船舶到港时间可变的泊位—岸桥联合调度
2017-01-04韩晓龙
赵 虎,韩晓龙
(上海海事大学物流研究中心, 上海201306)
船舶到港时间可变的泊位—岸桥联合调度
赵 虎,韩晓龙
(上海海事大学物流研究中心, 上海201306)
为研究不同靠港计划对船舶燃油消耗和码头碳排放量的影响,分别建立了船舶到港时间可变(variable arrival time,VAT)和到港时间固定(constant arrival time,CAT)策略下的泊位—岸桥联合调度模型,以最小化船舶延迟离港时间、航行油耗和整个码头碳排放为目标进行多层次对比分析。研究结果表明:与CAT策略相比,VAT策略可以在同等或略微降低码头服务水平的前提下,大幅度减少船公司航行油耗和整个码头的碳排放。在目前节能减排的趋势下,采用VAT策略不但可以为船公司节省运输成本,还可以保护环境,低碳运营。
油耗;碳排放;船舶到港时间;泊位—岸桥调度
0 引 言
低碳、环保是港口航运业未来发展的趋势,如何有效减少船舶油耗和整个码头的碳排放对于船运公司和码头来说具有重大的现实意义。泊位和岸桥是集装箱码头最为核心的资源,其作业效率的高低不仅直接决定了码头的生产效率和成本收益,而且影响着整个港口的能耗和碳排放。因此,合理的泊位和岸桥调度方案对港口作业效率的提高和能耗控制尤为重要。
船舶的到港时间是港口制定泊位—岸桥分配计划的关键参数,根据船舶到港时间固定与否可以分为两种策略:
固定到达(constant arrival time,CAT)策略:集装箱码头作业计划中把每一艘船舶的到港时间看作已知常量,码头根据船舶的到达时间来安排泊位和岸桥调度。
到达可变(variable arrival time,VAT)策略:集装箱码头计划作业中把船舶的到港时间看作决策变量,码头和船公司信息共享、协同运营,船公司通过控制航行速度控制到港时间。
与传统的CAT策略不同,VAT策略将船舶的抵港时间看作决策变量,由于船舶的航行速度是可以调整的,其抵港时间可以位于一个区间内,分别由船舶的最快和最慢航行速度[1]决定,这样可以带来两点优势:船舶的抵港时间在一个范围内,将使模型的可行域扩大,船舶的延迟离港时间可能进一步减小;当港口拥挤、泊位短缺时,码头可以与船舶协调沟通,通过控制航行速度改变到港时间,这不仅可以缩短船舶的在港等待时间,减少船舶等待期间的碳排放,而且还可以减少船舶航行过程中的油耗和碳排放[2]。
文章将立足于绿色、低碳航运大背景[3],考虑港口作业效率、船舶航行油耗和整个港口碳排放量,在传统泊位—岸桥分配模型基础上,研究VAT策略下的泊位—岸桥调度问题。
1 文献综述
对于泊位—岸桥联合调度(BACP)问题,近些年来,国内外研究学者对此做了大量的研究。
Liang等[4]研究泊位和岸桥调度问题,以最小化岸桥工作时间、等待时间和延迟时间为目标函数,采用遗传算法结合启发式算法求解模型,得出靠泊位置、时间和分配给每艘船舶的岸桥数量。Birger等[5]在研究连续泊位和岸桥调度分配的基础上,考虑了对岸桥作业时间超长的惩罚、偏离最佳靠泊位置的惩罚和岸桥移动的惩罚,引入三种惩罚因子,同时加入了滚动时间窗思想和船舶优先级。李明伟等[6]以集卡运距和船舶在港时间最小为优化目标,建立了多目标离散泊位—岸桥分配模型,设计多目标函数的粒子历史极值和全局极值的计算方法,提出了基于混沌云粒子群优化算法求解多目标离散泊位—岸桥分配模型的新方法。Han等[7]以最小化船舶在港时间,建立了以最小化偏好泊位、岸桥移动次数以及岸桥数量为目标的泊位—岸桥联合调度模型,最后运用粒子群算法进行求解。
