分段供电切换传感器的在线故障诊断方法*
2017-01-07徐兴华马伟明崔小鹏张明元李文禄
徐兴华,马伟明,崔小鹏,张明元,李文禄
(海军工程大学 舰船综合电力技术国防科技重点实验室, 湖北 武汉 430033)
分段供电切换传感器的在线故障诊断方法*
徐兴华,马伟明,崔小鹏,张明元,李文禄
(海军工程大学 舰船综合电力技术国防科技重点实验室, 湖北 武汉 430033)
分段供电切换传感器是多段直线电机控制系统的重要部件。针对其故障检测与定位的问题,提出一种切换传感器故障的在线诊断方法。对采集的传感器信号数据进行压缩,以提高计算的效率;研究切换传感器信号根据次级运动的变化规律,定义标准信号集合;给出计算传感信号差异度的方法,作为分析信号相似程度的量化指标;将问题表示为基于有向图的搜索问题,并根据问题的特点缩小搜索的范围;由此提出搜索算法,可以根据测量的传感信号时序估计传感系统的状态变迁过程;给出故障定位流程,利用算法估计的结果,根据系统标准信号集合进行故障定位。为了说明算法与预期结果的一致性,给出3个命题并进行证明;通过实验验证了故障诊断方法的有效性。
分段供电;直线电机;切换传感器;故障诊断;有向图
采用分段供电的直线电机由于具有能量效率高、适装性好等优点,适合于大能量、长距离的直线运动,多应用于磁悬浮列车[1-3]、磁悬浮发射[4]、垂直运输[5-6]和电磁发射[7-9]等领域。
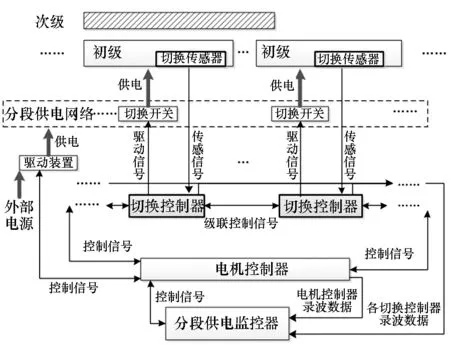
分段供电的控制经常采用“传感器+控制器+切换开关”的模式。例如:文献[3]采用光电传感器检测初级的运动位置,使用固态继电器作为分段供电的切换开关。文献[7]采用霍尔传感器检测位置,使用晶闸管作为分段供电的切换开关。图1是一种典型的分段供电控制系统。
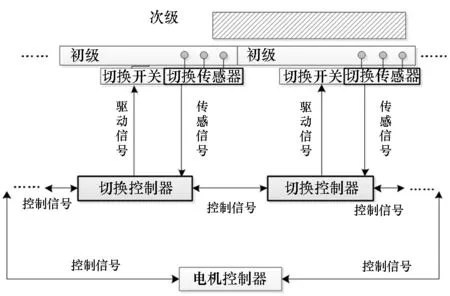
图1 典型的分段供电切换控制系统结构Fig.1 Typical structure of segment-powered switch control system
图1中,切换传感器安装于每段的特定位置,采用多传感器并列的冗余设计。以次级作为切换传感器感应的对象,当某一路传感器感应到次级时,输出高电平信号,当未感应到次级时,输出低电平信号,切换控制器根据切换传感器以及相邻切换控制器之间的控制信号,产生控制切换开关通断的控制指令。
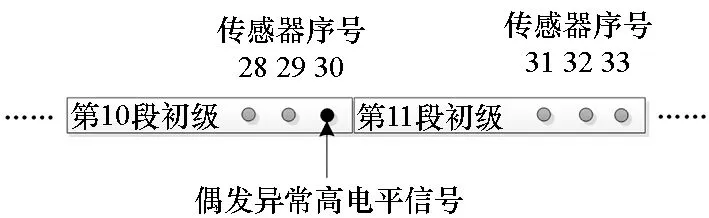
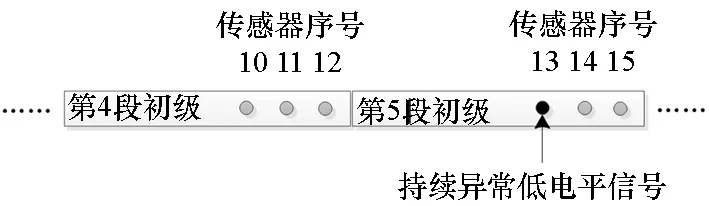
切换传感器的常见故障情况包括:①偶发异常高电平,即不应该高电平的时候发出高电平信号;②偶发异常低电平,即未正常发出高电平信号;③持续异常高电平,即运行全过程都发出高电平信号;④持续异常低电平,即运行全过程都发出低电平信号。前两种故障一般是由干扰或硬件性能下降导致,后两种一般是由硬件完全失效导致。
由于切换传感器的信号用于控制切换开关的导通或关断,一旦出现上述异常,不论是干扰还是硬件失效,都有可能导致切换开关误动作,从而影响直线电机正常工作,还有可能损坏设备。但此类故障较为隐蔽,不一定每次都造成电压电流明显的异常波动,往往难以及时发现。因此,在实际使用中,需要在线对系统运行的录波数据进行综合分析,以便及时维修。
目前关于分段供电故障诊断的研究常利用对各种故障模式下电流和电磁力等指标的变化特征进行分析来发现故障。文献[10]通过分析典型故障情况的等效电路,研究了直线电机故障情况下的运行特点;文献[11]通过研究正常与故障工况下的电磁力,给出了直线电机故障的判据;文献[12]通过分析分段直线感应电机在d-q坐标系下的等效数学模型及控制策略,给出了分段供电切换故障的诊断方法。然而这些研究未直接对切换传感信号的特征进行分析,因此无法对切换传感器的故障进行精确诊断与定位。
对传感器故障诊断有多种途径[13],主要包括硬件冗余[14]、分析冗余和时序冗余等,基于的方法和理论也多种多样,如基于卡尔曼滤波方程组[15]、基于小波包变换和支持向量机[16]、基于动态不确定度[17]等。多数方法是对单个传感器输出信号波形进行分析从而得到故障的时频特征,但分段供电系统中单个切换传感器所产生的是方波信号,没必要使用复杂的信号处理算法对其进行处理。
文献[18-19]利用正常的霍尔传感器位置信号通过延时均分的方法,在无刷直流电机转子位置检测传感器进行故障诊断,但其诊断对象为检测旋转运动的少量传感器,难以适用于检测瞬态直线运动的大量传感器。
文献[20]基于Hilbert-Huang变换和自适应滤波的方法,提出了一种对磁悬浮列车的悬浮传感器进行故障检测的方法,是一种从微观角度对每个传感器进行分析的方法,但由于本文研究的系统中切换传感器输出电平信号,因此无法从微观角度进行分析,只能从宏观角度对传感器信号的逻辑组合状态进行分析。
1 前提假设
本文在下列前提假设成立的情况下进行研究:
1)次级的一次运动过程中不改变运动方向,如果改变了运动方向,应视为不同的运动过程;
2)次级运动的起始位置已知;
3)正常情况下,切换传感器在与次级耦合时一定发出高电平信号,未耦合时一定发出低电平信号。
2 传感信号的处理
2.1 数据压缩
在次级的一次运动过程中,各切换控制器通过高频采样将与其连接的传感器的感应信号按时间顺序记录下来,在线传输给故障诊断设备。诊断时须将各传感器的信号时序放在统一的时间基线下进行分析。
由于传感器使用的是电平信号,在高采样频率下,往往同一种状态就有几百至上千个采样点。假设同一种状态的所有采样数据合并为一个值,则可以大大提高计算效率,简化诊断逻辑。按此思路对采集到的数据进行压缩处理,在保持其信息完整的前提下,使数据量最小。
