一种空间微动目标宽带雷达干涉三维成像方法
2017-01-09陈春晖孙玉雪
陈春晖 张 群 罗 迎 孙玉雪
一种空间微动目标宽带雷达干涉三维成像方法
陈春晖 张 群*罗 迎 孙玉雪
(空军工程大学信息与导航学院 西安 710077) (信息感知技术协同创新中心 西安 710077)
空间微动目标3维成像在目标特征信息感知方面具有优势,对于实施空间目标成像、分类、识别等任务具有重要现实意义。据此,该文针对L型天线阵列成像系统,提出一种基于改进的粒子群优化的空间微动目标宽带雷达干涉式3维成像方法。首先,分析了目标回波信号的微多普勒特性,建立参数化表征模型。其次,基于所提优化算法重构各天线回波信号的微多普勒相位项,通过对各回波信号相位项的干涉处理,获得干涉相位差,并推导干涉相位差与目标空间坐标的关系,从而重构真实3维坐标,获得微动目标3维图像。相较于已有方法,所提方法基于干涉式成像思想,在无遮挡和有遮挡效应的条件下,均可重构微动目标真实空间坐标和3维图像,并且具有较好的鲁棒性。最后,仿真计算验证了该方法的有效性。
雷达信号处理;3维成像;干涉成像;微动目标;微多普勒效应
1 引言
随着航空航天技术的不断发展,各类空间目标的数量急剧增加,如何有效实现对空间目标的探测、跟踪、成像与识别等引起了广泛关注。空间目标,如弹道导弹、太空碎片等,通常具有自旋、锥旋和进动等多种微动形式,在雷达回波信号中产生微多普勒效应[1,2]。据此开展对空间微动目标成像方面的研究,对于保障我国空间安全等具有重要现实意义[3]。
在对空间微动目标成像的研究中,相较于采用逆合成孔径雷达(Inverse Synthetic Aperture Radar, ISAR)实现目标2维成像[4],3维成像在对目标外形、体积、微动参数等信息的感知方面具有显著优势[5]。对于基于单基雷达的运动目标3维成像方法[6,7],由于仅能观测到目标在雷达径向距离上的微动分量,因此,获得的3维成像结果,不能确定目标的真实空间位置,需要利用目标相对于雷达的姿态信息,才能实现3维成像结果的准确定标。对于基于双/多基地雷达的运动目标3维成像方法[8,9],目标散射中心各向异性、遮挡效应等情况,将增加各雷达回波信号联合处理的复杂性。此外,由于需要同时对多部雷达的回波信号进行联合处理,系统的实现也较复杂。近年来,将干涉技术与ISAR成像相结合,组成干涉成像系统,为实现运动目标的3维成像提供了新途径,比如基于L型阵列天线的干涉式成像系统。由已有文献[10-13]的研究结果可知,对于惰性刚体运动目标,通过干涉式成像技术获得目标3维图像,具有与目标的物理尺寸相一致,能够有效反映不受运动姿态影响的目标稳健特征信息等优势,可为空间目标分类、识别等提供有力的信息支撑。
在已有文献的研究中,鲜有将干涉式成像方法用于实现空间微动目标3维成像,基于干涉式成像方法在3维成像研究中的优势,本文将干涉成像的思想引入对空间微动目标3维成像的研究工作中。对于空间微动目标,受限于雷达系统的脉冲重复频率(Pulse Repetition Frequency, PRF),在ISAR成像所需小转角内的有效回波数量往往较少,使得传统的ISAR成像效果不理想,无法有效区分各目标散射点,从而影响干涉处理,因此,已有的干涉式成像方法无法直接用于实现空间微动目标3维成像。针对该问题,充分利用宽带信号条件下由目标微动所引起的回波信号调制特征差异,从而区分各散射点的回波信号,进行有效的干涉处理。以空间自旋目标为例,基于L型天线阵列成像系统,提出了一种基于改进的粒子群优化的空间微动目标宽带雷达干涉式3维成像方法,有效克服了单基雷达3维成像中难以获得目标真实空间坐标和双/多基地雷达3维成像中多部雷达回波信号联合处理复杂等问题。
2 微动目标回波信号模型
基于L型天线阵列干涉式成像系统如图1中所示,坐标系为雷达坐标系,收发一体天线A位于坐标原点(0, 0, 0)处。天线A和接收天线B, C构成两对分别沿着轴和轴方向的相互垂直的干涉基线,基线长度为。接收天线B和C分别位于(, 0, 0)和(0, 0,)处。坐标系为参考坐标系,平行于雷达坐标系,在目标运动的起始时刻,坐标原点在雷达坐标系中的坐标为(0,0,0),其方位角和仰角分别为和,点到天线A的位移矢量为A0。坐标系为目标本地坐标系,其原点与参考坐标系相同,为目标中心。空间自旋目标平动速度为,以角速度和绕轴、轴和轴做旋转运动,其在目标本地坐标系中的角速度矢量为,其在参考坐标系中的角速度矢量为。假设点为目标上的一个散射点,在起始时刻,在目标本地坐标系中的位置矢量为,在参考坐标系中的位置矢量为。目标本地坐标系和参考坐标系之间的关系为,其中,init为欧拉旋转矩阵[14]。