以上的泊位—岸桥调度研究通常把船舶的到港时间作为已知变量来考虑,建立的BACP模型大多数都以船舶在港费用最小、在港时间最短或整个码头运营费用最省为目标函数进行优化,而考虑船舶靠港期间产生的油耗和整个码头碳排放量的研究却很少。
Golias等[8]把船舶的到港时间看作决策变量进行泊位计划,通过最小化等待时间减少船舶的油耗和碳排放,但是相比于船舶驶入港口期间,文中考虑的等待时间产生的油耗和碳排放只是很小的一部分。Du等[9]在建立BAP模型时,同样把船舶的到港时间作为决策变量,量化分析了船舶航行驶入港口期间产生的油耗和碳排放,而且把燃油消耗率与航行速度之间的非线性关系转变为线性约束,但是没有考虑船舶偏好泊位带来的影响和装卸过程中岸桥产生油耗和碳排放。
目前,大多数把船舶的到港时间看作决策变量的研究没有系统考虑船舶的整个在港过程,只是单独考虑船舶航行期间或等待期间产生的油耗和碳排放,考虑整个码头碳排放研究的却很少。由此笔者提出最小化船舶延迟离港时间、航行油耗和整个港口碳排放量为目标的泊位—岸桥分配方案,并分别对VAT和CAT两种策略下的模型进行求解,分析对船运公司和码头的影响。
2 问题描述
泊位和岸桥调度[10]问题可以分为两个阶段:第一阶段根据船舶的到港信息,对船舶分配靠泊时间、靠泊位置;第二阶段根据码头岸桥和集卡的可调用情况,对靠泊船舶分配岸桥、集卡。泊位和岸桥的调度问题可用图1说明,图中每一个矩形代表一艘船舶,纵轴表示时间,横轴表示港口岸线,矩形的长、宽各表示船舶的长度和装卸时间,其中矩形框内的每个黑色小矩形块代表一个岸桥工时,例如船舶i在装卸作业的3个小时内,服务的岸桥个数分别是1、2、2。

图1 泊位—岸桥的分配示意图Fig.1 Distribution diagram of berth and quay crane
2.1 燃油消耗
由赵刚的《国际航运管理》[11]得知船舶航行燃油消耗量的计算公式,船舶从距离港口m处行驶至港口过程中的燃油消耗量F的表达式为:
(1)
式(1)中,r0为船舶的机能系数,r1为每天船舶航行的辅机燃油消耗量。由于船舶的到港时间a为变量,因此船舶航行期间的燃油消耗量可以通过调整到港时间a来优化。
2.2 码头碳排放
泊位—岸桥的调度分配对整个码头的碳排放量有着重大的影响,例如:船舶在港期间的等待时间、靠泊位置、岸桥的使用个数,装卸时间等都将对港口的空气质量产生不可忽视的影响。文章主要考虑以下三个方面:
①虽然船舶在航行时产生的碳排放相对于停泊时更多,但是后者相对来说更加敏感,因为船舶在停泊等待期间其辅机所产生的碳排放是港口空气污染物的主要来源之一。船舶等待期间产生的碳排放量[12]Q1用式(2)表示,船舶碳排放量计算所需的参数见表1。
Q1=POiLFEFiENi(Ei-ai),
(2)
式中,POi为等待期间所有船舶i发动机的额定功率;EFi为CO2的排放系数;LF为船舶i的负载率;ENi为船舶i的发动机数量;Ei-ai为船舶i发动机的持续时间。
表1 船舶碳排放
