基于线阵CCD枪弹位置图像处理的方法研究
2016-12-20杨博宇姚爱琴孙运强鲁旭涛
杨博宇,姚爱琴,孙运强,鲁旭涛
(中北大学 信息与通信工程学院,山西 太原 030051)
基于线阵CCD枪弹位置图像处理的方法研究
杨博宇,姚爱琴,孙运强,鲁旭涛
(中北大学 信息与通信工程学院,山西 太原 030051)
针对枪弹位置的线阵CCD测量图像信息处理问题,研究了线阵CCD在测量枪弹射击中枪弹的提取、噪声的剔除、枪弹中心的确定等问题。常用的背景差分算法在实际系统的运算过程中存在速度慢、噪声多等问题,根据线阵CCD测量系统采集到的枪弹图像信息的特点,提出了在背景差分法的基础上通过图像的一种改进的互相关性快速提取枪弹图像的算法,进而确定枪弹位置。通过比较该算法和背景差分法对枪弹图像的采集与处理,可以得出用该算法计算出的枪弹位置精确度高,耗时短,提高了线性CCD测量系统实时处理的效率,在连发的高精度自动报靶系统中具有一定的实用性。
线阵CCD; 枪弹位置; 高精度;图像处理
目前,以线阵CCD为传感器的各种非接触测量方法由于其智能化、自动化、驱动简单、易于处理等优点在工业检测领域得到了广泛的应用。线阵 CCD具有可以将一维像元数做多的优点 , 而总的像元数与面阵CCD相比较少,并且帧幅数高,像元尺寸灵活, 非常适合一维动态目标测量,因此在室内高精度立靶系统中应用广泛[1-2]。目前将线阵 CCD应用于室内高精度立靶测试系统,研究与分析基于线阵CCD的枪弹图像位置信息的处理算法,赵庆岚等在CCD实测数据恢复弹形的方法中提出了用帧相减和阈值提取有用数据的预处理方法提取枪弹[3];马卫红等在研究高精度CCD室内立靶系统中采用背景滤除算法提取枪弹位置[4]。这些都与背景差分法一样要求背景是较为均匀且不变的,这在实际的测量系统中很难达到。针对以上的不足,笔者提出了一种枪弹图像的快速提取方法,可以弥补背景差分法的不足,提高了测量系统的精确度和实时处理效率。
1 线阵CCD测量系统分析
线阵CCD采集到枪弹图像信息的位置可以推算出枪弹射击时在空间中的实际位置,而枪弹的尺寸又可在图像的像素数目中反映出来[5]。因为枪弹的边缘在图像中比较模糊,即与背景相比是变化相对剧烈的部分 ,所以如何精确地识别出枪弹的边缘直接关系到测量系统的精度问题 。为了研究枪弹图像的处理算法,需要对枪弹图像特点进行分析[6]。图1为测量系统结构图,图2为测量系统实物图。光源系统照射在CCD相机上形成光幕,当枪弹穿过光幕时,遮挡住了一部分光线,从而在线阵CCD相机上成像。线阵CCD相机接收到触发控制系统给的信号后瞬间拍照并保存数据,然后再进行目标位置信息的确定[7-8]。
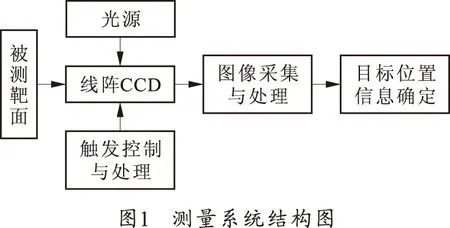

图3为线阵CCD采集到的图像,大小为1 000 pix×8 192 pix,由于枪弹体积小、飞行速度快,多数情况下线阵CCD拍到的枪弹在整幅图像中所占像素为25 pix×50 pix,仅占整幅图像的几万分之一。并且由于背景光源的均匀性和稳定性不理想导致图片的背景呈现出整体明暗交替变换剧烈而局部变化缓慢连续,使得弹丸完全淹没在背景中,给图像的后续处理带来了很大的困难。因此,寻找一种有效的图像提取方法是该项目的重点和难点。

2 枪弹图像的快速提取与处理
目前国内关于枪弹位置的提取与确定的研究基本上采用的都是背景差分法。背景差分法要求背景是均匀不变的,这样通过减背景能去除背景噪声,但是线阵CCD实际采集回来的枪弹图像的背景是变化的,尤其是在连发射击中,枪弹连续通过靶面其强大的冲击力会导致背景的变化,而且采集到的图像较大(1 000 pix×8 192 pix),直接用背景差分法提取枪弹中心会使得噪声增多影响结果的准确性且耗时较长。针对此不足,笔者提出了一种改进的互相关法和背景差分法相结合快速提取枪弹图像的方法,此方法分为枪弹图像预处理和枪弹图像处理两部分。
