智能泊车辅助系统(APA)研究
2016-12-24郭鑫韩延明白永程斌
郭鑫,韩延明,白永,程斌
(华晨汽车工程研究院电子工程室,辽宁 沈阳 110141)
智能泊车辅助系统(APA)研究
郭鑫,韩延明,白永,程斌
(华晨汽车工程研究院电子工程室,辽宁 沈阳 110141)
随着我国经济的快速增长以及汽车产业的蓬勃发展,城市中的机动化水平显著提高,机动车数量剧增,随之出现的一系列城市交通问题逐渐突出,其中“车位少,停车难”现象严重,因此关注城市停车问题,已经成为一项重要而紧急的工作。
APA;智能泊车;雷达;车位计算;泊车轨迹
10.16638/j.cnki.1671-7988.2016.01.010
In this paper, we study the advanced parking aid system which is through ultrasonic radar automatically detect the object around the vehicle, through digital signal processing and intelligent algorithm for calculating the length and width information of current parking space, and by automatically turn the steering wheel and HMI operation to adjust vehicle body angle, control vehicles are driven in accordance with the best parking track line, make the driver parking easily, safely, and fast.
This paper introduces the APA system architecture, system using conditions, and the calculation method of the parking space size and the parking track line, through the above content, completely introduce the APA system implementation scheme.
Keyswords:APA; parking, radar; parking space calculation; parking track line
CLC NO.:U463.6 Document Code:A Article ID:1671-7988(2016)01-28-04
前言
随着中国乃至全球机动车数量逐年增加,以及中国城市化高速发展,城市机动车拥有量与停车位数量的矛盾也逐渐显现,截止2013年底,中国已经有31个城市汽车保有量超过100万辆,城市私家车增长速度高达每年20%-30%,按照停车位数量的国际惯例,中国城市停车位缺口达到50%以上,通过减小停车位面积,在有限的空间里划分出更多的停车位就成了解决这个问题的主要手段,但驾驶者仍然要面对停车位规划不合理,行车道及停车位变窄等问题,泊车依然困难。本文研究的智能泊车辅助系统,可以协助驾驶者在狭窄地段顺利完成泊车操作,降低泊车刮碰的风险。
由于智能泊车辅助系统可以有效解决驾驶者当前遇到的泊车难题,改善静态交通状态,加大这方面技术的研究具有现实意义。本文研究的主要内容有:APA系统架构及原理、系统的使用环境及条件、车位面积算法和泊车入位等。
1、APA系统架构及原理
系统架构图如图1,主要包含的元件有:自动泊车控制器,倒车雷达,APA雷达,扬声器,系统开关,LED指示灯,显示设备。自动泊车控制器负责处理雷达侦测数据,计算障碍物距离,通过CAN总线与其他功能模块通信,获取相关数据,通过显示器与扬声器组成的人机界面指导驾驶者操作,本系统具备软件升级,程序烧入,诊断等功能。

图1 APA系统架构
1.1 雷达数据处理
本系统采用超声波雷达进行距离侦测,在雷达发射端,利用雷达内部陶瓷材料的物理特性进行电能和机械能的转换,将信号以超声波的形式向外发射,当遇到障碍物后,产生反射波,被雷达接收端获取,转换成电信号传送给控制器进行处理分析。超声波传感器测距示意图如图2,设定传感器到障碍物的距离为S。

其中v是超声波在空气中的传播速度,不是一个常数,在不同的温度下会产生最大约10%的误差,本文将v取值为340m/s,t为超声波在从发射端到接收端的时间差,S可以使用公式1计算出来。
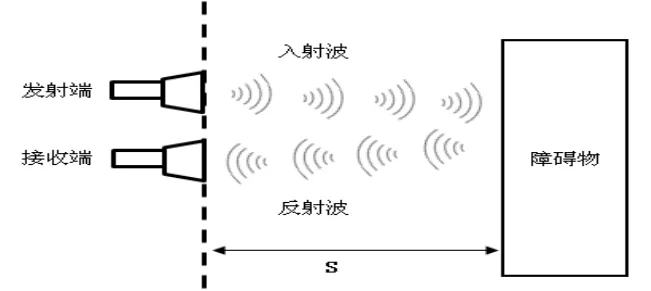
图2 传感器测距示意图
1.2 CAN总线通讯
系统通过CAN总线与其他连接到CAN总线的功能控制器通讯,获取计算车位面积和泊车轨迹的相关参数,如方向盘转角,档位,车速,车轮转动等信息,示意图如图3。