Tab.1 Carbon emission of ship

类别航行期间CO2排放系数/[g·(kw·fuel)-1]等待期间CO2排放系数/[g·(kw·h)-1]船舶3110683
②船舶靠泊时,一般希望停靠在特定的集装箱堆场附近,这个特定位置称之为偏好泊位。当码头实际分配泊位与偏离偏好泊位不一致时,就会导致集卡运距的增加。集卡运距的增加,必然产生额外的碳排放。文章把船舶偏离偏好泊位而产生的额外集卡运距作为集卡碳排放量[13]的来源,不考虑原有的集卡行驶距离。集卡行驶时产生的碳排放量Q2用式(3)表示,集卡碳排放量计算所需的参数见表2。
Q2=NCEOwi|Bi-bi|,
(3)
式(3),NC为集卡载重时每公里油耗;EO为CO2排放系数;wi为船舶i需要装卸的集装箱数量;|Bi-bi|为偏离泊好位置距离。
表2 集卡碳排放
Tab.2 Carbon emission of truck

类别每公里油耗/(L·km-1)CO2排放系数/(g·L-1)集卡122650
③岸桥作为集装箱码头不可或缺的资源,其装卸过程中产生的碳排放也是港口空气质量下降的主要因素。岸桥装卸时产生的碳排放量[14]Q3用式(4)表示,岸桥碳排放量计算所需的参数见表3。
(4)
式(4),ER为CO2排放系数;HK为岸桥单位时间操作能耗;Di-Ei为岸桥服务船舶i的时间;Yik为k时段服务船舶i的岸桥个数。
表3 岸桥碳排放
Tab.3 Carbon emission of quay crane

类别单位时间操作能耗/(kw·h-1)CO2排放系数/(g·kW-1)岸桥93110935
3 模型建立
根据港口的实际运营情况,文章提出了船舶到港时间可变的多目标泊位—岸桥联合调度模型,相关的集合和参数列举如下:
①集合和参数

②决策变量
船舶i的靠泊位置为Bi;船舶i的靠泊时间为Ei;船舶i的到港时间为ai;船舶i的离港时间为Di;在k时段分配给船舶i的岸桥数为Yik;当船舶i在时刻k被岸桥c服务,令uikc=1;否则uikc=0;当岸桥c在时刻k为船舶i服务时,令qikc=1;否则qikc=0;在时间序列上,当船舶i位于船舶j的左边,令δij=1;否则δij=0;在位置序列上,当船舶i位于船舶j的下边,令σij=1;否则σij=0;mi为泊位计划开始时,船舶i距离港口的距离。
3.1 VAT策略下的BACP模型
VAT策略下的BACP模型把船舶的到港时间作为决策变量而不是已知参数来处理,本文在VAT策略下考虑最小化船舶延迟离港时间、航行油耗和整个港口碳排放量对船运公司和码头影响,并用成本量化这三者的关系,把多目标问题转化为单目标进行求解。VAT策略下的BACP模型如下:
vat=minimize(βf1+αf2+χf3),
(5)
(6)
(7)
(8)
s.t.
Bi+li≤L, ∀i,
(9)
Ei≥ai, ∀i,
(10)
(11)
(12)
Bj-(Bi+li)-(σij-1)L≥0, ∀i≠j,
(13)
Ej-Di-(δij-1)T≥0, ∀i≠j,
(14)
σij+σji+δij+δji≥1, ∀i≠j,
(15)
σij+σji≤1, ∀i≠j,
(16)
δij+δji≤1, ∀i≠j,
(17)
uikck≥Ei+T(uikc-1), ∀i,k,c,
