PPP与DGPS在IMU/GPS辅助1∶10000航测项目中的应用研究
2017-01-07王晓艳
王晓艳 杨 超 梁 石 王 安
(陕西测绘地理信息局测绘开发服务中心/西安华测航摄遥感有限公司,陕西 西安,710054)
PPP与DGPS在IMU/GPS辅助1∶10000航测项目中的应用研究
王晓艳 杨 超 梁 石 王 安
(陕西测绘地理信息局测绘开发服务中心/西安华测航摄遥感有限公司,陕西 西安,710054)
IMU/GPS辅助航空摄影技术可减少外业像控点测量工作量,进而缩短航摄成图周期,多应用于1∶10 000比例尺成图项目中。POS数据解算方法分为精密单点定位与差分GPS两种,本文结合商南项目(地面分辨率为0.5m),对两种解算方法得出的外方位元素进行比较分析,采用带控制点的POS辅助空三加密方法,经对空三加密地面检查点精度分析,分析两种解算结果能否满足1∶10 000比例尺成图精度。
精密单点定位 差分GPS POS辅助 精度
1 引言
IMU/GPS辅助航空摄影技术是当前使用较广泛的一种辅助航空摄影技术,该技术利用惯性测量单元(IMU)和全球定位系统(GPS)的组合测量技术,获取摄影瞬间摄影中心的位置参数及影像的姿态参数的一种航空摄影技术[1]。该技术的一项关键技术是POS数据解算技术。POS解算方法根据是否采用地面基站,分为精密单点定位和差分GPS定位两种。
在IMU、GPS硬件设备相同的情况下,POS解算精度的不同与采用的解算方法有关,POS解算精度又将影响成图精度。IMU/GPS辅助航空摄影技术多在1∶10 000比例尺测图项目中应用,技术优势发挥得也比较显著。本文结合商南项目(航摄仪为UCXp WA,地面分辨率为0.5m),选取合适的试验区域,比较分析两种解算结果,采用带控制点的POS辅助空三加密方法,经对空三加密地面检查点精度分析,分析两种解算结果能否满足1∶10 000比例尺成图精度。
2 精密单点与差分GPS定位
精密单点定位(PPP—Precise Point Positioning)是利用载波相位观测值以及由IGS等组织提供的高精度的卫星星历及卫星钟差来进行高精度单点定位的方法。目前,根据一天的静态观测值所求得的平面位置精度可达2-3cm,高程精度可达3-4cm,实时定位的精度可达分米级[2]。PPP技术具有全天候、无需参考站和高精度定位的优点,一直为科研项目和民用工程提供可靠、高精度的定位保障。精密单点定位技术为IMU/GPS辅助航空摄影项目提供了新的解决方案,若在解算精度满足要求的情况下,采用该技术可以省掉地面基站的布设、观测和计算工作。
差分GPS(DGPS—Differential GPS)是利用已知精确三维坐标的差分GPS基准台,求得伪距修正量或位置修正量,将这个修正量实时或事后发送给用户(GPS导航仪),对用户的测量数据进行修正,以提高GPS定位精度[3]。单站差分GPS建立在用户的位置或距离误差与基准站的误差完全相同这一基础之上。当用户离基准站较近时(例如S<20km),这种方法的定位精度有可能达到亚米级;当间距增加至200km时,定位精度将下降为5~10m[2]。差分GPS的优点是不需要考虑复杂的误差模型,解算模型简单、待估参数少、定位精度高,因此被广泛应用在IMU/GPS辅助航空摄影测量中。其不足之处在于:作业时至少需要一台接收机置于基站上进行同步连续观测。对于人烟稀少、偏远的荒漠、戈壁区域,建设基站存在很大的困难。
实践中,采用PPP技术,完全可以达到厘米级的定位精度。与精密的差分GPS结果比较,PPP技术的动态绝对定位精度优于40cm。静态精密单点定位技术可以达到厘米级的定位精度,动态定位精度也可以达到几十厘米[4]。
3 试验数据情况
商南项目采用UCXp-WA数码航摄仪实施航空摄影,地面分辨率为0.5m,POS系统为Applanix公司的POS AV510 V6,成图比例尺为1∶10 000。试验区选在商南项目航摄04分区的商南县附近区域,面积约2011km2,东西向约50km,南北向约40km。试验区范围覆盖四幅1∶5万图幅(图号分别为:I49E015011、I49E015012、I49E016011、I49E016012)。地形以山地为主,少量高山地。试验区的摄站点、控制点及检查点分布情况如图1所示。
试验区使用的航摄仪、飞机、地面分辨率、航向旁向重叠度、控制点及检查点等技术参数见表1所示。
