阻拦索张力控制方法*
2017-01-07张晓谞张育兴欧阳斌汪光森
张晓谞,张育兴,刘 勇,欧阳斌,汪光森
(海军工程大学 舰船综合电力技术国防科技重点实验室, 湖北 武汉 430033)
阻拦索张力控制方法*
张晓谞,张育兴,刘 勇,欧阳斌,汪光森
(海军工程大学 舰船综合电力技术国防科技重点实验室, 湖北 武汉 430033)
飞机阻拦装置是机场保证飞机正常降落和拦阻因意外原因冲出跑道的飞机的重要保障设施。针对现有机械型阻拦装置难以适应未来多种机型阻拦需求的现状,提出一种以阻拦电机为吸能元件的电磁阻拦装置,搭建考虑阻拦索弯折波影响在内的电磁阻拦装置模型,设计电磁阻拦装置的闭环控制算法,并利用仿真进行了验证。
阻拦装置;阻拦电机;绳索动力学;阻拦索张力;闭环控制;速度轨迹
飞机阻拦系统是机场的重要保障设施,其作用是对正常降落和因意外原因冲出跑道的飞机进行拦阻[1],保障人机安全[2]。随着经济的发展,飞机阻拦系统的发展更应适应未来改建和航空口岸建成后对安全保障能力的需求。最初的阻拦设备仅用来防止飞机在起飞和着陆时发生飞行事故,目前阻拦设备已从单一的应急安全防护装置向正常着陆阻拦设施发展。
国外飞机阻拦设备发展很快,美国的应用起步较早,他们根据各型飞机的飞行任务要求,竞相研制了多种形式的机械式飞机阻拦系统[3],包括MAG型以水涡轮为能量吸收装置的飞机拦阻系统、PORTARREST型液压控制旋转多盘摩擦式制动器式飞机阻拦系统以及MK7型液压缓冲拦阻系统[4]。目前,中国现有的飞机拦阻设备是水涡轮式固定型的(LZ系列)[5],其主要作用还仅仅局限在防止飞机中断起飞或飞机着陆时冲出起降地段,远不能满足新型飞机的拦阻需求。
由于上述拦阻系统均为机械型式拦阻系统,它的阻拦容量和拦停距离都是针对具体机型的,无法兼顾阻拦容量范围内的各种飞机[6]。为了匹配最大能级的飞机拦停需求,当对小飞机进行拦阻时会出现过载峰均力比很大的情况,而当更大能级的机型出现或机场受到条件限制需要缩短拦停距离时,就需要重新设计专用阻拦设备才能满足需求,调节起来极不灵活。另外,机械式的阻拦系统本质上是开环调节系统,在飞机阻拦过程中,当阻拦轨迹与预期不相符时无法及时调节。
为了弥补现役阻拦装置的不足,美国在20世纪90年代率先提出了机电混合型先进阻拦装置(Advanced Arresting Gear, AAG)的研究计划[7]。相比传统机械式的阻拦装置[8],先进阻拦装置阻拦范围广,且阻拦过程采用闭环控制,显著降低了阻拦过程中的峰均力比。然而,由于先进阻拦装置采用的是电机及水涡轮为吸能元件的混合型方案[9],在阻拦调节过程中仍然不够灵活,为此提出一种电磁阻拦装置方案,其系统构成如图1所示。其特点为完全采用电机作为阻拦过程的调节及吸能元件,以便充分利用电机完全精确可控的优点,实现在飞机阻拦过程中对其阻拦轨迹进行实时闭环调节。