图3 CAN总线连接示意图
2、APA系统状态与工作条件
为满足APA系统操作逻辑与功能实现,APA系统分为四种状态,通过设定工作条件来区分不同的工作状态,满足工作条件后可以实现系统工作状态的互相转化,图4为系统工作状态转换示意图。APA的实现受较多条件约束,在满足条件的情况下系统才能正常工作,各状态限制条件如下:
系统关闭状态:1. IGN 关闭
系统禁止状态:1. IGN 开启
系统待机状态:
(1)非泊车档位
(2)搜寻车位时车速满足要求
(3)所有雷达功能正常
(4)系统通讯正常
系统激活状态:
APA开关开启
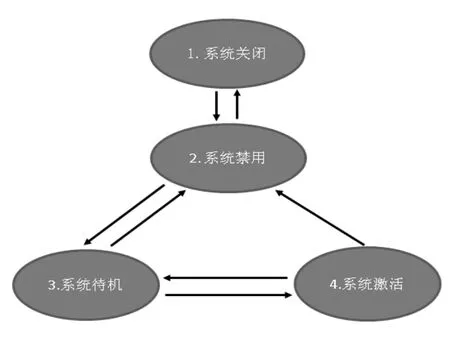
图4 系统工作状态转换示意图
系统关闭状态是指当IGN关闭时,APA系统不上电,处于关闭状态。
系统禁止状态是指当IGN开启后,档位、车速、雷达功能、系统通讯等条件中有一项不满足要求时,系统将禁止使用不能工作。
系统待机状态是指当工作条件满足后,系统进入待机状态,等待系统开关开启。
系统激活状态时指APA系统开关开启后,车辆开始自动搜寻车位指导驾驶员进行泊车。
3、车位侦测算法说明
当系统进入激活状态后,驾驶员将车辆沿着道路方向行驶,系统通过安装在车身上的超声波雷达自动进行车位侦测,根据超声波反射数据实时计算车位面积,当系统侦测到有合适的车位适合进行泊车后将指导驾驶员进行泊车入位。下面使用数学模型对车位侦测算法进行说明,本节内容只介绍算法,相关的测量和车辆行进距离等误差不在说明范围之内,这里以水平泊车模式,侦测车辆右方的车位为例。
定义车辆几何中心点为原点O,车辆前进方向为Y轴,车辆右方为X轴,坐标系如图5,当系统开始侦测车位,超声波雷达发出n个波形后:
车辆中心前进距离为:D(n)超声波雷达到障碍物的距离为:L(n)雷达传感器距离X轴和Y轴的距离分别为:d(x)d(y)探测点距坐标系Y轴的距离Sx(n)距X轴的距离Sy(n)可以由下列方程式表示:


图5 坐标系模型
雷达距离障碍物的距离可以用公式计算:

v是超声波传播速度为已知量,t(n)是第n个雷达波从发射到接受的时间,系统可以自动计算,车辆前进距离可以用公式计算:

V是当前实时车速,可以通过其它传感器读出,T是雷达发射超声波周期,由系统设置,将公式(3)和公式(4)带入到公式(2)中,可以计算出探测点位于坐标系下的位置,图6是计算后探测点的示意图:
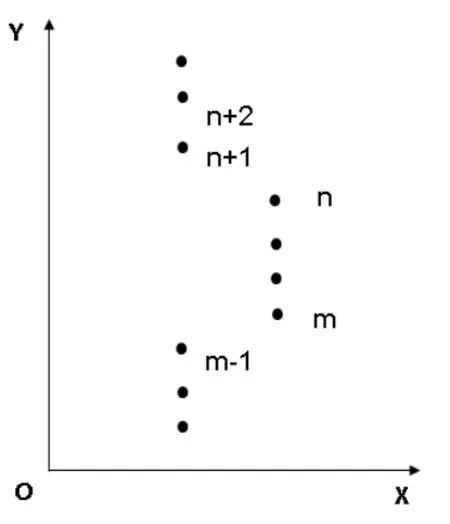
图6 探测点坐标模型

坐标系中的每一个探测点到X, Y轴的距离都可以用数学方程式计算出来,相邻两个探测点之间的X方向的距离△Sx和可以用下面的数学方程式表示:当系统侦测到△Sx的值满足泊车要求时,将继续计算△Sx的值在Y轴方向上持续的距离是否满足泊车要求,图6坐标模型中从m点到n点的△Sx都满足泊车时车位X方向的距离要求,系统将计算m, n点之间在Y方向上的距离△Sy是否符合要求:如果△Sy的距离也满足泊车要求,那么系统将把由m-1, m, n, n+1这四个点组成的区域认定为可以泊车的车位,从而进行自动泊车,如果△Sy的距离不满足泊车要求,那么系统将继续侦测,寻找下一个适合泊车的车位。