假设系统中一共有M个传感器,按照初级起始端到初级末端的顺序依次排列,编号为1至M。所有传感器在次级运动过程的数据可以用一个矩阵S表示:
=[s1,s2,…,sT]
(1)
式中:T表示一次运动过程中总的采样周期数;sij表示第i个传感器在第j个采样周期的信号,取值为0或1(0表示无感应信号,1表示有感应信号);sj表示第j个采样周期所有传感器的信号。
从第2个至第T个采样周期,每个信号当前值与前一个采样周期的值相减,如得到0则表示信号在此时刻不变化,用矩阵E表示:
=[e2,e3,…,eT]
(2)
矩阵E表示的是各传感器信号的差分关系,如果出现全为0的列向量,则表示切换信号均未发生跳变。该矩阵通常是一个稀疏矩阵,有大量列为零向量,依次寻找非零向量对应的采样时刻(采样周期序号)设为t2,t3, …,tK,再加入第1个采样周期,设t1=1。
由此得到适合于逻辑判断的矩阵Q:
Q=[st1,st2,…,stK]=[q1,…,qK]
(3)
矩阵Q已将数据充分压缩,它的每一列均代表传感器信号在一段时间内保持某一种组合逻辑,共有K列。这些组合逻辑在下文中也称为“系统状态”。
2.2 标准信号集合
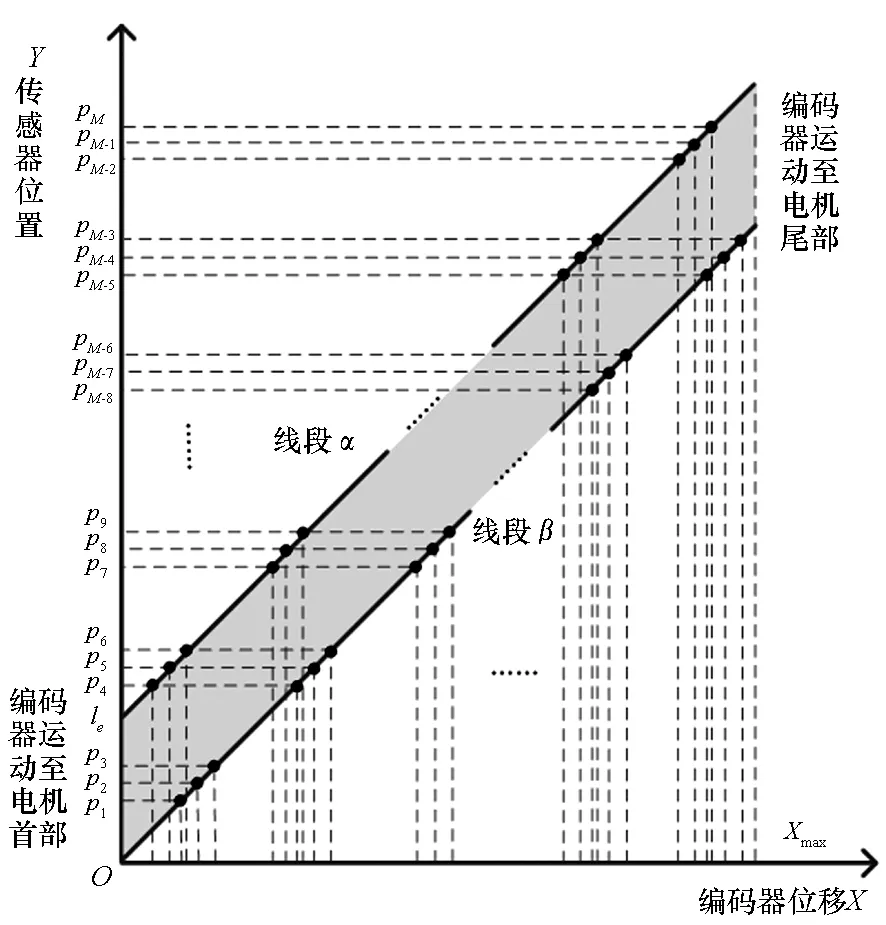
图2 传感器信号变化与次级位移的关系图Fig.2 Relationship between the sensor signal changing and the secondary movement
在由M个传感器组成的系统中,由于传感器按一定的空间位置排列,在次级的运动过程中,在不出现故障的情况下,传感信号固定地按一定的时序变化。在二维笛卡尔坐标系下表示传感器产生高电平信号的条件如图2所示,其中X轴表示次级的运动位移,Y轴表示传感器的分布位置,次级位于初级起点时,次级尾端位置为坐标原点O。
图2中le为次级产生感应信号部分的长度,线段α表示次级首端与传感器耦合的关系,其表达式为:
y=x+le,x∈[0,xmax]
(4)
线段β表示次级尾端与传感器耦合的关系,其表达式为:
y=x,x∈[0,xmax]
(5)
线段α,β包夹的面积就是使传感器产生感应信号的情况,如位置关系在区域外,传感器不产生感应信号。
p1,p2,…,pM为各传感器沿次级运动方向的安装位置,M表示传感器的总数。在次级尾端位置x从0变化至xmax的过程中,系统状态不断变化,设第j种系统状态为θj=(F1j,F2j,…,FMj),Fij表示第j种系统状态中第i号传感器的信号,传感器与次级耦合时其信号取值为1,否则取值为0,可用分段函数表示:
(6)
θj在本文中称为第j种系统状态的“标准信号”,标准信号反映了次级在某个位置时各传感器应出现的正常信号。
设Ntail是安装位置处于[0,xmax-le]区间的传感器数量,即可能由次级尾端位置变化而改变信号的传感器数量;Nhead是安装位置处于[le,xmax]区间的传感器数量,即可能由次级首端位置变化而改变信号的传感器数量。则次级运动全过程中可能出现系统状态的种类数是N=Ntail+Nhead。
将系统状态枚举为1,2,…,N,所对应的标准信号集合表示为A={θ1,θ2,…,θN},θi称为系统状态i的标准信号,θi=(F1i,F2i,…,FMi),1≤i≤N。
2.3 差异度计算
次级运动的全过程,如果未发生任何故障,所有传感器的信号会严格按一定的时序变化,任何时候系统的实测信号都是标准信号。如果实测信号与标准信号有差异,则可认为是传感器出现了异常。为了描述实测信号和标准信号的差异,下面给出一种定量的计算方法。
定义维数是M、元素全为1的向量为ε=(1,1,…,1)T,设有维数是M、元素取值为{0,1}的任意向量p,q;“·”表示内积。
定义函数ξ1(p,q)为:
(7)
函数ξ1(p,q)实际上是为了识别p中某个维数的元素值为1但q中相应维数的元素值为0的情况,函数值是发现此情况的维数占总维数的比例。
定义函数ξ2(p,q)为:
(8)
函数ξ2(p,q)实际上是为了识别p中某个维数的元素值为0但q中相应维数的元素值为1的情况,函数值是发现此情况的维数占总维数的比例。
实测信号和标准信号的差异度可以用函数ξ(p,q)计算:

(9)
由此得到矩阵Ω′为:
(10)
矩阵Ω′表示系统状态在每一步跳变后,实测信号与各种标准信号的差异度。
定义对角矩阵H:
(11)
对角线的元素是系统状态q1,q2,…,qK的持续时间。
在矩阵Ω′的基础上,加入了每种状态持续时间作为权重因子,对测量信号与各种标准信号的差异度进行加权,得到矩阵Ω:
(12)
其中任意一个元素ωij,1≤i≤N,有:
(13)
矩阵Ω能更好地反映系统变化的总体趋势,有利于提高判断的准确性。
3 最小差异优先搜索
3.1 搜索的有关定义
将传感器系统状态变迁的所有可能性表示为图3所示的有向图。其中的每一行表示系统的一种状态,从左到右的各列表示变化的先后次序,每个结点(i,j)表示在系统第j次变化中处于第i种状态。设用于描述系统的有向图为G。
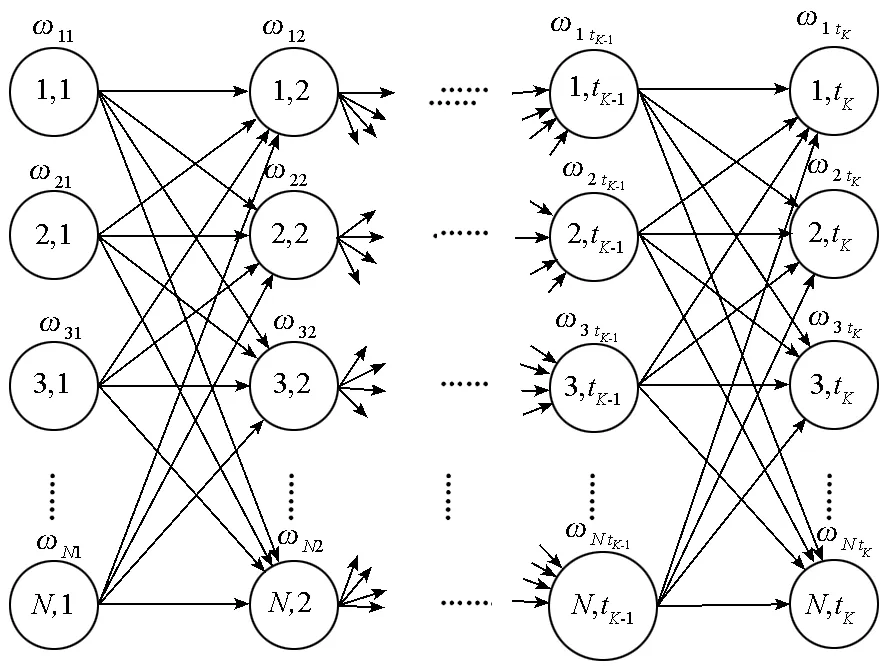
图3 系统状态变迁有向图Fig.3 Directed graph of the system state transition
为了进行传感器故障诊断,提出了一种在有向图中寻找最相似系统变化过程的求解方法,称为“最小差异优先搜索”,下面先给出有关定义。

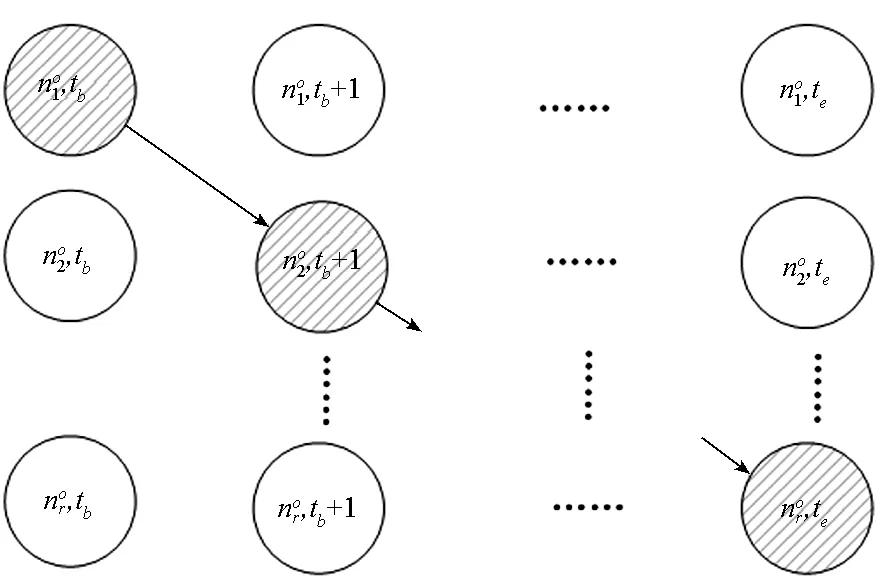
