基于MSP430F6638的数字象限仪设计
2016-12-20郑立评朱建杰张泽峰
王 巍, 郑立评, 朱建杰,张泽峰
(军械工程学院,河北 石家庄 050003)
基于MSP430F6638的数字象限仪设计
王 巍, 郑立评, 朱建杰,张泽峰
(军械工程学院,河北 石家庄 050003)
为实现火炮射角的数字化测量,设计了一种数字象限仪。以MSP430F6638单片机为处理器,与圆弧式光栅传感器组成倾角测量系统,给出了系统硬件电路设计方案,在分析光栅信号四倍细分原理的基础上,结合MSP430单片机的超低功耗特性,给出了系统软件程序设计方案。采用软件解码的方法完成光栅倾角信号的辨向、细分与计数运算,具有测量范围大、精度高、功耗低等特点。经试验验证,设计实现了0.25密位测量分辨力,能长期待机工作,适合野外作战环境下使用。
MSP430F6638;圆弧式光栅倾角传感器;数字象限仪
火炮射击精度是影响火炮威力发挥的重要因素。在火炮长期使用过程中,由于机械磨损等原因,造成火炮瞄准具示度与炮身实际射角不一致,影响火炮的射击命中率[1],为纠正此射角误差,目前部队普遍采用象限仪校准的方法,但存在操作不便、读数困难的问题。随着现代化战争的发展,武器装备不断改进升级,传统机械结构的象限仪已无法满足战场对装备保障信息化的需求[2]。为解决此问题,笔者应用单片机与传感器技术,设计了一种新型数字象限仪,实现了炮身射角测量数字化。
1 系统总体设计
数字象限仪由MSP430单片机系统与光栅传感器两部分组成,采用电池电源供电,并结合了键盘与LCD显示模块,系统结构如图1所示。光栅传感器输出光栅方波信号触发单片机端口产生中断,单片机端口在检测到电平变化后对光栅信号进行解码处理,结果通过LCD模块显示,键盘模块控制单片机信号检测功能关断。

2 系统硬件设计
2.1 MSP430F6638主板电路
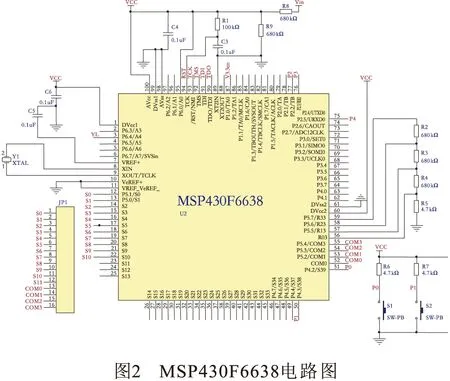
MSP430单片机是TI公司推出的16位超低功耗混合信号处理器,采用RISC指令集系统,并且内部集成硬件乘法器,运算速度快,处理能力强[3]。MSP430F6638是MSP430单片机系列中的高端处理器,CPU主频高达25 MHz,功能模块丰富,其中P1~ P4端口引脚具有跳变沿中断功能,可对光栅信号及键盘按键作出中断反应。设计以MSP430F6638的P4.0与P4.1引脚作为传感器信号的接收端, P4.2与P4.3引脚为键盘接口,LCD接至MSP430F6638内部LCD驱动模块的专用接口S0~S11,硬件电路如图2所示。
2.2 圆弧式光栅传感器
光栅传感器具有量程大,精度高的特点,适合线位移与角位移的测量。设计采用获国家发明专利的圆弧式光栅倾角传感器[4],其量程为-20°~90°,光栅盘刻线密度为6 000线/周,分辨率为1密位,结构如图3所示。

该传感器采用5 V工作电压,内置了放大整形与微分处理电路,输出为2路正交的高低电平方波信号,可直接与MSP430F6638单片机(P4.0与P4.1引脚)相接,有效避免了外界环境对信号的干扰。传感器每转过1个栅线,便发生1密位角度偏转,输出1个周期方波,根据光栅信号4倍细分原理,信号在1个周期方波内会发生4次电平变化,因此会触发单片机产生4次中断,每次中断识别0.25密位角度偏转。通过上述细分,数字象限仪的设计精度达到了0.25密位。
2.3 电源电路
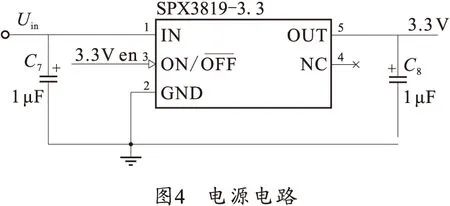