(18)
uikck≤Di-1+T(1-uikc), ∀i,k,c,
(19)
(20)
(21)
(22)
(23)
(24)
-1≤qik(c-1)+qik(c+1)-qikc≤1, ∀i,k,c,
(25)
(Di-di)+=max{Di-di,0}, ∀i,
(26)
uikc∈{0,1}, ∀i,k,c,
(27)
qikc∈{0,1}, ∀i,k,c,
(28)
σij,δij∈{0,1}, ∀i≠j,
(29)目标函数(5)表示最小化船舶延迟离港时间、航行油耗和码头碳排放总成本;目标函数(6)表示船舶延迟离港时间;目标函数(7)表示船舶油耗量;目标函数(8)表示码头碳排放量;约束条件式(9)保证所有的船舶停靠在码头岸线内;约束条件式(10)表示泊位时间大于到港时间;约束条件式(11)保证到港时间处于时间段范围之内;约束条件式(12)保证船舶在装载完之后才能离开;约束条件式(13)~(14)定义了船舶i的时间和位置序列;约束条件式(15)~(17)确保船舶之间在时间和空间序列中没有重叠;约束条件式(18)~(19)保证船舶i的服务时间在泊位时间与离港时间范围内;约束条件式(20)保证使用的岸桥数量在岸桥总数之内;约束条件式(21)保证任意时刻分配给船舶i的岸桥数在最大和最小岸桥数范围内;约束条件式(22)保证每个岸桥在一个时间段内只能为一艘船舶服务;约束条件式(23)表示分配给船舶的岸桥数等于具体分配给船舶的岸桥总数;约束条件式(24)表示船舶作业时间与船舶装卸量成正比,与岸桥的装卸速率成反比;约束条件式(25)表示岸桥在服务过程中只能在同一轨道上运动;约束条件式(26)定义了船舶延迟离港时间;约束条件式(27)~(29)定义了从属变量。
3.2 CAT策略下的BACP模型
与VAT策略不同,传统CAT策略下把船舶预计到港时间ei当作实际到港时间ai来处理。 CAT策略下的泊位—岸桥优化模型如下。
vat=minimize(βf1+αf2+χf3),
(30)
(31)
(32)
(33)
约束式(9),式(12)~式(29)得:
Ei≥ei, ∀i,
(34)
目标函数(30)~(33)同VAT策略下BACP模型中目标函数(5)~(8)表示的含义一样;约束条件式(34)表示泊位时间大于到港时间,替换掉VAT策略下BACP模型中原有的约束条件式(10)~(11),其他约束不变。
4 数据实验
使用宁波市某集装箱码头的实际数据进行数据实验,船舶资料以集装箱码头2011年7月11日的数据为基础,如表4所示。其港口长度1 600 m,岸桥个数为14台,岸桥的装卸速率为35 TEU/h,以一个小时为一个时间段,船舶的偏好位置是随机产生的。假定船舶的负载率LF为0.5,船舶的发动机数量EN为4,船舶的燃油价格α为4 000元/t,延迟离港的惩罚成本β为8 000元/h,碳排放的惩罚成本χ为250元/t。
表4 船舶到港数据
Tab.4 Data of Ships to port
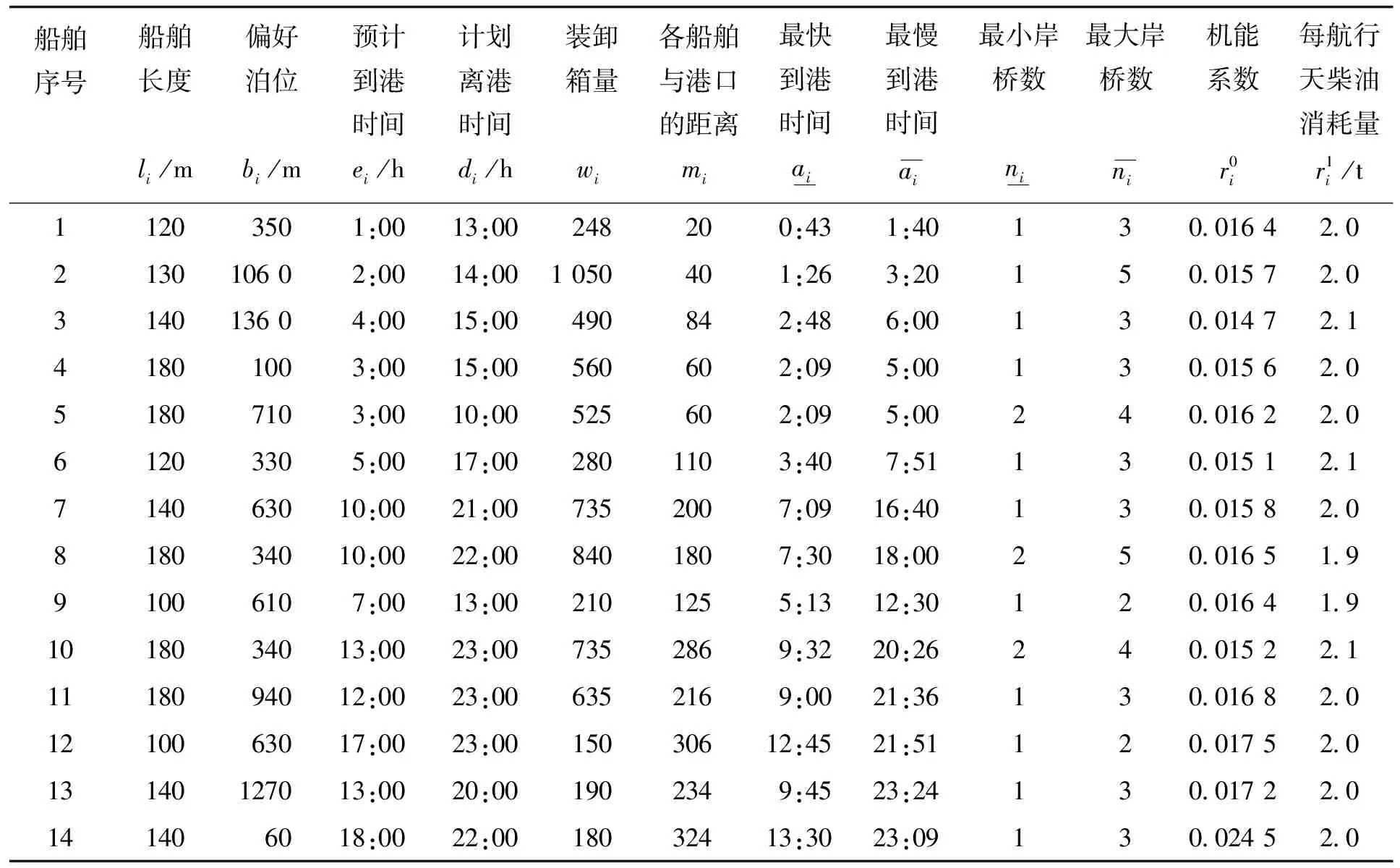