图4 系统某次变化过程示意图Fig.4 Process of the system state transition



为寻找最佳估计,需要对时序向量的估计效果进行量化。为此,定义“差异度”如下:

在搜索算法中,需要在有向图中分析从起点到其他某个结点的路径,寻找时序估计向量的差异度最小的情况,为此给出以下定义:
定义4 在G中最小差异时序估计向量是指,从给定起始结点到给定终止结点的时序估计向量中,基于矩阵Ω的差异度最小的一个向量seqr′=(n1′,n2′,…,nr′)T满足diff(seqr′)=min[diff(seqr)]。 其中seqr中起点和终点是给定值,且对任意ni′(1≤i≤r)都有1≤ni′≤N。
由于起始状态已知,因此次级一次完整运动过程对应于G中的路径,起始结点为固定的(N0,1),终止结点为(x,K),其中K是系统状态变化总次数,x是任意的状态枚举值,且1≤x≤N。 在传感器全部正常工作的情况下,总能找到唯一的终止结点(x,K)和唯一的1组时序估计向量,使diff(seqK)=0,即次级运动的全过程中,一定有一个状态变化时序,每一项的观测信号与标准信号差异度都为0。 但是当某一个或多个传感器工作异常时,某些时刻的观测信号可能会偏离标准信号,往往会出现diff(seqK)>0。
如果能找到使diff(seqK)取最小值的时序估计向量,则可以认为其是偏差最小的估计。 为此,定义“最佳时序估计向量”如下:

本文给出一种搜索方法,能够根据有向图G和矩阵Ω给出从起始结点(N0,1)到终止结点为图G最右侧的任意点(x,K)上的最佳时序估计向量,可认为是最接近系统实际状态变化过程的时序向量。
3.2 搜索的简化
如果依次遍历每条可能的路径,当问题规模较大时,所需要的计算时间开销和存储器开销将过大,难以满足实时诊断的要求。
下面通过分析问题的特点,对搜索过程增加一定的约束,从而预先去掉大量无效的搜索分支,以实现搜索问题的简化。
由于本文假设次级一次运动过程中方向不变,要么是前进方向,要么是后退方向,因此系统状态的变迁可由图5(前进过程)或图6(后退过程)表示,这两种过程是对称的。 如果提出在其中一个方向的搜索方法,便可类推至另一方向。
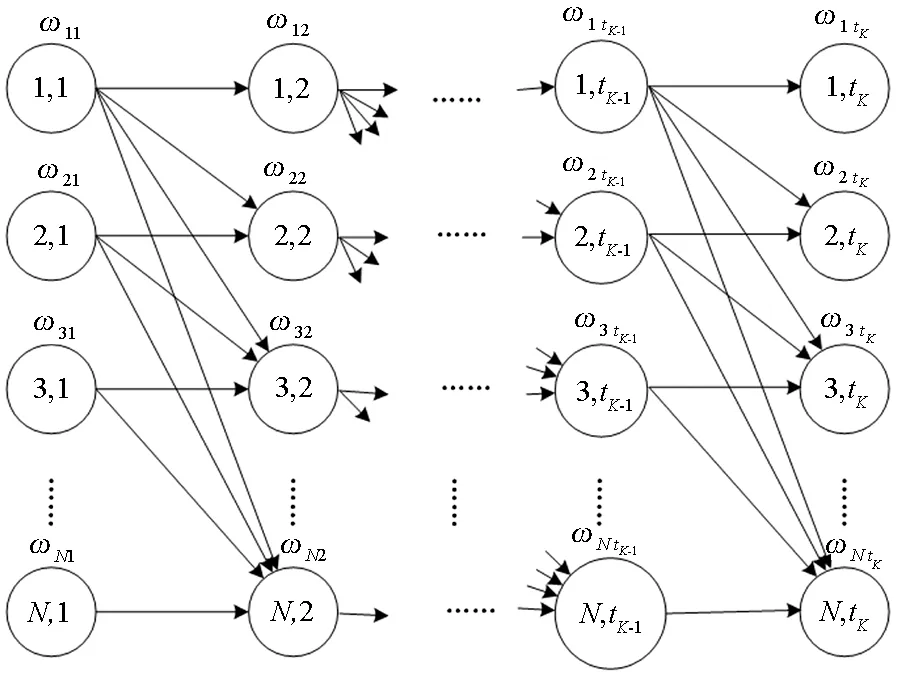
图5 次级前进过程系统状态变迁有向图Fig.5 Directed graph of system state transition in the forward process of the secondary
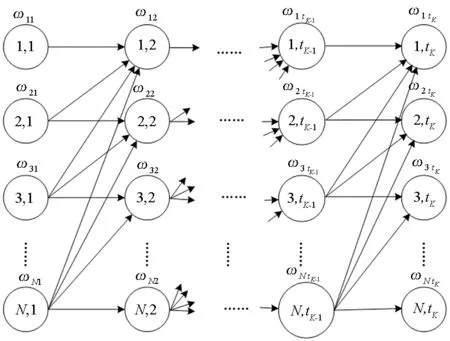
图6 次级后退过程系统状态变迁有向图Fig.6 Directed graph of system state transition in the fallback process of the secondary
下面以前进的运动方向(图5)为例研究最佳时序的搜索方法。
对于前进方向的状态时序,可以分为3种,如图7所示,图7(a)是状态未变化的情况;图7(b)是状态变为后续相邻状态,表示次级运行产生的传感器信号变化;图7(c)是状态变为后续不相邻状态,一般为多个传感器在控制器同一采样周期内发生变化,造成状态连续跳变。 时序向量中向后递进变化的方式必是此3种情况之一,除此之外,再无其他变化方式。
由此可缩小搜索范围,如图8所示。路径的起点是图最左侧的结点(N0,1),终点是图最右侧的一列上的某一个结点,即(N0,K),(N0+1,K),…,(N,K)中的某一个结点。
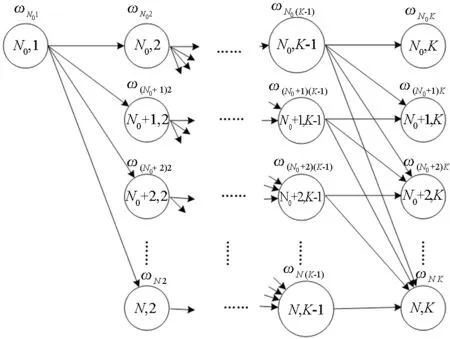
图8 化简后需搜索的有向图Fig.8 Simplified directed graph
3.3 搜索算法
针对化简后的有向图,提出一种搜索算法,可求解最佳时序估计向量,具体内容如下所示。
以结点(N0,1)为起点,层层递进,求起点到每个结点代价最小(差异度最小)的路径,从起点开始遍历整条路径,终点为图右侧第K列上的结点,即可得到最佳时序估计向量。
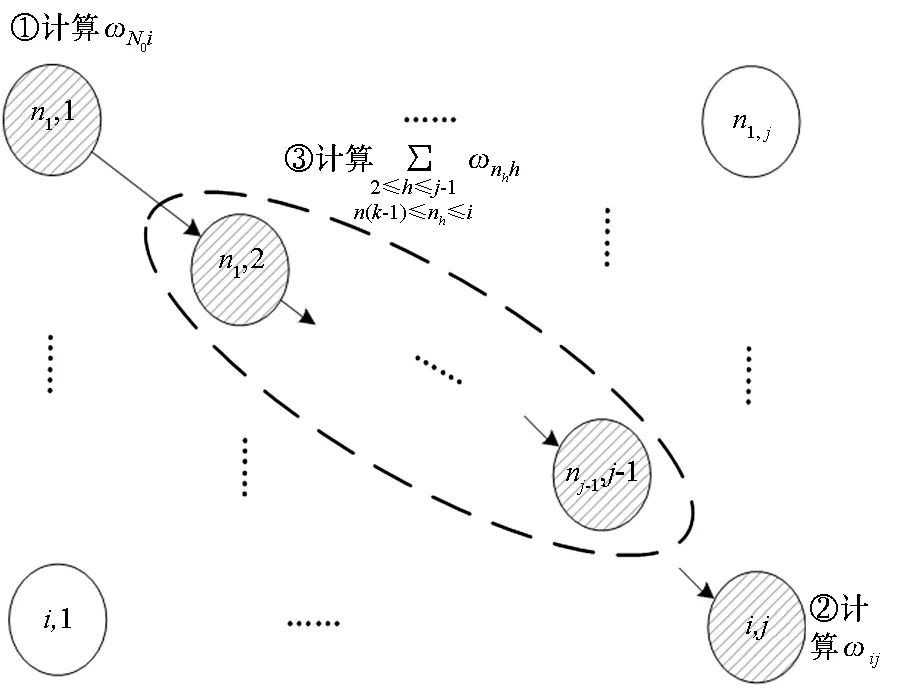
对于G中从起点到其他各结点的最小差异时序估计向量,如果能记录其基于矩阵Ω的差异度,便可逐步递推至全图范围,直至找到最佳时序估计向量的差异度,因此定义(N-N0)×K的矩阵Diff0:
(14)
对于矩阵Diff0中一个元素dij,其含义是从起点(N0,1)到达结点(i,j)过程中,最小差异时序估计向量seqj′=(n1′,n2′,…,nj-1′,nj′)T基于矩阵Ω的差异度diff(seqj′)。i,j的取值范围是N0≤i≤N,1≤j≤K。
Diff0的第1列对搜索没有实际意义,为简化问题,将其去掉。由此定义(N-N0)×(K-1)的矩阵Diff:
(15)
为记录矩阵Diff每个元素对应的最小差异时序估计向量,定义(N-N0)×(K-1)的矩阵Path用于记录搜索过程的中间结果:
(16)
矩阵Path中每个元素pij的定义是,如果从起点(N0,1)到达结点(N0+i,j)的最小差异时序估计向量是seqj′=(n1′,n2′,…,nj-1′,nj′)T,那么pij=nj-1′。pij也可以理解为,在终点(N0+i,j)向前回溯到上一个结点的记录。i,j的取值范围是1≤i≤(N-N0),2≤j≤K。
根据矩阵Path中的记录,可以逐步回溯最小差异路径上经过的所有结点,由此可获得最小差异路径,即可得到最佳时序估计向量。