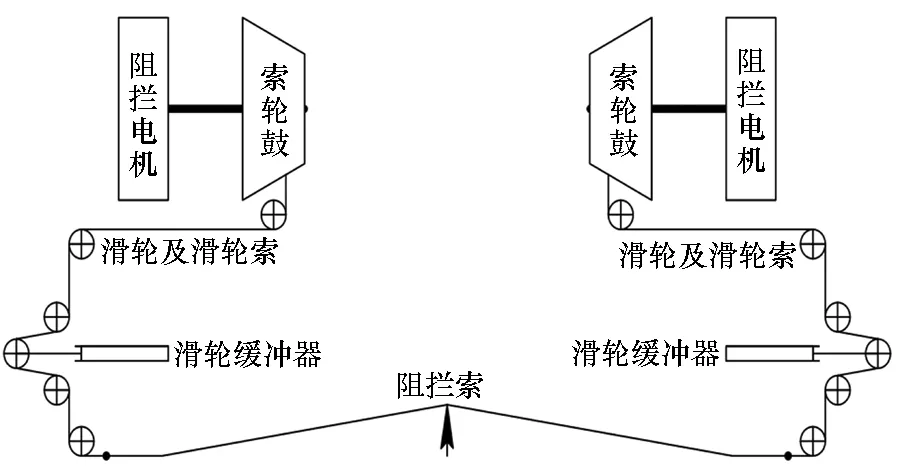
图1 电磁阻拦系统构成图Fig.1 Electromagnetic arresting system principle
1 电磁阻拦装置组成及工作原理
电磁阻拦装置如图1所示,它由阻拦索、滑轮缓冲器、索轮鼓、阻拦电机及其调节控制系统等组成。它的基本工作原理是:飞机冲索之后拉动阻拦索向前运动,进而通过阻拦索和滑轮索带动索轮鼓旋转放绳,将飞机的直线运动转换成索轮鼓、阻拦电机的同轴旋转运动。在这过程中,通过对阻拦电机施加反向的阻力转矩以吸收飞机的动能,使得飞机在给定的距离内制动下来。
电磁阻拦装置可以在阻拦之前先设定好飞机的阻拦轨迹,在阻拦过程中,实时检测飞机的阻拦轨迹,并通过对阻拦电机转矩的精确调节使得飞机的实际阻拦轨迹能够良好地跟踪设定轨迹,从而达到对飞机的阻拦过程进行精确闭环控制的目的。与传统的机械阻拦装置相比,该装置具有阻拦范围宽、阻拦过程精确可控等优点。在阻拦过程中通过灵活地改变阻拦电机输出转矩使阻拦索上的张力始终保持在安全范围内,大幅度提高了阻拦性能,从而可以阻拦更高能级的飞机。
2 电磁阻拦装置建模
为了分析电磁阻拦装置的阻拦特性,利用MATLAB/Simulink模块搭建了电磁阻拦装置全系统模型,具体如下所示。
2.1 飞机运动方程
飞机冲索情况及阻拦索布置几何结构如图2所示。其中:FH为飞机推力,Lo为跑道两侧导向轮至跑道中线的距离,S为飞机阻拦过程中绳索被拉出的长度,x为冲跑距离,Fc为绳索张力。
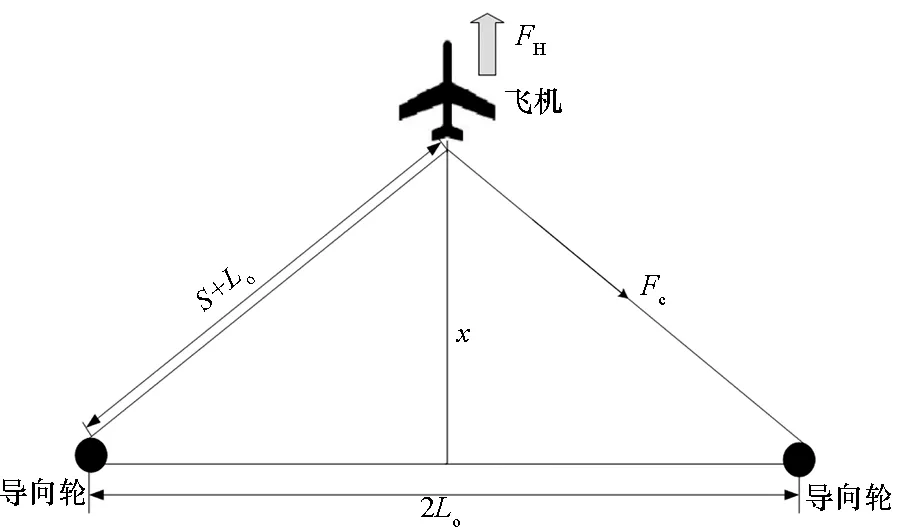
图2 飞机对中冲索几何示意图Fig.2 Center arrestment geometry
为了简化建模,首先作如下假设:
1)跑道为平面,飞机航向与道面平行;
2)分析阻拦力时只考虑飞机对称平面内飞机航向的运动,忽略其他方向的力;
3)忽略绳索—滑轮动力学;
4)忽略滑轮缓冲器的运动过程;
5)暂不考虑飞机偏心偏航的情况。
飞机冲索之后,拉动阻拦索向前运动,则可以得到阻拦过程中飞机运动方程为:
(1)
式中,Ma为飞机质量,Va为飞机速度,其他变量与图2中变量一致。
根据图2,不难得到飞机的速度及冲跑距离与阻拦索的放索速度及长度之间的关系:
(2)
式中,S为飞机阻拦过程中绳索被拉出的长度,VS为阻拦装置放索速度。