电源部分用选用聚合物锂离子电池,该型锂电池容量大,安全性能好,输出电压为5 V,可直接为光栅传感器供电,由于MSP430F6638的典型工作电压为3.3 V, 为保证正常工作,在电源电路部分选用SPX3819型电压转换芯片,该芯片具有低噪声低压差的特点,静态电流仅为90 μA,特别适合低功耗应用,可将输入电压降至3.3 V,电路连接如图4所示。
3 系统软件设计
MSP430F6638支持C语言开发,可移植性强,常用开发平台为IAR的Embedded Workspace集成开发环境,能够对MSP430程序进行编辑下载和在线调试。
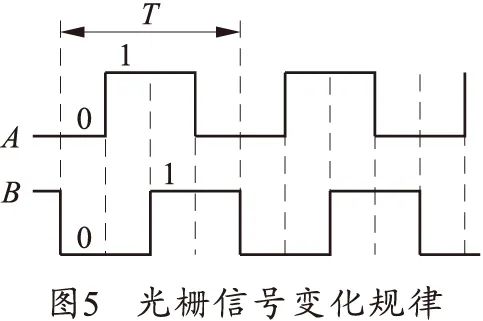
采用软件解码的方法处理光栅信号[5]。设传感器输出的2路正交方波信号分别为信号A和信号B,则信号具有如下特征:在1个信号周期内,信号A和信号B各自均有1个上升沿和下降沿变化,且4个跳变沿变化均相隔T/4周期,如图5所示。当光栅尺做正向运动时,信号A的上升沿及下降沿均比信号B超前T/4,两信号电平变化顺序为:(AB)00-10-11-01;当光栅尺做反向运动时,信号A的上升沿及下降沿均比信号B滞后T/4,两信号电平变化顺序为:(AB)00-01-11-10;当光栅尺运动方向发生改变时,两信号的电平状态跟着反向变化,如光栅尺正向运动半个周期再反向运动,若此时信号A为高电平,信号B为低电平,则两信号电平变化顺序为:(AB)00-10-10-00,对于其他情况下运动方向的改变,两信号同样具有与上述规律类似的反向变化顺序。根据以上电平变化规律,实现对光栅信号的软件4倍细分与辨向[6]。
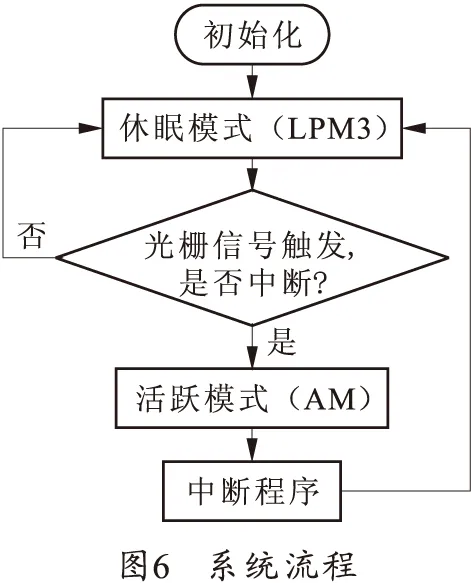
MSP430F6638具有超低功耗特性,可根据需要为片内不同模块合理配置时钟信号,为充分发挥其超低功耗优势,设计采用间歇方式工作。系统上电后首先进行初始化,然后进入休眠模式(LPM3),当光栅信号触发中断时,单片机被唤醒进入活跃模式(AM),执行中断程序对信号解码,中断结束后系统再次返回低功耗模式。软件程序由初始化程序和中断程序组成,流程如图6所示。
3.1 初始化程序
在初始化程序中,对各功能模块进行基本设置。上电后,首先关闭看门狗,配置时钟系统,查询信号接收端引脚电平状态,并设置相应的中断沿触发方式,配置键盘引脚,对LCD驱动模块进行初始化,打开定时器,开启总中断,单片机进入LPM3模式。
3.2 中断程序
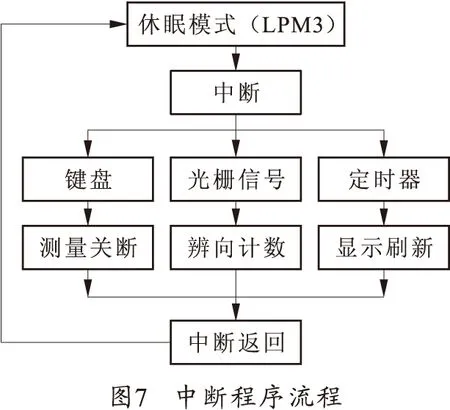
中断程序由3部分组成:键盘程序,信号处理程序和定时器显示程序。键盘连接单片机P4端口的P4.2与P4.3引脚,其中P4.2引脚控制光栅信号的中断使能,P4.3引脚控制光栅计数值清零,方便重新计数。信号处理程序对信号进行解码,即完成辨向与计数运算,当判断光栅为正向运动时,光栅计数值加1;当判断光栅为反向运动时,光栅计数值减1。定时器显示程序控制计数值在LCD上的显示,将显示程序放在定时器中断里,一方面节约了光栅信号处理时间,提高了解码速率;另一方面通过降低数值刷新频率,减小了CPU的计算量,一定程度上降低了系统功耗。中断程序流程如图7所示。
3.3 时序分析
Embedded Workspace集成开发环境具有在线仿真功能,对所编程序执行单步运行操作,通过时序分析,单片机CPU完成一次信号中断处理需40个指令周期,所需时间为
t0=N/fMCLK
(1)