船舶序号船舶长度li/m偏好泊位bi/m预计到港时间ei/h计划离港时间di/h装卸箱量wi各船舶与港口的距离mi最快到港时间ai最慢到港时间ai最小岸桥数ni最大岸桥数ni机能系数r0i每航行天柴油消耗量r1i/t11203501:0013:00248200:431:40130016420213010602:0014:001050401:263:20150015720314013604:0015:00490842:486:0013001472141801003:0015:00560602:095:0013001562051807103:0010:00525602:095:0024001622061203305:0017:002801103:407:51130015121714063010:0021:007352007:0916:40130015820818034010:0022:008401807:3018:0025001651991006107:0013:002101255:1312:301200164191018034013:0023:007352869:3220:262400152211118094012:0023:006352169:0021:361300168201210063017:0023:0015030612:4521:5112001752013140127013:0020:001902349:4523:24130017220141406018:0022:0018032413:3023:09130024520
利用Lingo11[15],分别对两种不同策略BACP模型中量化后的成本目标函数进行求解,求解结果如表5。
表5 求解结果
Tab.5 Simulation result

目标值/万元CAT策略/万元VAT策略/万元(βf1+αf2+χf3)247730119470
从表5看到,相比CAT策略,VAT策略下船舶延迟离港、燃油消耗和码头碳排放总成本大幅度减少,大约降低了51.73%,这对于船公司和码头双方来说具有重要的经济价值和社会价值。此外,对lingo求解的数据进一步整理,分析每一个单目标的值,其结果如表6所示。
表6 仿真结果
Tab.6 Simulation result

目标值延迟离港时间f1/h油耗量f2/t码头碳排放量f3/tCAT策略6626042202985VAT策略10322764942464
从表6看到,船舶的延迟离港时间总体来看都比较小,在港口泊位计划中,大部分船舶的船期都可以得到保证。在两种不同策略的BACP调度计划中,油耗的变化率远远大于船舶延迟离港时间的变化率,也就是单目标函数f2的优化程度明显高于目标f1的被影响程度。同时,从表6还可看出,在牺牲少量的延迟离港时间下,就获得了超过5 t的码头碳排放量的减少,这对于码头的空气质量和环境保护具有重大的意义。
另外,为了验证VAT策略的有效性,文章还通过对不同到港船舶数量下的两种策略进行对比分析,其结果如表7所示。
表7 仿真结果
Tab.7 Simulation result

NCATVATf1/hf2/tf3/tf1/hf2/tf3/tfcat1-fvat1fcat2-fvat2fcat3-fvat34055071385022801287032270986010546177204332165206214128019984253807860223101212430710195316443135287126242676-0921902045912281440143468546189963016-26525018452146626402237091032276493236-37036373473