2.1 枪弹图像预处理
由图3可以看出线阵CCD采集到的图像比较大且背景复杂,很难在整幅图像中找到枪弹的位置,但仔细看就会发现这明暗相间的复杂背景中存在着一定的互相关性,笔者通过图像的互相关性来进行图像的预处理。
互相关函数为随机信号x(t)、y(t)在任意2个不同的时刻t1、t2下的值之间的相关程度[9]。在枪弹图像处理中,互相关函数的定义如下:
设两个函数分别为m(t)和n(t),其反映的是2个函数在不同相对位置上的相互匹配程度。则互相关函数定义为
R(u)=m(t)×n(-t)
(1)
首先将图片分成一个个50pix×128pix的小块作为研究对象,从图像的左上角按列开始把1个块作为1个待测图像,其后1个块作为对比图像,然后利用互相关函数把它们联系起来判断待测图像中是否存在枪弹。用数学的形式表示为:将待测图像与对比图像按列展开为二维像素矢量i和j,利用式(2)计算2幅图即2个矢量i和j的相互关系的相似性程度。
(2)
式中:k为待测图像; f表示对比图像;i和j表示图像的行和列。
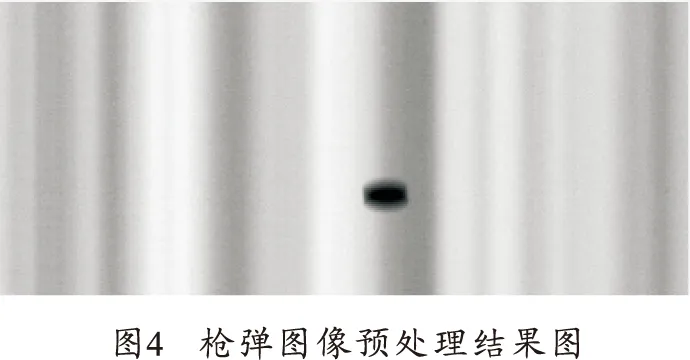
进行粗提取时,根据式(2)可以求出对应的ρ值,将其与阈值T1(采集1张没有枪弹的图像如上述算法分块,进行式(2)的计算,取最大的ρ为阈值)进行比较。如果小于阈值说明待测图像为有枪弹的图像,否则视为背景图像,把对比图像作为待测图像,其后1个小图像作为新的对比图像按上述算法进行计算,直到找到有枪弹待测图像。为了保证图像中枪弹的完整性,防止待测图像中只有部分的枪弹图像,所以截取待测图像及其周围的八联通区域(50 pix×128 pix×9)的小图像作为枪弹图像预处理结果图,如图4所示。
2.2 枪弹图像处理
枪弹图像处理是利用背景差分法将预处理结果图中的枪弹从复杂的背景中提取出来。具体算法如下:
1)枪弹图像的预处理结果图是通过截取八联通区域得到的,所以枪弹大致在图像的中间的位置,因此预处理结果图中的前N行是不含有枪弹的,将前N行相加求平均构造一个背景模板。
(3)

2)上面构建的单行背景模板大小为1 pix×384 pix,要将其进行多次合并扩建成大小为150 pix× 384 pix的无枪弹模板图l(i,j),再将枪弹图像预处理结果图g(i,j)和无枪弹模板图l(i,j)对应位置的像素按照式(4)做灰度值差分运算,差分后的灰度差值组成新的枪弹图像输出结果图,灰度差值为255的像素点,表明此像素点为枪弹图像中的背景部分,否则视为区别于背景的枪弹点。则枪弹图像输出结果图的运算公式为

(4)
3)将枪弹图像输出结果图h(i,j)进行中值滤波去掉剩余的少量噪声,得到如图5所示的枪弹图像处理结果图I(i,j)。

2.3 枪弹位置确定
在枪弹位置的确定中,灰度重心法可以根据图像的位置和灰度信息更准确地确定枪弹的位置,但同时噪声对其影响也很大,若图像中存在较大的噪声,所求出的重心就会偏向噪声一方。因此可以用此方法来验证笔者提出的快速提取法与传统的背景差分法相比结果,能更好地去除背景噪声的影响,快速精准地确定枪弹位置。
灰度重心法是以像素灰度值为权值的加权型重心法。重心的计算是对枪弹积分的过程:对每个枪弹像素求出它相对起始点的位置信息,再累加所有枪弹像素位置信息,最后求出所有枪弹像素灰度级的积分[10-11]。前者与后者的商即为要求的枪弹的重心位置。在图5所示的灰度图像I(i,j)中:
(5)
(6)
式中,W(i,j)为权值。
由于枪弹的灰度值低于背景的灰度值,W(i,j)取值为
(7)
式中,T2为迭代法求出的用于区分枪弹与背景的阈值。