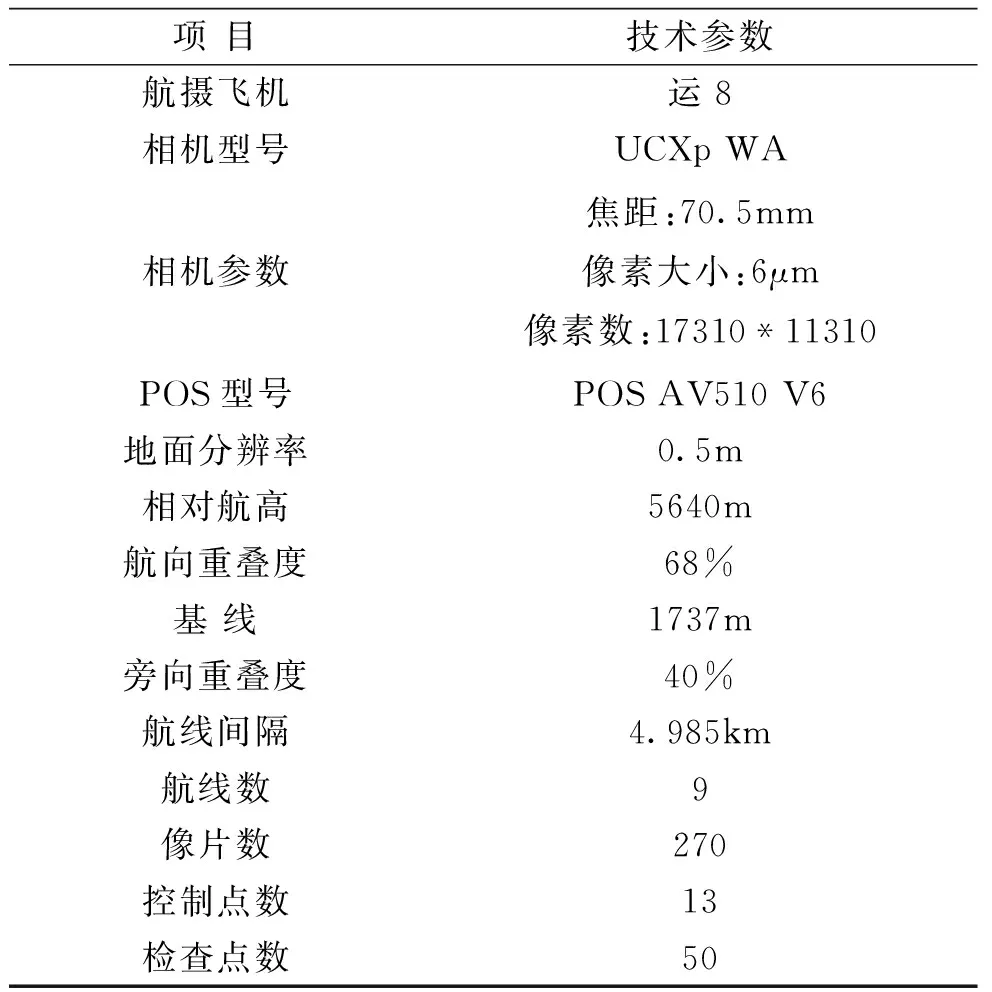
表1 试验样区技术参数
4 POS数据解算
精密单点与差分GPS解算在POS数据解算的流程上基本一致,主要有以下四个步骤,应用POS系统配套的POS数据解算软件POSPac 7.1解算POS数据。主要步骤如下:
(1)IMU/DGPS数据预处理。对每个架次飞行的IMU/DGPS数据(包括机载GPS观测数据、IMU记录数据、Event Mark数据、差分GPS解算时还包括基站数据)进行预处理,预处理完成后检查POS数据是否完整、有无漏片的问题;(2) IMU/DGPS数据滤波计算。应用软件解算对GPS数据和IMU数据进行联合解算,经卡尔曼滤波得出每张像片摄站点(投影中心)的粗精度的6个外方元素;(3) 检校场空中三角测量、求解系统偏差。利用检校场地面控制点和检查点进行空三加密计算,空三精度符合规范要求后,将空三得到的检校场外方位元素与IMU/DGPS数据滤波计算得到的外方位元素比较,得到外方位元素的系统偏差;(4) 检校计算及成果输出。对每张像片的6个外方位元素进行系统偏差改正,输出每张像片经系统改正后的外方位元素成果。
当采用精密单点定位解算时,软件会自动下载飞行当天的精密卫星星历、精密卫星钟误差等数据。这种精密轨道产品宜采用IGS组织提供的。IGS组织拥有全球范围内420多个永久GNSS跟踪站,其地心坐标经度约3cm,分布更加合理,精密卫星星历和卫星钟误差一般在7—14天后发布。
采用DGPS方法解算时,导入基站数据,试验区选用的基站距离试验区内的摄站点距离为30-170km。
5 PPP与DGPS解算结果比较分析
使用商南试验区的数据,共涉及9条航线(5-7航线是一个架次飞行,8-13航线是另一个架次飞行),航线东西方向布设,每条航线30张像片,共270张像片。
外方位元素成果采用的坐标系统为:
平面坐标系:2000国家大地坐标系。
高程基准:大地高。
投影与分带方式:采用高斯-克吕格投影,采用3度分带。
PPP解算结果与DGPS解算结果三个线元素之间的较差统计结果如表2所示。

表2 PPP解算结果与DGPS解算结果 三个线元素较差统计表 单位:米
PPP解算结果与DGPS解算结果三个线元素之间的较差统计图如图2所示。
PPP解算结果与DGPS解算结果三个角元素之间的较差统计结果如表3所示。

表3 PPP解算结果与DGPS解算结果 三个角元素差值统计表 单位:度
PPP解算结果与DGPS解算结果三个角元素之间的较差统计图如图3所示。
比较分析得出如下结论:
(1)对同一个架次同一个像主点而言,分别使用精密单点定位和差分GPS两种解算方法得出的外方位元素差距在同一个数量级内,且同一条航线内的较差接近一致;(2)使用精密单点定位和差分GPS两种解算方法得出的外方位元素之间的较差与飞行架次、航线有一定的相关性,在同一架次、同一航线内的较差呈现出较为一致的规律性。
6 试验方法及成图精度分析
6.1 试验方法
采用带地面控制点的POS辅助空三加密法,外方位元素值分别使用精密单点定位、差分GPS两种解算方法得出的两组成果,借助空三软件比较外业实测检查点的精度,分析两种解算结果能否满足1∶10 000比例尺成图精度。
POS辅助定向法的实际精度,可以利用n个地面检查点的坐标值(野外实测)和POS辅助定向值之间的偏差(ΔX,ΔY,ΔZ),按下公式1求出[5]:
(1)
式中,μxy为总体平面实际精度,μz为总体高程实际精度,n为检查点个数。
6.2 精度分析
空中三角测量像点采集和POS辅助空三平差解算都是在PixelGrid软件中进行,13个外业控制点参与定向计算,50个检测点作为检查点使用,PPP和DGPS使用相同的控制点和检测点。控制点和检查点的坐标系统与外方位元素成果采用的坐标系统一致。
空三加密检查点中误差见表3所示。
GB/T 23236-2009《数字航空摄影测量 空中三角测量规范》、GB/T 13990-2012《1∶5000、1∶10000地形图航空摄影测量内业规范》中规定,成图比例尺1:10000平地平面位置中误差为3.5m,高程中误差为0.3m(此项见GB/T 23236-2009规范);丘陵地平面位置中误差为3.5m,高程中误差为1.0m;山地平面位置中误差为5.0m,高程中误差山地2.0m;高山地平面中误差为5.0m,高程中误差为3.0m[6],[7]。