式中:N为指令周期数; fMCLK为单片机CPU主频。
为使信号解码速率最高,处理时间最短,将系统主时钟信号 fMCLK调至最高25 MHz,代入式(1)得t0=1.6 μs。
由于单片机从LPM3模式切换到AM模式需时间t1=3 μs,故单片机所能处理方波信号的最小周期为
T=4×(t1+t0)=18.4 μs
(2)
即光栅信号最大解码频率为
f=1/T=54.35 kHz
(3)
4 试验验证
4.1 精度测试
根据程序仿真运行的计算结果,数字象限仪对光栅信号的最大响应频率约为54 kHz,由此可推算出最大光栅转角速度

(4)
实际操作中火炮的射角调节速度远小于这个数值,说明理论上数字象限仪的解码速率完全满足测量要求。为验证实际测量效果,将数字象限仪置于某型火炮上与传统象限仪进行对比试验,结果如表1所示。
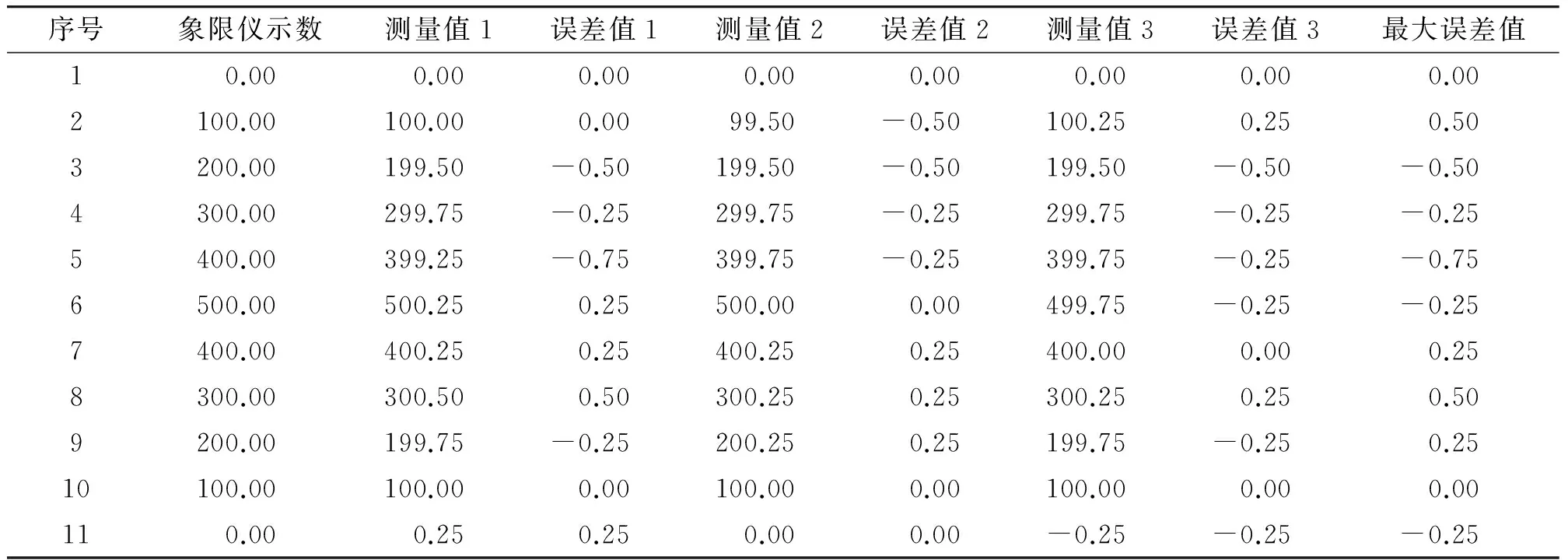
表1 试验结果对比 密位
由于最大误差绝对值平均值最能体现数字象限仪的精度,取各组最大误差数据的绝对值,计算其最大误差平均值为
(5)
试验结果表明,数字象限仪的测量值与传统象限仪示数基本一致,满足火炮检查的精度要求。对于存在的微小偏差,可能由以下因素引起:
1)传感器误差。由于传感器光栅栅线刻制不均匀,造成单片机CPU每次计数所对应角度发生变化,导致计算结果出现偏差。
2)身管晃动。火炮高低转动时,人为手动操作和机械结构等原因会造成转动过程中出现炮身晃动,由于光栅传感器抗振动性能相对较弱,炮身剧烈晃动将造成传感器内部结构出现微小偏差,导致光栅信号频率超过系统的解码速率,造成个别中断没有响应,出现丢数或者重复计数现象。
4.2 功耗测试
数字象限仪由单片机系统和光栅传感器组成,分别对其进行功耗测试,求出系统总功耗。
4.2.1 单片机系统功耗
随着近年来自动化、智能化理念在物流装备制造领域大行其道,越来越多的智能设备制造厂商开始不断涌现。面对着大有可为的市场环境和众多后来者的挑战,作为老牌智能装备制造企业代表的昆船智能会如何应对?我们来听听云南昆船智能装备有限公司董事长姜荣奇先生的卓见。
根据软件程序,单片机系统有2种工作状态:待机模式和测量模式。
待机模式即LPM3状态,单片机系统的功耗主要由单片机ILPM3、LCD显示ILCD和稳压元件部分IYJ产生,计算公式为
I1=ILPM3+ILCD+IYJ
(6)
MSP430F6638在LPM3状态下的耗电流为ILPM3=2.5 μA。采用直接测量的方法,将万用表接入单片机系统电源端,测得总电流I1=0.22 mA,则系统其他部分耗电流为
ILCD+IYJ=I1-ILPM3=217.5 μA
测量模式即信号检测与解码状态,单片机不断地在LPM3状态和AM状态之间切换,系统耗电流存在较大幅度变化,直接测量无法得到准确数据,采用求平均值的方法估算MSP430F6638的功耗[7],计算公式为
(7)
MSP430F6638在25 MHz主频下AM状态时的耗电流IAM=10 mA,取t1=3 μs,t2=1.6 μs,代入式(7)得单片机在最大信号解码速率下功耗为
则在测量状态时单片机系统的最大总功耗为
I2=IAVG+ILCD+IYJ≈3.70 mA
(8)
4.2.2 光栅传感器功耗
4.2.3 工作时间
由上述测量值,数字象限仪系统的总功耗为
ISUM=I2+I3=53.2 mA
若聚合物锂电池的容量W为2 A·h,在此功耗条件下,则一次可供数字象限仪工作的时间为
(9)
(10)