图1 干涉式成像系统及目标模型
雷达发射线性调频(Linear Frequency Modulation, LFM)信号为

(2)

图2 第k个散射点空间旋转运动及其与雷达之间的空间几何关系投影图

干涉式成像方法常用于对非合作运动目标进行3维成像,对于目标分类和识别等具有重要意义。在已有研究中,鲜有将干涉式成像方法用于实现微动目标3维成像。本文将干涉式成像思想用于空间微动目标3维成像。基于干涉式成像思想,对第个散射点,将天线A, B和C在距离-慢时间域的回波信号进行干涉处理,可得到干涉相位差为
(5)
其中,Angle(·)表示取复数相位。得到第个散射点对于不同天线的干涉相位差后,可重构其在参考坐标系轴和轴的坐标位置分别为

(7)
其在参考坐标系轴的坐标位置,可直接对距离-慢时间像进行处理后获得,具体方法在第3.2节中进行分析。由此,在远场条件下,可获得t时刻,第个散射点在参考坐标系中的真实坐标。对目标上所有强散射点进行干涉式成像处理后,即可获得空间微动目标的3维图像。
3 干涉式3维成像方法
3.1 改进的单纯形粒子群优化算法
由式(6),式(7)可知,干涉式成像方法是通过不同天线之间的干涉相位差获得目标在参考坐标系中的真实坐标位置,因此,准确重构目标在参考坐标系中的真实坐标与获得干涉相位差关系密切,如何有效获得干涉相位信息成为实现干涉式3维成像的关键。已有的微动目标参数估计方法[15],比如利用Hough变换方法提取微动目标参数[16],并不适用于对干涉相位信息的处理。为了有效获取干涉相位信息,本文提出一种改进的单纯形粒子群算法,对目标的特征参数进行估计,从而重构目标干涉相位信息,实现空间微动目标3维成像。
将收缩因子引入粒子群算法(Particle Swarm Optimization, PSO)算法,形成带收缩因子的PSO算法(Constriction Factor PSO, CFPSO),可对,1,2的取值进行选择,参数的引入平衡了群体的搜索能力和探索能力。在原有更新原则的基础上乘一个收缩因子,其更新规则为