2.2 阻拦索建模
由于飞机挂索瞬间速度很大,阻拦索会受到很大的冲击,将在索上形成应力波[9]。此时绳索由直线预紧状态变为三角形布局的应力传播状态,这种应力波被称为弯折波[10]。弯折波沿着绳索的轴线方向传播。随着阻拦过程的进行,飞机的滑行速度不断下降,尾钩将绳索不断地平稳拉出,弯折波就向左、右两侧导向轮传播,如图3所示。P为挂索点,v0为挂索时速度,在冲击之后的t时刻,索的应力波恰好到达R点,则此时绳索的运动形式将以弯折点Q为界分为两部分,PQ部分以速度v0沿着β方向运动,RQ部分以速度u由R向Q运动,而在R右边的部分则仍处于静止状态,弯折点Q(横波)则以相对于索的速度ω沿着索向右运动。
当弯折波的折点达到导向轮时, 导向轮会对阻拦索产生冲击作用,称为再次冲击。在再次冲击的作用下,导向轮处的绳索应力瞬间增大,并且沿着滑轮两侧的绳索传播,与原弯折波的轴向应力叠加。同时在再次冲击的作用下,两侧导向轮处的阻拦索也产生了新的弯折波,向绳索中心点处传播,改变了原弯折波的形状。当新的弯折波传播到飞机的尾钩处时将发生反射的现象。反射回来的应力波会再与导向轮发生冲击作用,再产生新的弯折波,不断在尾钩和导向轮间重复着这一过程。
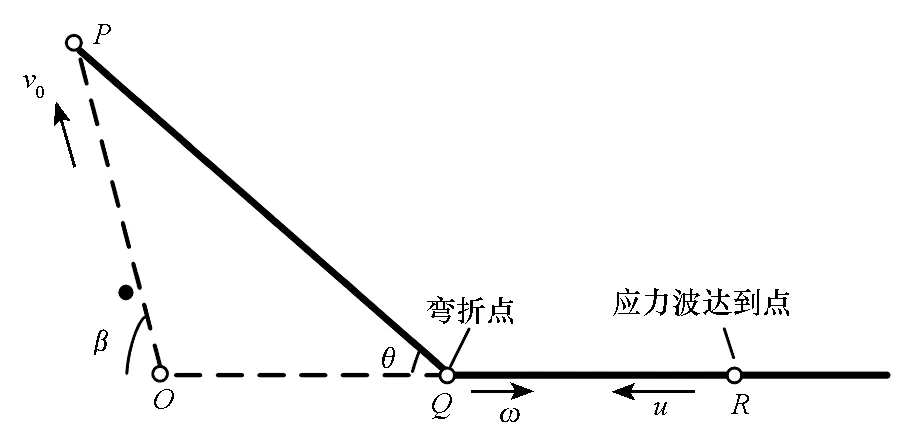
图3 弯折波传播图示Fig.3 Spread of kink wave
为了准确考虑阻拦索弯折波的影响,借鉴有限元数值计算的思路,将阻拦索细分为数个单元,每个单元用一节点表示,如图4所示。图中Sc(n)为当前每个节点代表的阻拦索长度,Fc(n)为节点所受的阻拦索张力,ε(n)为每段阻拦索的应变。
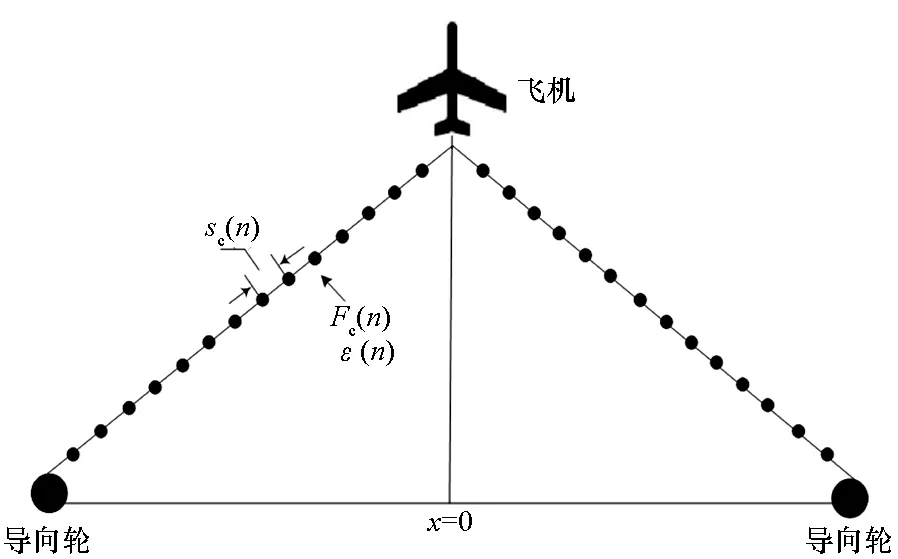
图4 阻拦索节点示意图Fig.4 Cable nodes of arresting gear
则每个节点上的阻拦索张力为:
(3)
式中,k为弹性系数,β为阻尼比,Sco(n)为此段阻拦索对应的初始长度。
另外,对滑轮缓冲器、阻拦电机等其他设备建模可参考文献[5,11],这里不再赘述。
3 阻拦控制策略
3.1 阻拦轨迹生成
在阻拦过程中,期望飞机能够匀减速以便尽可能地减小阻拦过程的峰均力比。为此,设计飞机的阻拦轨迹如下:假设飞机初始速度为Vo,初始位置x=0,阻拦距离为xf,则在匀减速的情况下,可以得到速度与位置、加速度的表达式为:
(4)
图5 匀减速时速度与位置关系曲线Fig.5 Velocity versus position with constant deceleration

(5)