从表7数据看到,当到港船舶数量N较少的情况下,两种策略的船舶延迟离港间均为0,但相比CAT策略,VAT策略下的船舶油耗大幅度降低,码头碳排放量也较大幅度减少。由此分析可得:VAT策略可以在同等码头服务水平的前提下显著降低船舶在航行中的燃油消耗,同时对码头碳排放的减少也起到了一定的促进作用;随着到港船舶数量N的不断增加,VAT策略下码头碳排放和船舶的燃油消耗呈现递减趋势,但此时的船舶延迟离港时间略大于CAT策略,通过对比表7数据可以明显看出:虽然此时VAT策略不能达到全部最优,但燃油消耗减少量超过50%,码头碳排放减少量将近5 t,燃油优化产生的效益远远大于延迟船舶离港时间带来的影响。
由此本文可以得出结论:相比传统的CAT策略,VAT策略可以在同等或略微降低码头服务水平的前提下显著降低船舶在航行中的燃油消耗,有利于节约燃油成本,同时减少码头的碳排放,可以最大化码头和船公司的经济效益和社会效益。
5 结 语
研究了泊位—岸桥联合调度问题,把船舶到港时间作为决策变量来考虑,建立最小化延迟离港时间、燃油消耗和整个码头碳排放的BACP优化模型,并用成本量化这三者的关系,把多目标问题转化为单目标进行求解。从数值结果中可以看出:相比CAT策略,VAT策略下的优化模型尽管不能达到全部最优,但是可以在船舶离港时间做出较少牺牲的前提下,显著的降低船舶航行油耗和整个码头的碳排放量,在目前节能减排的趋势下,不但可以为船公司节省大量的燃油成本,还可以保护环境,低碳运营。总体来讲VAT策略对各方都有益,能获得更大的效益。但是,文章对于集卡产生的碳排放只考虑偏离泊位的额外运距部分,没有考虑集卡的整个行驶过程,此外,关于码头碳排放,文中没有考虑堆场起吊机对其产生的影响。在今后的研究中,可以把这些方面综合考虑,使之更加符合码头实际运营情况。
[1] ALVAREZ J F,LONGVA T,ENGEBRETHSEN E S.A methodology to assess vessel berthing and speed optimization policies[J]. MaritEconomLogist,2010,12(4):327-346.
[2] WANG Shuai-an,MENG Qiang, LIU Zhi-yuan.A note on “Berth allocation considering fuel consumption and vessel emissions”[J]. Transportation Research Part E,2013,49:48-54.
[3] KAVAKEB T T, NGUYE N, MCGINLEY K, et al.Green vehicle technology to enhance the performance of a European port: A simulation model with a cost-benefit approach[J]. Transportation Research Part C, 2015,60:169-188.