(9)
3.2 干涉式3维成像算法
以第个散射点为例,干涉式3维成像算法具体步骤如下:
步骤2 对回波信号的距离-慢时间像,利用数学形态学中的骨架提取算法进行处理;
步骤3 根据骨架提取算法得到的结果,取第t时刻的回波信号,和;
步骤5 利用改进的单纯形粒子群算法分别估计第个散射点的参数Ak,Bk,Ck,Ak,Bk,Ck,,;
步骤7 根据式(4),式(5)进行干涉处理,计算干涉相位差和;
步骤8 根据式(6),式(7)计算第个散射点在参考坐标系轴和轴的坐标位置和;
步骤9 由1维距离像获得第个散射点在参考坐标系轴的坐标位置;
步骤10 根据获得的第个散射点在参考坐标系中的坐标(,,)重构3维图像。
对于目标上的个散射点,可同时重构其在参考坐标系中的坐标(,,),,从而获得目标3维图像。
4 仿真实验与分析
4.1 仿真实验
雷达发射LFM信号,中心频率f为10 GHz,带宽为300 MHz,成像时间为1 s,脉冲重复频率PRF为1000 Hz,脉宽T为,调频率为。径向距离分辨率为0.5 m,横向距离分辨率为0.5 m。基线长度为200 m,天线A, B和C在雷达坐标系中的坐标分别为(0, 0, 0) m, (200, 0, 0) m和(0, 0, 200) m。在初始时刻,目标与雷达距离为500 km,3个散射点的旋转中心在参考坐标系中的坐标分别为(0, 5.000, 0) m, (0, 2.000, 0) m和(0, -5.000, 0) m,旋转角速度矢量为,位置矢量0分别为(4.000, 1.000, 4.000) m, (2.899, 6.450, -4.450) m和(-6.900, -5.450, 0.450) m,旋转半径矢量为(4.000, -4.000 4.000) m。
4.1.1 无遮挡效应 对于目标散射中心无遮挡情况,在成像时间内,散射点的旋转轨迹包络是连续完整的。由于天线A, B和C之间的距离相对于雷达与目标之间的距离较小,所以在实图像域,对于天线A, B和C得到的同一个散射点的距离-慢时间像差别较小。在成像时间内,目标散射点在参考坐标系轴,轴和轴的理论坐标,如图3所示。
下面利用所提干涉式3维成像方法对目标模型进行仿真实验。对天线A, B和C的回波信号进行分别处理后,可得到目标模型的距离-慢时间像,利用数学形态学中的骨架提取算法对其进行处理。然后,选取任意一个慢时间点,获得图像中对应的非零元素在回波信号矩阵中的位置,提取天线A对于目标散射点在快时间频率域的回波信号值。类似地,可提取天线B和C对于目标散射点在快时间频率域的回波信号值和。采用文中所提方法对,和进行处理。以散射点1为例,获得各参数粗估计结果为,对各参数估计结果扩展+/-10%,可得参数估计区间分别为[4.50, 5.50] m,[4.41, 5.39] m,[2.52, 3.08],[3.33, 4.07],利用所提算法对目标参数进行估计,过程如图4所示。由图4可知,在估计过程中多次出现了局部极值点和停滞问题,所提方法有效地跳出了局部极值点,解决了停滞问题,最终寻找到全局最优解。基于所得参数,计算,和。根据式(4),式(5),由所提方法可得到散射点1的干涉相位差和。再根据式(6),式(7)可计算得到散射点1在参考坐标系轴和轴的坐标位置1和1。同样地,对散射点2和散射点3回波信号进行求解,可分别重构得到在参考坐标系轴、轴的坐标位置,结果如图5所示,相应的目标散射点空间位置及旋转轨迹如图6所示。

