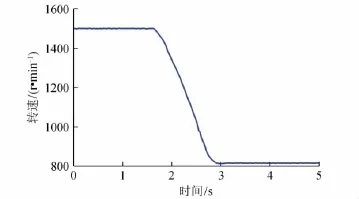
图12 电机减速过程转速波形Fig.12 The speed waveform of motor deceleration process
5 结束语
针对纯电动汽车用无刷直流电机(BLDCM)控制系统的要求,以TMS320F2812为核心,设计并实现了无刷直流电机控制系统。系统围绕DSP2812进行了硬件电路的设计,并根据硬件结构进行软件设计。利用了高性能的DSP2812芯片进行全数字化精确控制策略控制,既简化了传统的复杂硬件电路连接,又大幅提高了系统的可靠性。实验测试表明,基于TMS320F2812设计的纯电动汽车用无刷直流电机控制系统具有良好的动态性能,响应速度快,转速稳定,且稳态误差小。
[1] XIA C L,XIAO Y W,CHEN W,et al.Torque ripple reduction in brushless DC drives based on reference current optimization using integral variable structure control[J].IEEE Transaction Industrial Electronics,2014,61(2):738-752.
[2] 汪俊杰,周波.基于前馈控制的BLDCM滑模变结构调速系统[J].电工技术学报,2008,23(8):41-46.
[3] 李晓飞,赵敏,刘新妹,等.基于DSP的平面电机控制系统设计[J].微特电机,2013,44(9):50-52.
[4] 张深.无刷直流电动机与原理及应用[M].北京:机械工业出版社,2001:57-62.
[5] 夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009:182-196.
[6] 段丽娜,赵金.基于DSP的无刷直流电机控制系统的研究[J].微电机,2014,47(3):60-63.
[7] 刘明,宋弘.自适应模糊PID智能控制器在无刷直流电机速度控制系统中的应用[J].电机与控制应用,2012,39(11):22-25.
[8] 崔方,刘芳华,邱忠华,等.基于DSP的电动车用无刷直流电机控制器的设计[J].电机与控制应用,2014,41(4):52-56.
编辑:翁史振
BLDCM control system for pure electric vehicle
ZHOU Weiming1,ZHANG Xiangwen1,2
(1.School of Electronic Engineering and Automation,Guilin University of Electronic Technology,Guilin 541004,China;2.Guangxi Key Laboratory of Automatic Detecting Technology and Instruments,Guilin University of Electronic Technology,Guilin 541004,China)
According to the requirement of brushless direct current motor(BLDCM)control system for pure electric vehicle,a control system with TMS320F2812is designed.Six channel PWM signals are generated by DSP to control the rotation of the motor,and the high precision speed regulation is realized through the variation of duty cycle.The system software adopts interrupt programming.The test results show that the response of the control system is fast,the speed is stable,and the steady state error is small.
brushless direct current motor;TMS320F2812;control system
TM351
:A
:1673-808X(2016)05-0391-05
2016-02-26
国家自然科学基金(51465011);广西自然科学基金(2014GXNSFAA118377);广西自动检测技术与仪器重点实验室基金(YQ14111)
张向文(1976-),男,河南南阳人,研究员,博士,研究方向为汽车电子、智能控制与信号处理。E-mail:zxw@guet.edu.cn
周卫明,张向文.纯电动车用无刷直流电机控制系统的设计[J].桂林电子科技大学学报,2016,36(5):391-395.