则电机的给定角速度和角加速度为:
(6)
3.2 阻拦闭环控制
如前所述,阻拦的闭环控制是通过对阻拦电机转矩的控制来实现的,其基本思路是:在阻拦过程中实时检测电机的转速,并与阻拦给定转速进行对比,计算两者的误差,进而通过比例积分控制生成电机反馈转矩:
(7)
式中,kp为比例增益,ki为积分增益。
另外,为了加快电机的响应速度,根据给定轨迹生成电机的前馈转矩为:
(8)
式中,J为阻拦机轴系转动惯量。则电机指令转矩为:
T*=Tff+Tfb
(9)
4 仿真验证
为了验证上述算法的有效性,利用仿真模型对美军的重型快速飞机(F18-E/F)进行了仿真分析。飞机质量为24 000 kg,阻拦速度为 80 m/s[12-13]。
图6为阻拦过程中的飞机速度,从图中可以看到,仿真的阻拦轨迹能够较好地跟踪给定轨迹,阻拦过程耗时3 s左右。图7为阻拦过程中的阻拦索张力,从图中可以看到在整个阻拦过程中,阻拦索张力的主要波动范围和最大值出现在飞机撞索前期,后期张力变化非常平缓,整个阻拦过程的峰均力比为1.19,与传统机械型阻拦装置相比,其有了显著的改善,从而验证了所提算法的有效性。
图6 飞机速度仿真结果Fig.6 Simulation results of aircraft velocity
图7 阻拦索张力仿真曲线Fig.7 Simulation curve of arresting cable tension
5 结论
本文提出一种新型的以阻拦电机为末端能量转换装置的电磁阻拦装置,建立了考虑阻拦索弯折波的影响在内的电磁阻拦装置的系统模型,提出了电磁阻拦装置阻拦索张力的控制策略,并利用仿真模型验证了所提控制算法的有效性。
References)
[1] Brahney J H. Mobile arresting system now being deployed[J]. Aerospace Engineering, 1986(6): 22-26.
[2] 车小雪. 基于飞机阻拦降落的人体冲击动力学响应分析与研究[D]. 天津: 天津科技大学, 2013: 4-5. CHE Xiaoxue.A study and analysis of the human impact dynamic responses based on STOBAR[D]. Tianjin:Tianjin University of Science & Technology, 2013: 4-5.(in Chinese)
[3] Koper K T. Arrestment system:US4311290[P]. 1982-01-19.