经试验测量与理论计算,数字象限仪系统可保持待机时间1年以上,持续测量工作时间近38 h,可满足野战条件下长期使用的要求。
5 结束语
基于MSP430F6638设计的数字象限仪硬件结构紧凑,可靠性强,超低功耗,无需外接电源,使用方便。对光栅信号的解码频率高,能够快速响应火炮射角变化,整个系统功耗极低,满足火炮标校的精度要求,可完全替代传统机械结构的象限仪,提高了装备信息化保障水平。
References)
[1]杨凤岗.用象限仪标定炮耳轴倾斜传感器的误差分析[J].火力与指挥控制,2008,33(4):124-127. YANG Fenggang. Error analysis of trunnion tilt sensor calibration using quadrant[J]. Fire Control and Command Control, 2008,33(4):124-127.(in Chinese)
[2]张振友,赵勇,杨歧子,等.基于MEMS加速度传感器的数字象限仪[J].兵工自动化,2009,28(3):56-61. ZHANG Zhenyou, ZHAO Yong, YANG Qizi,et al. Digital quadrant based on MEMS accelerometer[J].Ordance Industry Automation, 2009,28(3):56-61. (in Chinese)
[3]任保宏,徐科军.MSP430单片机原理与应用:MSP 430F5xx/6xx系列单片机入门、提高与开发[M]. 北京:电子工业出版社,2014. REN Baohong, XU Kejun.MSP430 MCU principle and application: MSP430F5xx/6xx series MCU learning improvement and development[M]. Beijing: Publishing House of Electronics Industry, 2014. (in Chinese)
[4]郑立评,尹国亮,闫文,等.圆弧式光栅倾角传感器及圆弧式光栅倾角测量仪: 中国,ZL201110032544.2[P].2011-08- 17. ZHENG Liping, YIN Guoliang, YAN Wen,et al. Arc-shaped grating inclination sensor and arc-shaped grating inclination measuring instrument:China,ZL201110032544.2 [P] . 2011-08-17. (in Chinese)
[5]刘中力. 光栅度盘测角仪中信号的辨向细分技术的研究[D].长春:长春理工大学,2009. LIU Zhongli. Research on dividing and sensing about optical grating signal in angle measure unit[D]. Changchun:Changchun University of Science and Technology,2009. (in Chinese)
[6]张永枫,杨中雨. 基于MSP430单片机计算法实现光栅细分[J]. 自动化技术与应用,2012,31(2):58-61. ZHANG Yongfeng, YANG Zhongyu. Grating subdivision based on MSP430 calculation method[J]. Techniques of Autimation and Applications, 2012,31(2):58-61. (in Chinese)