图3 参考坐标系理论坐标

图4 对散射点1,天线A, B和C回波信号参数估计过程

图5 重构的参考坐标系坐标
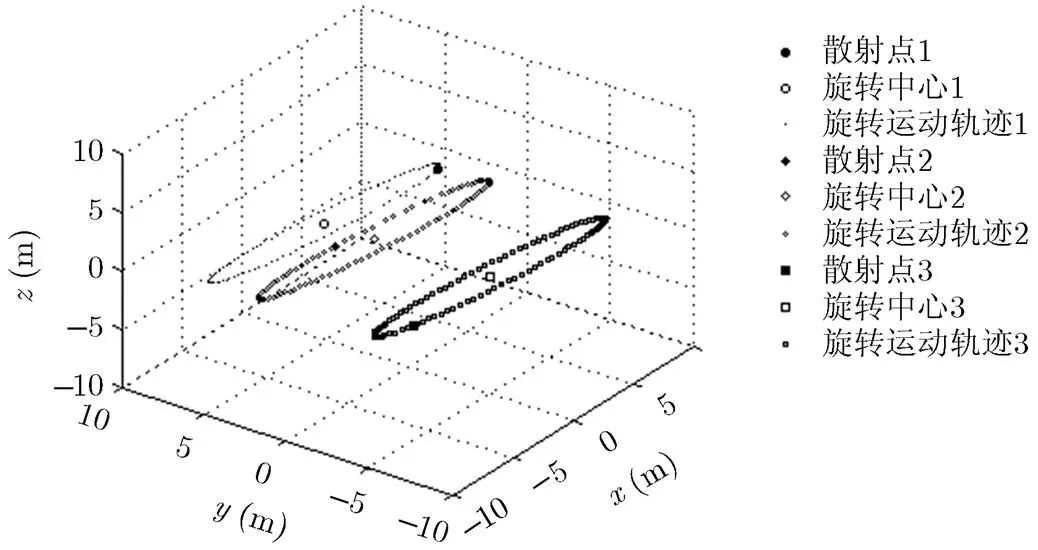
图6 重构的目标模型空间3维图像
4.1.2 有遮挡效应 在实际应用中,对于具有一定尺度的真实空间目标,由于其自旋运动时,相对视角发生变化,当目标绕轴作自旋运动时,目标的散射中心在不同视角下会产生散射点的周期性遮挡效应,部分散射点对于雷达是不可见的,轮流被遮挡,导致回波距离像包络出现局部的不完整性[17]。仿真实验中,以天线A为例,对目标存在遮挡效应时得到的距离-慢时间像,利用数学形态学中的骨架提取算法进行处理。在有遮挡效应条件下,距离-慢时间像包络出现不连续的情况,当任意选择慢时间点时,不可避免地会发生遗漏目标散射点的情况。因此,需要对多个不同慢时间点所对应的非零元素个数进行估计,选择非零元素稀疏度最大时所对应的慢时间点,在目标3维图像重构中,可有效降低由于遮挡效应引起的散射点丢失的风险。同样地,按照所提算法,对目标散射点参数进行估计,重构得到参考坐标系坐标如图7所示。
4.2 分析与讨论
在本节中,对影响所提方法成像性能的因素进行了分析和讨论,并将所提方法与文献[18]的方法进行了比较。
4.2.1 参数估计结果相对误差对重构结果的影响 由仿真实验结果可知,目标参数估计结果与理论值之间存在误差,本节针对参数估计误差对空间3维坐标重构结果的影响进行分析。以散射点1在参考坐标系轴的重构结果为例,分别假设参数,,和的估计结果相对误差分别为0.5%, 1.0%, 1.5%, 2.0%和2.5%, 50次蒙特卡罗仿真实验结果如图8所示。由仿真实验结果可知,坐标重构结果对参数,和的估计结果相对误差不敏感,参数估计结果相对误差对坐标重构结果造成的影响较小。然而,由图8(b)可知,当参数的估计结果相对误差为2.5%时,相应的坐标重构结果相对误差达到50%。因此,坐标重构结果对参数的估计结果相对误差较敏感。
4.2.2 信噪比(Signal to Noise Ratio, SNR)对参数估计结果的影响 在4.2.1节中分析了参数估计结果相对误差对重构结果的影响,而SNR是影响参数估计结果的重要因素,因此,针对SNR变化对参数估计结果的影响进行分析和讨论。仿真实验中,取SNR分别为0 dB, 5 dB, 10 dB, 15 dB和20 dB,对散射点1的天线A回波信号进行参数估计,50次蒙特卡罗仿真结果如图9所示。由图9中的仿真实验结果可知,和的估计结果对SNR的变化不敏感,当SNR为0 dB时,估计结果的相对误差仍很小;参数和的估计结果对SNR的变化较敏感。由4.2.1节中的分析可知,参数的估计结果相对误差对重构结果影响较小,因此,综合以上因素,当SNR为0 dB时,参数的估计结果相对误差为2.0%,对坐标重构结果的影响仍较小。对于参数,当SNR为5 dB时,其估计结果相对误差为0.75%,由图8(b)中的结果可知,重构结果相对误差为15%,对重构结果造成了较大影响。因此,综合上述分析结果可知,在SNR高于5 dB的条件下,基于所提方法可较准确地重构目标真实3维坐标。
4.2.3 与已有方法的比较 由于干涉方法对回波信号相位项变化的敏感性,因此,对各散射点回波信号进行区分的方法应具有较好的相位保持性。若处理后的回波信号相位项发生较大改变,那么将难以准确重构目标的真实3维坐标。在已有方法中[18],往往首先对各散射点的1维距离像进行曲线分离处理,然后对各散射点回波信号分别进行干涉处理。该类方法的优点在于具有较好的相位保持性;缺点在于在曲线分离处理中,对曲线交叉点进行处理时,不可避免地在交叉点处出现分离错误的情况,此外,对于存在遮挡效应的情况,距离-慢时间像的包络不连续,也严重影响曲线分离方法的结果[19],有待进一步深入研究。因此,与已有方法相比,在无遮挡和有遮挡效应的情况下,所提方法均能够准确重构目标真实3维坐标。