3 试验与分析
试验采用了图1的测量系统,将线阵CCD采集到的3张不同枪弹位置的图像,分别用传统的背景差分法和笔者提出的快速提取法进行实时处理,然后与用灰度重心法求出的枪弹位置进行比较。为了清晰地看到图像的枪弹位置,表1中的枪弹原图和枪弹位置结果图仅截取了图片的枪弹部分。
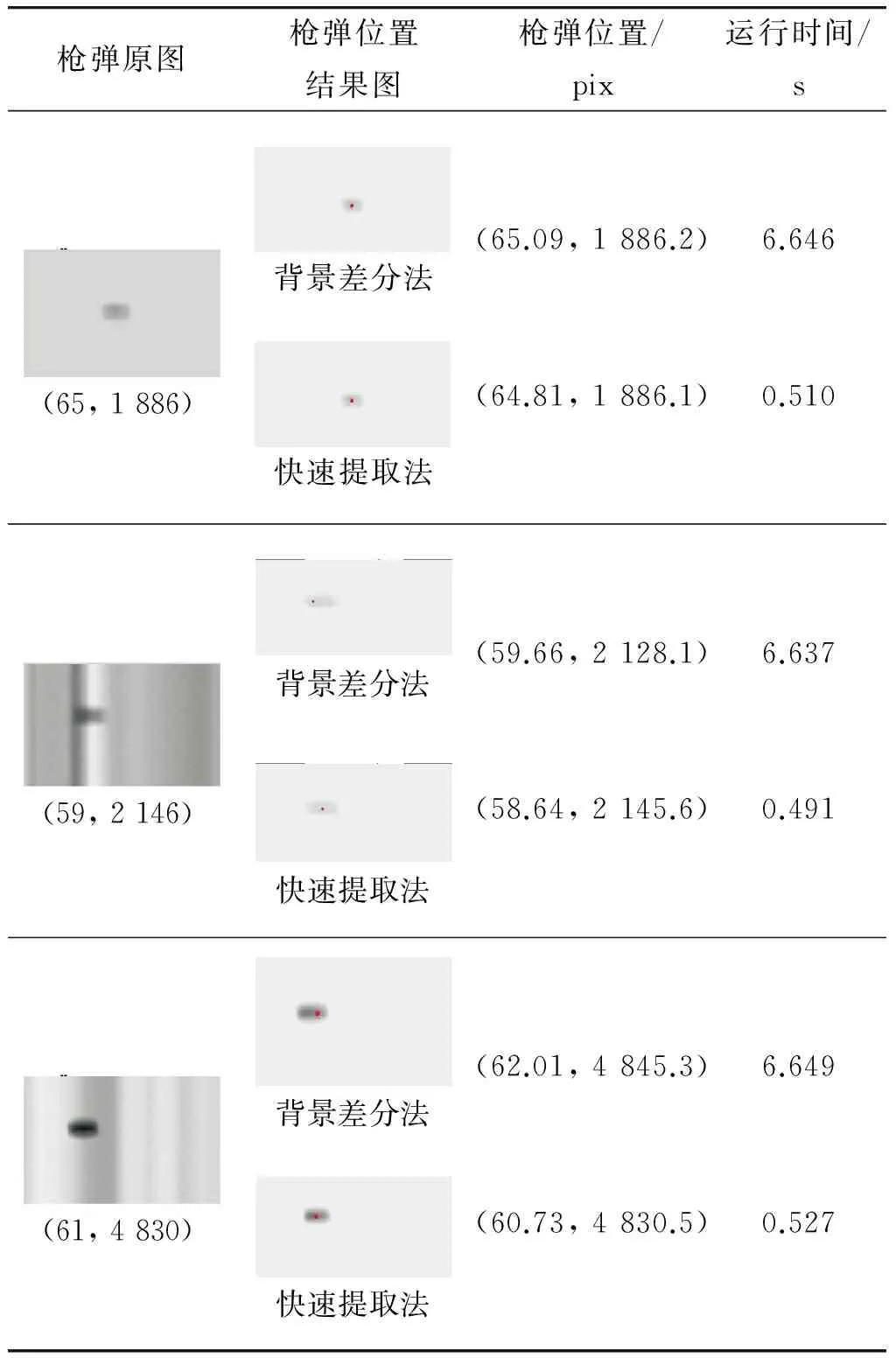
表1 比较两种方法确定枪弹位置
由表1中枪弹位置结果图和枪弹位置可以看出,背景差分法和笔者提出的快速提取法确定的枪弹的位置在不同背景下对所处行数影响不大,主要影响所处的列数。由枪弹原图可看出,当枪弹处在较为均匀且不变的背景中,2种方法所标注的枪弹中心基本上一致,计算出枪弹位置相差很小;当枪弹处在两明暗交替且发生轻微变化的背景中,从2种方法所标注的枪弹中心很明显可以看出,背景差分法提取枪弹时产生的噪声影响了枪弹所占列的位置确定,而对于快速提取法影响不大。由于在枪弹射击中,枪弹落在背景发生轻微变化的明暗条纹中的概率很大,所以笔者提出的快速提取法确定的枪弹位置更准确。在运算速度上,背景差分法的平均运行时间为 6.644 s,快速提取法的平均运行时间为0.509 s,本文的方法比背景差分法耗时明显减少,提高了实时处理的效率,解决了室内高精度报靶系统在连发射击中实时性报靶的运算问题。综上所述,快速提取法在运算速度和精确度方面都优于背景差分法。
4 结束语
笔者介绍了线阵 CCD 的测量系统,在常规背景差分法提取枪弹的基础上,提出了一种基于线阵 CCD 的枪弹位置图像处理的研究方法:先对图像进行互相关性预处理,再进行背景差分处理的弹丸快速提取,最后对提取后的枪弹图像进行位置的确定,消除了因图像背景复杂多变导致枪弹位置偏移造成的影响。这种方法受噪声的影响小,精确度高,很大程度上缩短了算法的运行时间,在连发的高精度自动报靶系统中具有一定的实用性。
References)
[1]王英,曾光宇.双线阵CCD交汇测量立靶精度系统研究[J].光电工程,2011,38(10):33-38. WANG Ying, ZENG Guangyu. Dual CCD intersection measurement precision of vertical target system research[J]. Photoelectric Engineering, 2011,38(10):33-38.(in Chinese)
[2]雷志勇,李翰山.线阵CCD测量高速弹丸图像信息处理研究[J].半导体光电,2009,30(5):751-754. LEI Zhiyong, LI Hanshan. Linear CCD measuring high-speed projectile image information processing research[J]. Semiconductor Optoelectronic, 2009,30(5):751-754. (in Chinese)
[3]赵庆岚,宋卫东,宋丕极,等.利用CCD实测数据恢复弹形的方法[J].传感器技术,2005,24(6):26-28. ZHAO Qinglan, SONG Weidong, SONG Piji,et al. The method of using CCD measurement data recovery bullet shape[J]. Journal of Transducer Technology, 2005, 24(6): 26-28. (in Chinese)