[4] LIANG Cheng-ji, HUANG You-fang, YANG Yang.A quay crane dynamic scheduling problem by hybrid evolutionary algorithm for berth allocation planning[J]. Computers & Industrial Engineering,2009, 56:1021-1028.
[5] BIRGER R W,DULLAERT R,SCHAEREN V.An enriched model for the integrated berth allocation and quay crane assignment problem[J]. Expert Systems with Applications,2011,38:14136-14147.
[6] 李明伟,康海贵.基于多目标混沌云粒子群算法的泊位—岸桥分配研究[J]. 水运工程,2014(1):90-96.
[7] HAN Xiao-long,GONG Xing. A new continuous berth allocation and quay crane assignment model in container terminal[J]. Computers & Industrial Engineering,2015,89:15-22.
[8] GOLIAS M M,SAHARIDIS G K,BOILE M,et al.The berth allocation problem:optimizing vessel arrival time[J]. MaritEconom Logist,2009,11(4):358-377.
[9] DU Y, CHEN Q, QUAN, X, et al. Berth allocation considering fuel consumption and vessel emissions[J]. Transportation Research Part E: Logistics and Transportation Review,2011,47(6),1021-1037.
[10]BIRGERRAA W,DULLAERT R,SCHAEREN V.An enriched model for the integrated berth allocation and quay crane assignment problem[J]. Expert Systems with Applications, 2011, 38:14136-14147.
[11]赵刚.国际航运管理[M]. 大连:大连海事大学出版社,2006:93-94.
[12]HU Qing-mi, HU Zhi-hua, DU Yu-quan.Berth and quay-crane allocation problem considering fuel consumption and emissions from vessels[J]. Computers & Industrial Engineering,2014,70:1-10.
[13]卢毅勤,杨斌,黄有方.兼顾碳排放量和效率的集卡调度多目标优化[J]. 计算机仿真,2015,32(6):386-389.
[14]王文渊,张颖超,唐国磊,等.港口集装箱装卸作业的碳排放量计算方法[J]. 港工技术,2013,50(4):6-10.
[15]罗罡辉,叶艳妹.多目标规划的 LINDO 求解方法[J]. 计算机运用与软件,2004,21(2) :108-110.
(责任编辑 梁碧芬)
Berth and quay cranescheduling based on variable arrival time of ship
ZHAO Hu, HAN Xiao-long
(Logistics Research Center, Shanghai Maritime University, Shanghai 201306,China)
In order to study the influence of different port plan on vessel fuel consumption and carbon emission of wharf, two models of berth and quay crane scheduling, with the strategy of variable arrival time (VAT) and the one of constant arrival time (CAT), are set up respectively.Multi-level comparative analysis of the models is made with the goals of minimizing delayed departure time of ship, fuel consumption and carbon emissions from the terminal. The research results show thatthe VAT strategy can significantly reduce fuel consumption and carbon emissions under the condition of equal or slightly lower terminal service level, compared to the CAT strategy. At present, under the trend of energy saving and emission reduction,adopting VAT strategy can not only save the cost of transportation for shipping company, but also protect the environment and operate in low-carbon mode.
fuel consumption; carbon emissions; the vessel arrival time to the port; berth allocation and quay crane assignment
2016-09-11;
2016-10-07
国家自然科学基金资助项目(71301101);上海市科委工程中心能力提升项目(14DZ2280200);上海市科委科研计划项目(14DZ2280200);上海海事大学研究生创新基金资助项目(YXR2016033)
韩晓龙(1978—),男,山东潍坊人,上海海事大学副教授;E-mail:superhxl@hotmail.com。
赵虎,韩晓龙.船舶到港时间可变的泊位—岸桥联合调度[J].广西大学学报(自然科学版),2016,41(6):1940-1948.
10.13624/j.cnki.issn.1001-7445.2016.1940
TP39; U691+.3
A
1001-7445(2016)06-1940-09