[4] 黄胜, 郑茂, 王超. 液压阻拦机定长冲跑控制规律优化研究[J]. 北京理工大学学报, 2014(6): 607-612. HUANG Sheng, ZHENG Mao, WANG Chao. Optimization for the constant runout control system of arresting gear[J]. Transactions of Beijing Institute of Technology, 2014(6): 607-612.(in Chinese)
[5] 朱齐丹, 闻子侠, 张智.阻拦系统动力学建模与仿真[J]. 航空学报, 2012, 33(3): 520-529. ZHU Qidan, WEN Zixia, ZHANG Zhi. Kinetic modeling and simulation of shipboard arresting system[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(3): 520-529. (in Chinese)
[6] 吴娟. 飞机阻拦系统分析与控制研究[D]. 西安: 西北工业大学, 2003: 15-17. WU Juan. Research on analysis and control method of aircraft arresting system[M]. Xi′an: Northwestern Polytechnical University, 2003: 15-17.(in Chinese)
[7] Patton J. Arresting gear program completes reliability testing[Z]. General Atomics and Affiliated Companies, San Diego, California, 2009-10-20.
[8] 张智, 闻子侠, 朱齐丹. 舰载机阻拦过程动力学仿真[J]. 哈尔滨工程大学学报, 2014(5): 571-579. ZHANG Zhi, WEN Zixia, ZHU Qidan. Three numerical methods used for predicting ship resistance and flow field[J]. Journal of Harbin Engineering University, 2014(5): 571-579. (in Chinese)
[9] 万晨. 舰载机拦阻装置刚柔耦合系统建模及动态特性研究[D].哈尔滨: 哈尔滨工程大学, 2013: 8. WAN Chen.Research on rigid-flexible coupling model and dynamic character of carrier-based aircraft arresting system[D]. Harbin:Harbin Engineering University, 2013: 8. (in Chinese)
[10] 张新禹. 阻拦索的动力学特性分析及仿真研究[D]. 哈尔滨: 哈尔滨工程大学, 2011: 9. ZHANG Xinyu. Dynamic analysis and simulation of arresting cable[D]. Harbin:Harbin Engineering University, 2011: 9. (in Chinese)
[11] Zhang Y X, Zhang M Y, Ma W M, et al. Modeling of a double-stator linear induction motor[J]. IEEE Transactions on Energy Coversion, 2012, 47(11): 572-579.
[12] Mc Donnell Douglas Corporation. NATOPS flight manual navy model F/A-18E/F 165533 and up aircraft[R].US Navy A1-F18EA-NFM-000, 2008.
[13] 陈稗, 昂海松. F/A-18F舰载飞机起降特性分析[J]. 南昌航空大学学报(自然科学版), 2011, 25(3): 66-74. CHEN Bai, ANG Haisong. Analysis of take-off and landing characteristics of F/A-18F carrier-based aircraft[J]. Journal of Nanchang Hangkong University(Natural Sciences), 2011, 25(3): 66-74. (in Chinese)
Method of arresting cable tension control
ZHANG Xiaoxu, ZHANG Yuxing, LIU Yong, OUYANG Bin, WANG Guangsen
(National Key Laboratory of Science and Technology on Vessel Integrated Power System, Naval University of Engineering, Wuhan 430033, China)
Aircraft arresting gear is a vital safety device for the airfield to ensure normal landing and block the aircrafts which are accidentally out of runway. According to the condition that the mechanical arresting gear used at the present stage cannot meet the arresting needs of future carrier aircraft types, a kind of electromagnetic arresting gear with arresting electric motor as energy absorption components was put forward. A model of electromagnetic arresting gear considering the effects of kink wave was built. The closed-loop control algorithm of electromagnetic arresting gear was designed and was validated by simulation.
arresting gear; arresting motor; cable dynamics; arresting cable tension; closed-loop control; velocity trajectory
10.11887/j.cn.201606008
2016-04-08
国家重点基础研究发展计划资助项目(2013CB035601);国家自然科学基金资助项目(51477179)
张晓谞(1990—),女,山东济南人,博士研究生,E-mail:mofei39@126.com; 张育兴(通信作者),男,副研究员,博士,E-mail:z.yu.xing@163.com
TN95
A
1001-2486(2016)06-049-05
http://journal.nudt.edu.cn