[4]马卫红,倪晋平,董涛,等.高精度CCD室内立靶测试系统设计[J].光学技术,2012(2): 180-184. MA Weihong, NI Jinping, DONG Tao, et al.High precision CCD indoor vertical target test system design[J]. Optical Technique, 2012(2): 180-184 . (in Chinese)
[5]董涛, 华灯鑫, 李言,等. 一种双目标同时着靶坐标测量方法[J]. 兵工学报, 2013, 34(10):1273-1278. DONG Tao,HUA Dengxin,LI Yan,et al.A double targets at the same time the target coordinate measuring method[J].Acta Armamentarii,2013,34(10): 1273-1278. (in Chinese)
[6]李翰山,雷志勇,袁朝辉,等.立靶光幕探测性能分析与弹丸信息提取研究[J].计算机测量与控制,2010,18(8): 1831-1833. LI Hanshan, LEI Zhiyong, YUAN Chaohui,et al. Vertical target screen detection performance analysis and the projectile information extraction research[J]. Computer Measurement & Control, 2010,18(8): 1831-1833. (in Chinese)
[7]刘晶晶.室内线阵CCD立靶测试系统中关键问题的研究[D].西安:西安工业大学, 2013. LIU Jingjing. Indoor linear CCD vertical target and the study of the key problems of the test system[D]. Xi’an: Xi’an Technological University,2013. (in Chinese)
[8]OHBO M, AKIYAMA I, TANAKA T. A new noise suppression method for high-definition CCD cameras[J]. IEEE Transactions on Consumer Electronics, 1989, 35(3):368-374.
[9]何丹,雷鸣.基于线阵CCD高速目标信号提取[J].机械与电子, 2013(2):27-29. HE Dan, LEI Ming.Based on the linear CCD high speed target signal extraction[J].Machinery & Electronics, 2013(2): 27-29. (in Chinese)
[10]余鸿铭,万敏,顾静良.数字信号处理器红外弱小目标搜索算法[J].强激光与粒子束,2012,24(8):1951- 1955. YU Hongming,WAN Min,GU Jingliang. Digital signal processor of infrared dim-small target search algorithm[J] High Power Laser and Particle Beams, 2012, 24(8): 1951-1955. (in Chinese)
[11]瞿仕波,周炎涛. 边缘检测法在线阵CCD中的应用[J].传感器与微系统,2013,32(8): 149-152. QU Shibo,ZHOU Yantao. The application of the edge test online CCD[J]. Transducer and Microsystem Technologies, 2013,32(8): 149-152. (in Chinese)