图7 重构的参考坐标系坐标

图8 参数估计结果相对误差对坐标重构结果的影响 图9 SNR对参数估计结果的影响
5 结论
针对空间微动目标宽带雷达3维成像问题,本文提出了一种基于改进的粒子群优化的干涉式3维成像方法。所提方法通过建立回波信号参数化表征模型、微多普勒相位重构、相位干涉等计算和处理,利用回波信号干涉相位差,重构空间微动目标真实坐标和3维图像。相较于已有方法,所提方法在无遮挡和有遮挡效应的条件下,均可准确重构目标空间坐标和3维图像,并具有较好的鲁棒性,为有效实现空间微动目标3维成像提供了一种思路。仿真结果验证了所提方法的有效性。
参考文献
[1] 张群, 罗迎. 雷达目标微多普勒效应[M]. 北京: 国防工业出版社, 2013: 22-23.
ZHANG Q and LUO Y. Micro-Doppler Effect of Radar Targets[M]. Beijing: National Defense Industry Press, 2013: 22-23.
[2] 王德纯. 微多普勒雷达述评[J]. 中国电子科学研究院学报, 2012, 7(6): 575-580. doi: 10.3969/j.issn.1673-5692.2012.06. 006.
WANG Dechun. An overview of micro-Doppler radar[J]., 2012, 7(6): 575-580. doi: 10.3969/j.issn. 1673-5692.2012.06.006.
[3] 张浩鹏, 魏全茂, 张威, 等. 基于序列图像的空间目标三维重建[J]. 北京航空航天大学学报, 2016, 42(2): 273-279. doi: 10.13700/j.bh.1001-5965.2015.0117.
ZHANG Haopeng, WEI Quanmao, ZHANG Wei,. Sequential image based space object 3D reconstruction[J]., 2016, 42(2): 273-279. doi: 10.13700/j.bh.1001-5965.2015. 0117.
[4] LIU Hongchao, JIU Bo, LIU Hongwei,. Super-resolution ISAR imaging based on sparse Bayesian learning[J]., 2014, 52(8): 5005-5013. doi: 10.1109/TGRS.2013.2286402.
[5] BAI Xueru, ZHOU Feng, and BAO Zheng. High-resolution three-dimensional imaging of space targets in micro-motion [J]., 2015, 8(7): 3428-3440. doi: 10.1109/JSTARS.2015.2431119.
[6] MAYHAN J T. Phase-enhanced 3D snapshot ISAR imaging and interferometric SAR[R]. ESC-TR-2007-067, Lexington: Lincoln Laboratory, 2009.
[7] 王昕, 郭宝锋, 尚朝轩. 基于二维ISAR图像序列的雷达目标三维重建方法[J]. 电子与信息学报, 2013, 35(10): 2475-2480. doi: 10.3724/SP.J.1146.2013.00140.
WANG Xin, GUO Baofeng, and SHANG Chaoxuan. 3D reconstruction of target geometry based on 2D data of inverse synthetic aperture radar images[J].&, 2013, 35(10): 2475-2480. doi: 10. 3724/SP.J.1146.2013.00140.
[8] 梁必帅, 张群, 娄昊, 等. 基于微动特征关联的空间自旋目标宽带雷达三维成像[J]. 电子与信息学报, 2013, 35(9): 2132-2140. doi: 10.3724/SP.J.1146.2012.01537.
LIANG Bishuai, ZHANG Qun, LOU Hao,. Three- dimensional broadband radar imaging of space spinning targets based on micro-motion parameter correlation[J].&, 2013, 35(9): 2132-2140. doi: 10.3724/SP.J.1146.2012.01537.
[9] 梁必帅, 张群, 娄昊, 等. 基于微动特征关联的空间非对称自旋目标雷达三维成像方法[J]. 电子与信息学报, 2014, 36(6): 1381-1388. doi: 10.3724/SP.J.1146.2013.01147.
LIANG Bishuai, ZHANG Qun, LOU Hao,. A method of three dimensional imaging based on micro-motion feature association for spatial asymmetrical spinning targets[J].&, 2014, 36(6): 1381-1388. doi: 10.3724/SP.J.1146.2013.01147.
[10] WANG Genyuan, XIA Xianggen, and CHEN V C. Three- dimensional ISAR imaging of maneuvering targets using three receivers[J]., 2001, 10(3): 436-447. doi: 10.1109/83.908519.
[11] ZHAO Lizhi, GAO Meiguo, MARTORELLA M,. Bistatic three-dimensional interferometric ISAR image reconstruction[J]., 2015, 51(2): 951-961. doi: 10.1109/TAES. 2014.130702.
[12] LIU C L, HE F, GAO X Z,. Squint-mode InISAR imaging based on nonlinear least square and coordinates transform[J]., 2011, 54(12): 3332-3340. doi: 10.1007/s11431-011-4515-9.
[13] 刘波, 潘舟浩, 李道京, 等. 基于毫米波InISAR成像的运动目标探测与定位[J]. 红外与毫米波学报, 2012, 31(3): 258-264. doi: 10.3724/SP.J.1010.2012.00258.
LIU Bo, PAN Zhouhao, LI Daojing,. Moving target detection and location based on millimeter-wave InISAR imaging[J]., 2012, 31(3): 258-264. doi: 10.3724/SP.J.1010.2012.00258.