此问题本质上是图的优化问题,较类似于常见的最短路径规划问题,但有两个显著区别:①最短路径问题的权值是在结点之间的边上的,而此问题的权值在结点本身;②最短路径问题对结点的访问次序没有约束,而此问题中对结点的访问次序有一定的规则约束。
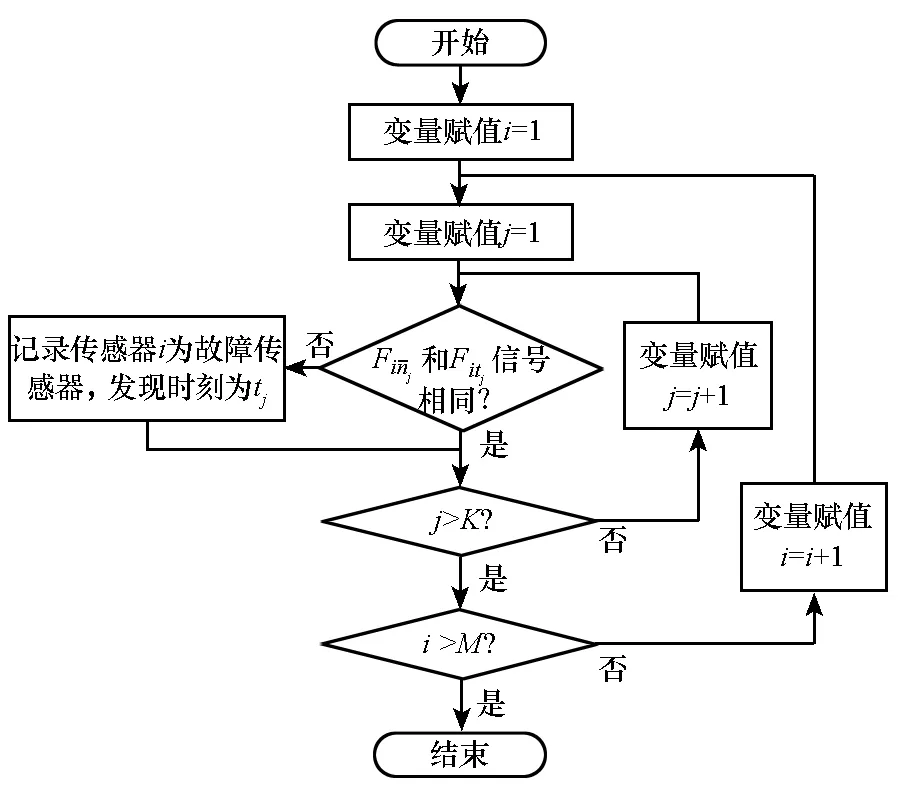
由于无法直接运用已有的搜索算法求解,因此提出一种根据矩阵Ω计算矩阵Diff和矩阵Path的算法,其步骤如下:
步骤1:填写矩阵Diff的第1列。计算公式为
di2=ωN01+ωi2
步骤2:填写路径矩阵Path第1列。计算公式为
pi2=N0
步骤3:令j=2。
步骤4:填写路径矩阵Path第j列。计算公式为
pi(j+1)=x
步骤5:填写最小差异矩阵Diff第j列。计算公式为
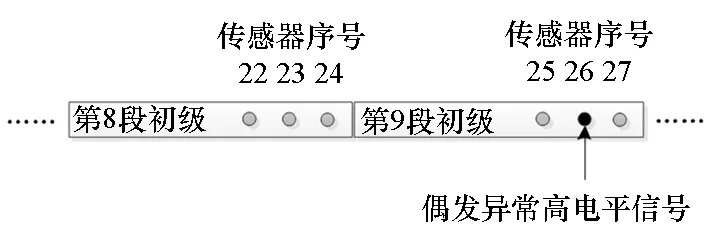
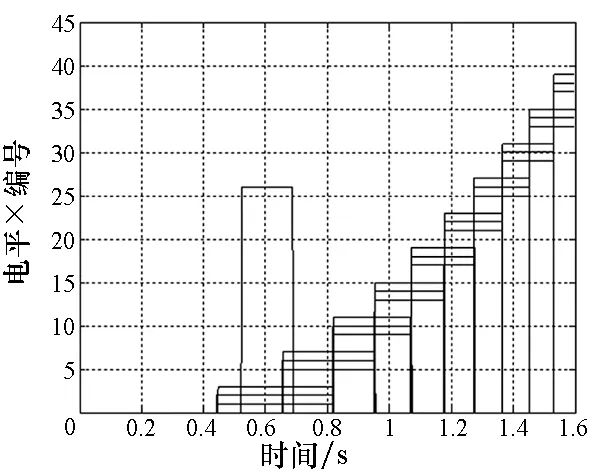
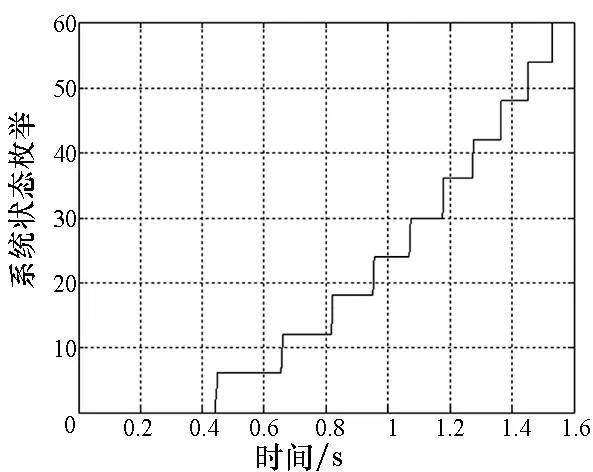
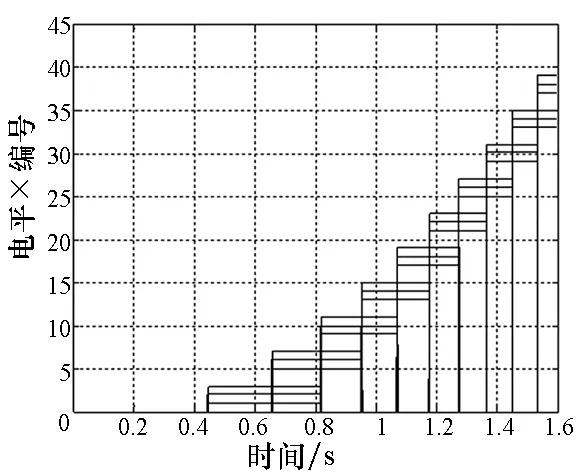
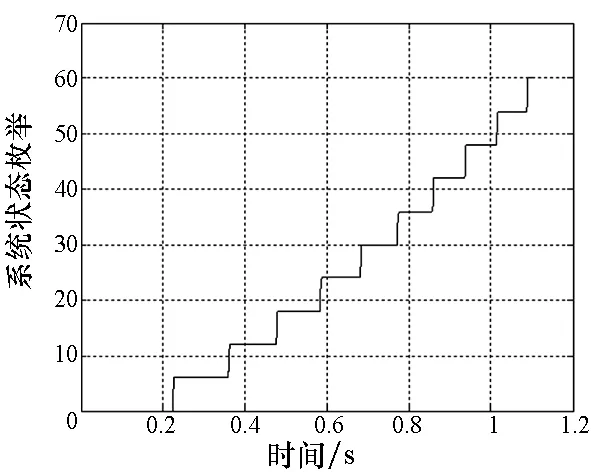
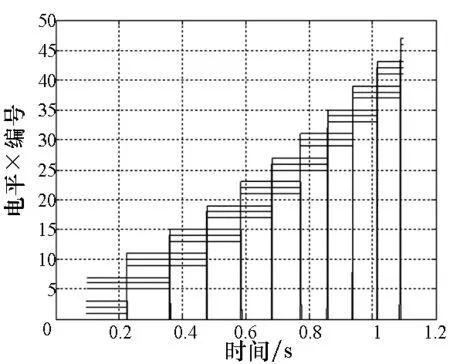
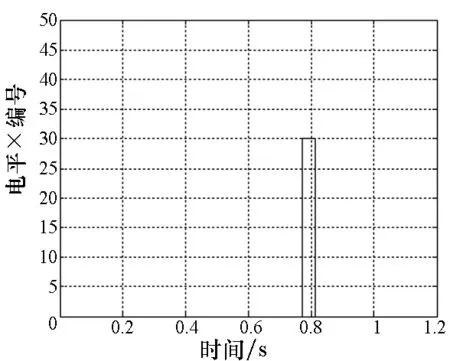
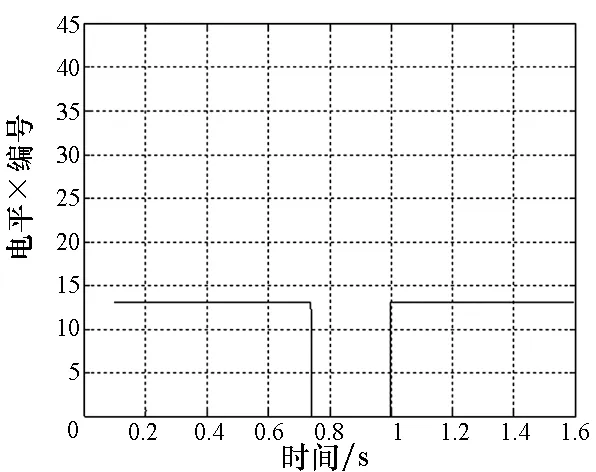
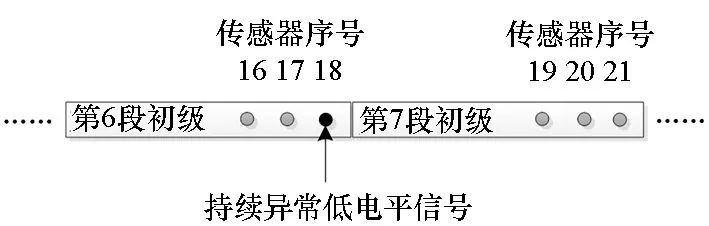
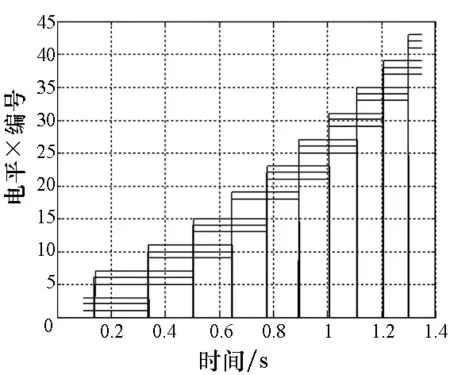
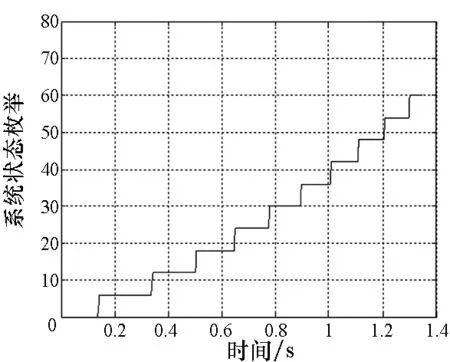
步骤6:如果j 步骤7:如果K=1,则跳转到步骤12。 步骤9:令g=K-1。 步骤11:如果g>1,则g自减1,跳转到步骤10。 本算法可以由实测传感信号得到传感系统的最佳时序估计向量。 3.4 故障的定位 图9 故障定位流程Fig.9 Process of fault locating 下面证明搜索目的与算法计算结果的一致性,可分为3个命题依次进行证明。 命题1 由算法得到的矩阵Diff中任何一个元素dij(N0≤i≤N,2≤j≤K),设图10从结点(N0,1)到结点(i,j)的任一时序向量seqj=(n1,n2,n3,…,nj-1,nj)T(其中n1=N0,nj=i),若其中任意nh(2≤h≤j-1)都满足nh-1≤nh≤nh+1,则有: (17) 其中dij是由路径头部结点、尾部结点和头尾之间的结点三部分计算得到,如图10所示。 图10 dij的组成示意图Fig.10 Constitution of dij 下面使用归纳法对子命题1进行证明,分为3个步骤: 步骤①:当j=2时,对于元素di2,根据算法的步骤1,得到di2=ωN01+ωi2,满足命题要求。 步骤②:当j=3时,对于元素di3,根据算法的步骤4、步骤5得到: (18) 由于求和公式中h只取2,求和公式可退化为只有1项: (19) 结合式(18)和式(19)可得: (20) 满足命题要求。 (21) 由于ωij可以看作是只有一个元素的序列求和再取最小值,并且根据已知条件nj=i,因此有: (22) (23) 因此,当3≤j≤K-1时,命题1如果对于j成立,则对于j+1也成立,步骤③证毕。 结论:归纳步骤①~③可以得到,对于任何2≤j≤K,都有命题1中的式(17)成立,因此命题1得证。 命题2 对于任意时序估计向量seqK=(n1,n2,…,nK)T,N0和K是固定量,令n1=N0,则对任意j∈{2,3,…,K},满足nj-1≤nj≤N的充要条件是:对于任意j∈{2,3,…,K},满足nj-1≤nj≤nK,N0≤nK≤N。 在命题1成立的基础上,根据反证法可证明命题2成立。 证明两个条件等价分为2个步骤:首先证明充分性,即从后面的条件(条件2)成立可推出前面的条件(条件1)成立;再证明必要性,即从条件1成立可推出条件2成立。 步骤①:证明充分性。 由条件2成立可知对于任意j∈{2,3,…,K},有nj-1≤nj≤nK,N0≤nK≤N,从而有nj-1≤nj≤nK≤N,即nj-1≤nj≤N,即条件2成立可推出条件1成立。 步骤②:证明必要性。 2)根据条件显然有nK≤N。 又由于N0=n1≤n2≤…≤nK,因此N0≤nK≤N。 根据1)和2),必要性得证。 结论:综合步骤①和②可知,命题2成立。 在命题1、命题2成立的基础上,根据归纳法可证明命题3成立,过程如下: 当K=1时,易知命题3成立。 下面分3种情况对K>1的情况进行证明,因此分为3个步骤: (24) 再将命题1的结论代入式(24),得: (25) 根据命题1,有: (26) 由式(25)和式(26),得到: (27) 即: (28) 即当K=2时命题3成立。 (29) (30) 根据算法中的步骤5,有: (31) 根据式(26)和式(31),得到: (32) 根据命题1,有: (33) 根据命题2,上式可化为: (34) 综合式(32)和式(34),可以得到: (35) 即: (36) 即当K=3时命题3成立。 步骤③:当K>3时,采用反证法。 假设命题3不成立,即: (37) 不妨设有某一组向量seqK′=(N0,n2′,n3′,…,nK′)T满足: (38) 根据命题1的结论,上式可转化为: (39) 根据算法中的步骤8,可知: (40) 对于任意1≤j (41) 根据算法中的步骤5,有: (42) 将式(32)代入式(42),得到: (43) 结合式(40)和式(43),得到: (44) 由于向量seqK′=(N0,n2′,n3′,…,nK′)T中,对于任意j∈{2,3,…,K},满足nj-1≤nj≤N,因此根据命题1,有: (45) 结合式(43)、式(44)和式(45)得: (46) 又由算法的步骤8可知: (47) 结论:归纳步骤①~③可知,命题3成立。 