从表中结果可以看出,商南试验区采用PPP、DGPS两种解算方法得出的两组外方位元素,可满足1∶10 000比例尺地形图平地、丘陵地、山地、高山地地形的平面精度要求,满足山地、高山地地形的高程精度要求。
7 结束语
本文对商南试验区采用PPP、DGPS解算方法得出的两组像片外方位元素比较分析得出,两组外方位元素之间存在一定的差值,与架次、航线有一定的相关性。经试验分析,当采用带地面控制点的POS辅助空三加密方法时,PPP、DGPS解算方法得出的外方位元素成果均可满足1∶10 000比例尺地形图山地、高山地地形的平面、高程精度要求。
对于布测地面基站困难的1∶10 000 POS辅助航测项目,采用精密单点定位解算方法与差分GPS解算方法相比,可省掉地面基站的布设、观测和计算工作,有很大的优势和应用前景,下一步仍需要结合更多的试验数据进行这方面的试验研究。
[1] GB/T 27919-2011.IMU/GPS辅助航空摄影技术规范[S].北京:中国标准出版社,2012.
[2] 李征航,黄劲松.GPS测量与数据处理[M].湖北武汉:武汉大学出版社,2005.
[3] 徐绍铨,张华海,杨志强等. GPS测量原理及应用[M].湖北武汉:武汉大学出版社,2008.
[4] 刘焱雄,周兴华,张卫红等.GPS精密单点定位精度分析[J].海洋测绘,2005,(1):44-46.
[5] Yuan Xiuxiao.A Novel Method of Systematic Error Compensation for a Position and Orientation System[J].Progress in Natural Science,2008,18(8):953-963.
[6] GB/T 23236-2009.数字航空摄影测量 空中三角测量规范[S]. 北京:中国标准出版社,2009.
[7] GB/T 13990-2012.1∶5000、1∶10000地形图航空摄影测量内业规范[S].北京:中国标准出版社,2012.
Research on PPP and DGPS Applying in IMU/GPS-supported 1∶10000 Photogrammetry Project
WANG Xiao-yan,YANG Chao, LIANG Shi,WANG An
(The Development and Service Center of Shaanxi Administration of Surveying&Mapping /Xi’an Huace Aerial Photography and Remote Sensing Co.,Ltd, Xi’an Shanxi 710054,China)
The technology of IMU/GPS supported aerial photography can reduce workload of photo control survey and shorten the period of aerophotogrammetrical mapping. It is mostly used in 1∶10 000 scale mapping projects. POS data processing methods can be classified as PPP and DGPS. The paper compared exterior orientation calculated by those two methods(data from Shangnan projects), and analyzed accuracy of POS supported aerialtriangulation with GCPs by check points.Finally,the article make a conclusion that whether the exterior orientation calculated by PPP and DGPS can be used to 1∶10000 scale mapping.
2016-05-13
P231
B
1007-3000(2016)06-4