[14] CHEN V C, LI F Y, HO S S,. Micro-Doppler effect in radar: Phenomenon, model and simulation study[J]., 2006, 42(1): 2-21. doi: 10.1109/TAES.2006.1603402.
[15] 曹文杰, 张磊, 杜兰, 等. 基于瞬时频率估计的进动锥体目标微多普勒频率提取方法[J]. 电子与信息学报, 2015, 37(5): 1091-1096. doi: 10.11999/JEIT140985.
CAO Wenjie, ZHANG Lei, DU Lan,. Micro-Doppler frequency extraction for cone-shaped target with precession based on instantaneous frequency estimation[J].&, 2015, 37(5): 1091-1096. doi: 10.11999/JEIT140985.
[16] ZHANG Q, YEO T S, TAN H S,. Imaging of a moving target with rotating parts based on the Hough transform[J]., 2008, 46(1): 291-299. doi: 10.1109/TGRS.2007.907105.
[17] HONG Ling, DAI Fengzhou, and LIU Hongwei. Sparse narrowband radar imaging for spinning targets with occlusion effect[C]. IEEE International Radar Conference, Arlington, USA, 2015: 942-946. doi: 10.1109/RADAR.2015. 7131130.
[18] SUN Yuxue, MA Changzheng, LUO Ying,. An interferometric-processing based three-dimensional imaging method for space rotating targets[C]. IET International Radar Conference, Guangzhou, China, 2016: 398-402.
[19] 赵盟盟, 张群, 陈怡君, 等. 一种用于空间群目标分辨的滑动窗轨迹跟踪算法[J]. 宇航学报, 2015, 36(10): 1187-1194. doi: 10.3873/j.issn.1000-1328.2015.10.013.
ZHAO Mengmeng, ZHANG Qun, CHEN Yijun,. A sliding window tracking algorithm for distinguishing space group targets[J]., 2015, 36(10): 1187-1194. doi: 10.3873/j.issn.1000-1328.2015.10.013.
陈春晖: 女,1986年生,工程师,研究方向为雷达运动目标成像与识别.
张 群: 男,1964年生,教授,研究方向为雷达成像与目标识别.
罗 迎: 男,1984年生,副教授,研究方向为雷达成像与目标识别.
孙玉雪: 女,1992年生,研究生,研究方向为雷达成像与目标识别.
Interferometric Three Dimensional Imaging Method for Space Micro-motion Target Based on Wideband Radar
CHEN Chunhui ZHANG Qun LUO Ying SUN Yuxue
(,,’710077,) (,’710077,)
Three dimensional imaging of space micro-motion target has significant advantages on target information awareness, which is crucial to effectively realize space target imaging, classification and recognition. In this paper, through the L type antenna array imaging system, an interferometric three dimensional imaging method for space micro-motion target is proposed based on the improved Particle Swarm Optimization (PSO) algorithm. Firstly, the Doppler effect in the received signal is analyzed, and the corresponding parametric model is established. Then, the Doppler phase term of the received signal is reconstructed by using the proposed optimization method. Through interferometric processing and analyzing the quantitative relationship between interferometric phase difference and real coordinate, the three dimensional coordinates and image can be obtained. Compared with the existing methods, the proposed method can reconstruct the real coordinates and three dimensional image of micro-motion target with and without occlusion effect. It also has good robustness. Finally, simulations validate the effectiveness of the proposed method.
Radar signal processing; Three dimensional imaging; Interferometric imaging; Micro-motion target; Micro-Doppler effect
TN957.52
A
1009-5896(2016)12-3144-08
10.11999/JEIT161025
2016-10-08;改回日期:2016-11-17;
2016-12-14
张群 afeuzq@163.com
国家自然科学基金(61571457)
The National Natural Science Foundation of China (61571457)