利用样机对故障诊断算法进行实验验证,方案如图11所示。针对几种典型的异常工况,分别利用本文的方法对实际数据进行处理。 图11 切换传感器故障诊断系统方案Fig.11 Fault diagnosis system for switch control sensor 选取切换传感器偶发异常高电平、偶发异常低电平、持续异常高电平、持续异常低电平这4类故障发生时的典型数据,故障分别如图12~15中的子图(a)所示;传感器信号波形分别如图12~15中的子图(b)所示,横坐标表示时间,单位是秒,纵坐标表示传感器电平×传感器编号,其中传感器电平取值为0或1(0代表低电平,1代表高电平),传感器编号为从1开始递增的自然数。 (a) 传感器位置及故障模式(a) Sensor position and fault mode (b) 实际传感器信号(b) Actual sensor signal (c) 最佳时序估计(c) The best sequence estimation (d) 信号还原的结果(d) Signal reduction result (e) 故障检测结果(e) Fault diagnosis result图12 传感器偶发异常高电平信号的检测Fig.12 Detection for the accidentally abnormal high level signal of the sensor (a) 传感器位置及故障模式(a) Sensor position and fault mode (b) 实际传感器信号(b) Actual sensor signal (c) 最佳时序估计(c) The best sequence estimation (d) 信号还原的结果(d) Signal reduction result (e) 故障检测结果(e) Fault diagnosis result图13 传感器偶发异常低电平信号的检测Fig.13 Detection for the accidentally abnormal low level signal of the sensor (a) 传感器位置及故障模式(a) Sensor position and fault mode (b) 实际传感器信号(b) Actual sensor signal (c) 最佳时序估计(c) The best sequence estimation (d) 信号还原的结果(d) Signal reduction result (e) 故障检测结果(e) Fault diagnosis result图14 传感器持续异常高电平信号的检测Fig.14 Detection for the continuously abnormal high level signal of the sensor (a) 传感器位置及故障模式(a) Sensor position and fault mode (b) 实际传感器信号(b) Actual sensor signal (c) 最佳时序估计(c) The best sequence estimation (d) 信号还原的结果(d) Signal reduction result (e) 故障检测结果(e) Fault diagnosis result图15 传感器持续异常低电平信号的检测Fig.15 Detection for the continuously abnormal low level signal of the sensor 图12表示了次级的一次运动中,在0.52~0.69s之间第26号传感器(图12(a))产生偶发异常高电平信号(图12(b)),通过本文的算法可计算得到最佳时序估计(图12(c))。通过标准信号集合,将最佳时序估计还原为无故障条件下应该出现的信号(图12(d)),实测信号与标准信号进行比对,可得故障诊断的结果(图12(e))。 图13表示了次级的一次运动中,在0.77~0.81s之间第30号传感器(图13(a))产生偶发异常低电平信号(图13(b)),通过本文的算法可计算得到最佳时序估计(图13(c))。通过标准信号集合,将最佳时序估计还原为无故障条件下应该出现的信号(图13(d)),实测信号与标准信号进行比对,可得故障诊断的结果(图13(e))。 图14表示了次级的一次运动中,在全过程0~1.6s之间第13号传感器(图14(a))产生持续异常高电平信号(图14(b)),通过本文的算法可计算得到最佳时序估计(图14(c))。通过标准信号集合,将最佳时序估计还原为无故障条件下应该出现的信号(图14(d)),实测信号与标准信号进行比对,可得故障诊断的结果(图14(e))。其中0.73~0.99s之间未检测到异常,这是由于此段时间内第13号传感器的高电平也符合正确的时序逻辑,无法区分是异常还是正常。 图15表示了次级的一次运动中,在全过程0~1.4s之间第18号传感器(图15(a))产生持续异常低电平信号(图15(b)),通过本文的算法可计算得到最佳时序估计(图15(c))。通过标准信号集合,将最佳时序估计还原为无故障条件下应该出现的信号(图15(d)),实测信号与标准信号进行比对,可得故障诊断的结果(图15(e))。