Methods of the Bullet Position Image Processing Based on Linear CCD
YANG Boyu, YAO Aiqin, SUN Yunqiang, LU Xutao
(School of Information and Communication Engineering, North University of China, Taiyuan 030051, Shanxi, China)
In response to the linear CCD image information processing problems, such issues are stu-died as the extraction of linear CCD bullets in the measurement of firings, the deletion of noise, the determination of bullet centers, etc. Problems existing in the actual system operation process of algorithms for background difference include slow speed and much noise. According to the characteristics of collected bullets image information through linear CCD measuring system, the cross-correlation rapid extraction of bullets image is to be presented through image on the basis of background subtraction, and then the center of the bullets position is to be determined. Through image acquisition and processing of bullets, a comparison is made of the algorithm and background subtraction. It is concluded that the algorithm can be used to calculate the bullets position with great accuracy and less time with the efficiency of real-time processing improved. In the continuous shooting high precision automatic target scoring system, it has certain practicability.
linear CCD; bullet position; high precision; image processing
10.19323/j.issn.1673-6524.2016.04.005
2016-03-22
杨博宇(1991—),女,硕士研究生,主要从事高精度立靶系统数字图像处理技术研究。E-mail:ybyqscx@163.com
TP751.1
A
1673-6524(2016)04-0020-05