4、自动泊车入位
系统侦测到有合适的车位后,将会指导驾驶者进行泊车入位,此时驾驶者控制车速以及档位,APA系统接管方向盘,控制泊车方向,整个泊车环节主要可以分成三个部分:
第一部分是系统控制车辆从准备倒车的位置开始以转向角度θ进行倒车操作,直到车辆尾部接近车位,如图7所示:

图7 倒车示意图1
第二部分是APA系统反向调整转向角θ,将车辆从接近车位位置泊车入车位,如图8所示。
经过前两步操作,车辆基本已经处于目标车位内,第三部分是系统控制车辆在车位内前后行进,调整车身位置使其完全处于车位内部,并且保持车身水平。
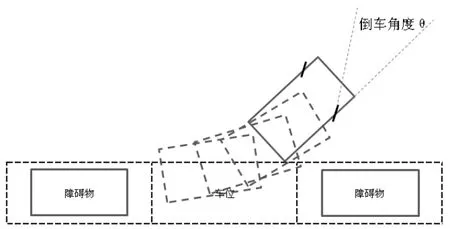
图8 倒车示意图2
5、智能泊车辅助系统发展趋势和研究方向
目前APA系统能够自动侦测车位,指导驾驶员泊车入位,适应多种泊车环境,已经在多款中高档车上应用,但仍然需要驾驶者控制车速和档位,无法实现全自动泊车,在智能化程度和算法误差上仍然需要提升改进,实现全自动泊车和完善算法误差将会是智能泊车辅助系统下一步的研究方向。
未来实现汽车自动驾驶将是全世界汽车行业的共同目标,智能泊车辅助系统作为自动驾驶的重要组成成员,具有广阔的发展空间和研究价值。
6、总结
本文主要介绍了APA系统的工作原理、系统架构、算法等基本内容,智能泊车辅助系统作为汽车智能化发展的代表功能,在今后的汽车发展中将会更好的改善驾驶舒适性和安全性,目前使用的智能泊车辅助系统还无法真正意义上实现自动化泊车,还有许多工作需要继续去做。
[1] 王雪梅,黄学欣. 城市静态交通问题的探讨[D].吉林:东北林业大学 黑龙家:哈尔滨工业大学.2004.
[2] 何峰.一种应用于智能泊车辅助系统的车位检测方法[J]. 传感器世界2009,第三期.
[3] 吴谐.智能泊车辅助系统研究[D]. 南京:南京理工大学.2008.

3、结论
某轿车是紧凑型轿车,立足国内市场,逐步推向国际市场。车门内饰板的设计开发,首先要满足法规要求和人机工程要求。其次结构设计上,在满足造型、性能及制造工艺要求的前提下,要尽量简单,分块做到最少,以减少模具的开发套数。既能响应公司的四化要求,又能降低开发成本。
参考文献
[1] 张志军.汽车内饰设计概论,[M]人民交通出版社.
[2] 曹渡.汽车内外饰设计与实战.[M]机械工业出版社.
[3] 技术中心设计指南.技术中心[M]主编.
Research on Advanced Parking Aid (APA)
Guo Xin, Han Yanming, Bai Yong, Cheng Bin
(Brilliance Automotive Engineering Research Institute, Liaoning Shenyang 110141)
With the rapid growth of China's economy and the vigorous development of the auto industry, urban motorizetion level increased significantly, in the motor vehicle to flourish, result in series of city traffic problem increasingly prominent, the phenomenon of "less parking spaces, parking hard" is serious, so pay close attention to urban parking problems, has become an important and urgent work.
U463.6
A
1671-7988(2016)01-28-04
郭鑫,就职于华晨汽车工程研究院电子工程室。
文章研究的智能泊车辅助系统(APA)是通过超声波雷达自动侦测车辆附近的障碍物,使用数字信号处理及智能算法获取当前停车位的长度和宽度信息,通过自动转动方向盘调节车身角度和人机界面操作控制车辆按照最佳的泊车轨迹行驶,使驾驶员轻松,安全,快速的完成泊车入位。
文章着重介绍APA系统架构、系统使用条件、车位大小计算方法,泊车轨迹等内容,阐述完整的APA系统实现方案。