其中只有0.63~0.90s之间检测到异常,其余时间未检测到异常,这是由于其余时间内第18号传感器的低电平也符合正确的时序逻辑,无法区分是异常还是正常。 因此,对于上述4类传感器异常,本文的方法都能够准确定位故障。但由于本文的方法是基于信号时序逻辑进行判断的,因此对于故障产生的信号与正常信号一致的时刻,本文的方法无法分辨。 在实际系统中,每一段直线电机都安装有一台切换传感器盒,利用本文的方法可直接定位至故障的切换传感器盒,通过更换备件的方法可实现部件级维修。 针对长初级短次级直线电机切换控制传感器的失效问题,提出了一种切换传感器故障的在线诊断与定位方法。根据次级运动时产生的切换传感信号,提出数据压缩方法和搜索限制条件,从而提高计算效率。根据次级运动的变化规律,定义了切换传感器的标准信号集合,给出了计算传感信号差异度的方法,利用有向图对问题进行描述,并提出了最优搜索算法,给出了切换传感器故障诊断与定位流程,提出了3个命题并给出了具体证明过程以说明算法过程与期望结果的一致性。最后通过实验验证了方法的有效性。本方法为无位置数据情况下分段供电切换控制系统的在线故障诊断提供了一种有效途径。 References) [1] 董海军. 卧龙磁悬浮列车试验线牵引供电系统的研究[D]. 杭州: 浙江大学, 2007. DONG Haijun. Research on the power supply system of Wolong maglev test line[D]. Hangzhou: Zhejiang University, 2007.(in Chinese) [2]ThorntonR,ThompsonMT,PerreaultBM,etal.Linearmotorpoweredtransportation[J].ProceedingsoftheIEEE, 2009, 97(11): 1754-1757. [3] 周大进, 马家庆, 赵立峰, 等.真空管道HTS磁浮列车实验系统环形加速器设计[J]. 真空科学与技术学报, 2015, 35(4): 391-398.ZHOUDajin,MAJiaqing,ZHAOLifeng,etal.Designofring-shapedacceleratorforhightemperaturesuperconductingmaglevtrainsmovinginevacuatedtube[J].ChineseJournalofVacuumScienceandTechnology, 2015, 35(4): 391-398. (inChinese) [4] 黄永刚, 王素玉, 王家素, 等. 高温超导磁悬浮冷发射装置供电控制系统的设计[J]. 低温与超导, 2007, 35(2): 121-124.HUANGYonggang,WANGSuyu,WANGJiasu,etal.Thepowersupplycontrolsystemdesignofhightemperaturesuperconductingmaglevlaunchsystem[J].CryogenicsandSuperconductivity, 2007, 35(2): 121-124. (inChinese) [5] 上官璇峰, 励庆孚, 袁世鹰.多段初级永磁直线同步电动机驱动系统整体建模和仿真[J].电工技术学报, 2006, 21(3): 52-57.SHANGGUANXuanfeng,LIQingfu,YUANShiying.lntegratedmodelingandsimulationofthesystemsdrivenbymulti-segmentprimarypermanentlinearsynchronousmotors[J].TransactionofChinaElectrotechnicalSociety, 2006, 21(3): 52-57. (inChinese) [6] 上官璇峰, 励庆孚, 袁世鹰.多段初级永磁直线同步电机驱动的垂直提升系统[J].中国电机工程学报, 2007, 27(18): 7-12.SHANGGUANXuanfeng,LIQingfu,YUANShiying.TheverticalhoistsystemdrivenbyPMLSMwithmulti-segmentprimary[J].ProceedingsoftheChineseSocietyforElectricalEngineering, 2007, 27(18): 7-12. (inChinese) [7]MichaelRD,DouglasJS,ThomasC,etal.Electromagneticaircraftlaunchsystem—EMALS[J].IEEETransactionsonMagnetics, 1995, 31(1): 528-553. [8]PattersonD,MontiA.Designandsimulationofanelectromagneticaircraftlaunchsystem[C]//ProceedingsofIEEE33rdAnnualPowerElectronicsSpecialistsConference, 2002: 1475-1480. [9] 鲁军勇, 马伟明, 孙兆龙. 多段初级直线感应电动机静态纵向边端效应研究[J]. 