[7]谢楷,赵建. MSP430系列单片机系统工程设计与实践[M]. 北京:机械工业出版社,2009. XIE Kai, ZHAO Jian.MSP430 series MCU system program design and practice[M].Beijing: China Mechine Press, 2009. (in Chinese)
Digital Quadrant Design Based on MSP430F6638
WANG Wei, ZHENG Liping, ZHU Jianjie, ZHANG Zefeng
(Ordnance Engineering College, Shijiazhuang 050003, Hebei, China)
A kind of digital quadrant was designed to satisfy the request of fast aiming and accurate shooting with the system hardware circuit design of angle measuring system presented, which was composed of MSP430F6638 MCU and circular-arc type grating angle sensor. The system software design was presented on the basis of analyzing fourth subdivision principle of grating signal in combination with the ultra-low-power characteristic of MSP430 MCU. The software decoding method, which boasts qualities of wide measuring range and high precision and low power, was used to dispose of grating angle signal, accomplishing operation of discerning direction, subdivision and counting. Experimental results showed that the digital quadrant could achieve 0.25 mil measuring precision, stay on stand-by for long and fit in with field operation condition.
MSP430F6638; circular-arc grating angle sensor; digital quadrant
10.19323/j.issn.1673-6524.2016.04.017
2016-01-05
王巍(1993—),男,硕士研究生,主要从事单片机电子技术研究。E-mail:675654783@qq.com
TJ306
A
1673-6524(2016)04-0077-05