中国电机工程学报,2009, 29(33): 95-101.LUJunyong,MAWeiming,SUNZhaolong.Researchonstaticlongitudinalendeffectoflinearinductionmotorwithmulti-segmentprimary[J].ProceedingsoftheChineseSocietyforElectricalEngineering, 2009, 29(33): 95-101. (inChinese) [10] 上官璇峰, 励庆孚, 袁世鹰.分段初级PMLSM提升系统能耗制动时电路切换故障分析[C]//2006年全国直线电机学术年会, 2006: 174-180.SHANGGUANXuanfeng,LIQingfu,YUANShiying.Analysisonthecircuitswitchfaultoftheverticalhoistsystemdrivenbymulti-segmentprimaryPMLSMforenergy-lossbrake[C]//ProceedingsoftheLinearMotorSymposiumof2006, 2006: 174-180. (inChinese) [11] 于芳, 余海涛, 胡敏强.长定子直线同步电机电磁推力计算和故障分析[J]. 微电机, 2010(8): 31-34.YUFang,YUHaitao,HUMinqiang.Thepropulsionforcecomputationandfaultanalysisofthelong-statorlinearsynchronousmotors[J].Micromotors, 2010(8): 31-34. (inChinese) [12] 崔小鹏, 王公宝, 马伟明, 等.直线电机分段供电故障诊断研究[J].电机与控制学报, 2013, 17(8): 9-14.CUIXiaopeng,WANGGongbao,MAWeiming,etal.Researchonfaultdiagnosisofsegment-poweredlinearinductionmotor[J].ElectricMachinesandControl, 2013, 17(8): 9-14. (inChinese) [13] 张娅玲, 陈伟民, 章鹏, 等.传感器故障诊断技术概述[J].传感器与微系统, 2009, 28(1): 4-6.ZHANGYaling,CHENWeimin,ZHANGPeng,etal.Overviewonsensorfaultdiagnosistechnology[J].TransducerandMicrosystemTechnologies, 2009, 28(1): 4-6. (inChinese) [14] 黎梨苗, 陆绮荣, 徐永杰.基于硬件冗余的传感器故障诊断研究[J].微计算机信息, 2008, 24(19): 211-212.LILimiao,LUQirong,XUYongjie.Researchofsensorfaultdiagnosisbasedonhardwareredundancy[J].MicrocomputerInformation, 2008, 24(19): 211-212. (inChinese)[15] 谭平, 蔡自兴, 余伶俐.不同精度的冗余传感器故障诊断研究[J].控制与决策, 2011, 26(12): 1909-1912. TAN Ping, CAI Zixing, YU Lingli. Research on fault diagnosis of different precision redundant sensors[J]. Control and Dicision, 2011, 26(12): 1909-1912. (in Chinese) [16] 冯志刚, 王祁, 徐涛, 等.基于小波包和支持向量机的传感器故障诊断方法[J].南京理工大学学报:自然科学版, 2008, 32(5): 609-614. FENG Zhigang, WANG Qi, XU Tao, et al. Sensor fault diagnosis based on wavelet packet and support vector machines[J]. Journal of Nanjing University of Science and Technology: Natural Science, 2008, 32(5): 609-614. (in Chinese) [17] 赵志刚, 赵伟.基于动态不确定度理论的多传感器系统传感器失效检测方法[J].传感技术学报, 2006, 19(6): 2723-2726. ZHAO Zhigang, ZHAO Wei. A new sensor fault detection method based on dynamic uncertainty theory[J]. Chinese Journal of Sensors and Actuators, 2006, 19(6): 2723-2726. (in Chinese) [18] 李自成, 刘新芝, 曾丽, 等.无刷直流电机转子位置传感器故障诊断及容错策略[J].微电机, 2014, 47(4): 59-61. LI Zicheng, LIU Xinzhi, ZENG Li, et al. Fault diagnosis and fault-tolerant control strategy for rotor position of brushless DC motor drives[J]. Micromotors, 2014, 47(4): 59-61. (in Chinese) [19] 周近, 莫晓晖.开关磁阻电机位置传感器故障的实时诊断与容错控制研究[J].电机与控制应用, 2015, 42(6): 77-84. ZHOU Jin, MO Xiaohui. Research of fault real-time diagnosis and fault-tolerant control of position sensors for switched reluctance motors[J]. Electric Machines & Control Application, 2015, 42(6): 77-84. (in Chinese) [20] 翟毅涛.中低速磁浮列车传感器故障检测[D].长沙:国防科学技术大学, 2009. ZHAI Yitao. Fault detection of sensors in middle-low velocity maglev train[D]. Changsha: National University of Defence Technology, 2009. (in Chinese) Online fault diagnosis method of segment-powered switch control sensor XU Xinghua, MA Weiming, CUI Xiaopeng, ZHANG Mingyuan, LI Wenlu (National Key Laboratory of Science and Technology on Vessel Integrated Power System,Naval University of Engineering, Wuhan 430033, China) Segment-powered switch control sensor is an important component for the segmented linear motor control system. For the problems of fault diagnosis and location, an online fault diagnosis method of switch control sensor was proposed. Sensor signal data were compressed to improve computational efficiency; the law of switch control sensor signals changing with shuttle movement was studied, and a set of standard signals were defined; a calculating method for the sensor signal difference which is considered as a quantitative indicator of similarity analysis of signal was given; this problem was represented as the search problem of directed graph and the search was narrowed to a smaller area according to the characteristics of the problem; the search algorithm was given for estimating the process of system state transition according to the metrical data of sensor signals; the fault location process was proposed on the basis of the standard signal set,then the faults were located with the estimated results of the algorithm. Three propositions were given and proved to discuss the consistency between the algorithm and the expected result. The fault diagnosis method was validated through the fault data analysis of actual prototype. segment-powered; linear induction motors; switch control sensor; fault diagnosis; directed graph 10.11887/j.cn.201606005 2016-04-02 国家自然科学基金资助项目(51477178);国家重点基础研究发展计划资助项目(2013CB035601) 徐兴华(1982—),男,辽宁大连人,副研究员,博士,E-mail:xinghuaxv@163.com TM359 A 1001-2486(2016)06-024-13 http://journal.nudt.edu.cn

4 算法的一致性







5 实验验证



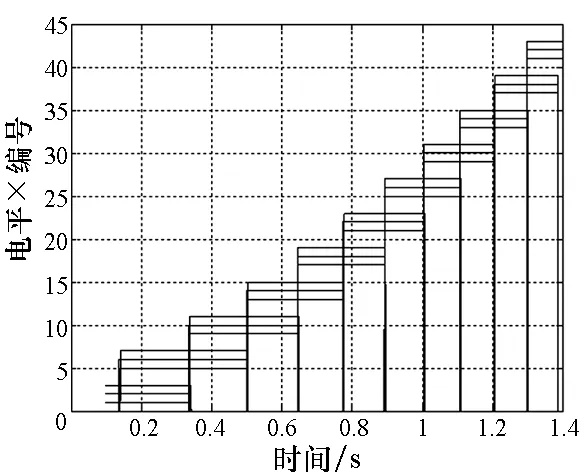
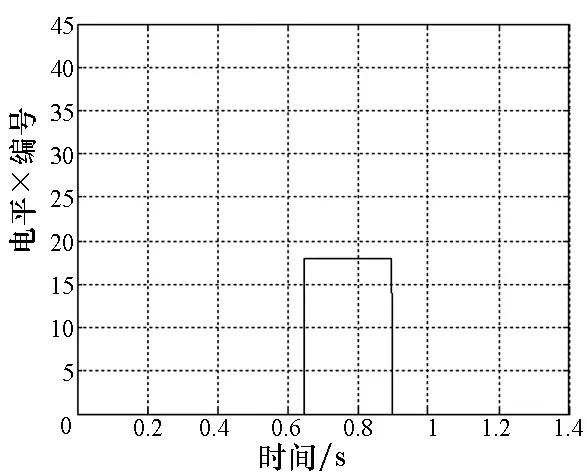
6 结论
