BDS/GPS双模定位技术在现代有轨电车中的应用研究
2016-12-16王迪陈光武杨厅
王迪,陈光武,杨厅
(1. 兰州交通大学 自动控制研究所,甘肃 兰州 730070;2. 甘肃省高原交通信息工程及控制重点实验室,甘肃 兰州 730070)
BDS/GPS双模定位技术在现代有轨电车中的应用研究
王迪1,2,陈光武1,2,杨厅1,2
(1. 兰州交通大学 自动控制研究所,甘肃 兰州 730070;2. 甘肃省高原交通信息工程及控制重点实验室,甘肃 兰州 730070)
实时定位监控系统是现代有轨电车运行控制系统的重要组成部分,它是确保现代有轨电车安全运行的关键系统。针对传统GPS定位存在的缺点,研究一种基于BDS/GPS双模定位技术的现代有轨电车高精度定位系统;提出一种以BDS/GPS双模定位为主,航迹推算/RFID定位为辅同时采用道路分段式的定位方案。为提高双模定位信息的精度,提出一种中值滤波和卡尔曼滤波相结合的数据处理算法。经过测试表明该方法比传统的现代有轨电车GPS定位系统更加准确、可靠,为现代有轨电车的安全运行提供了保障。
现代有轨电车;BDS/GPS双模定位;中值滤波;卡尔曼滤波
现代有轨电车作为一种重要的交通工具,为人们的出行提供了极大的方便,但其安全性也越来越多的受到人们的重视。目前现代有轨电车一般采用GPS、通信环线、轨道电路等进行实时定位。但其传统GPS定位系统的应用仍然存在较多问题,如定位精度低,对GPS的运行环境要求苛刻等[1]。同时,现代有轨电车在不同的路段对定位精度的要求也不同,例如对于道岔区段为保证其安全性需要较高的定位精度。本文从两个方面解决以上问题:1、在定位方案选择方面,考虑到城市中高楼建筑比较多,卫星信号容易受到干扰,因此在普通路段采用BDS/GPS定位,当PDOP值(卫星分布的空间几何强度因子)超过预定值时,采用DR(Dead Reckoning,航迹推算系统)进行辅助定位,在道岔区段为满足其高精度和安全性要求,采用BDS/GPS和RFID组合定位。2、在定位精度方面,考虑到BDS系统能够搜寻到足够的导航卫星来提供当地的定位服务,且BDS与GPS以及其他GNSS系统具有很好的兼容性[2]。因此采用BDS和GPS双模定位技术,可以充分利用两套卫星定位系统的长处和卫星资源,同时也可以互相验证。此外,为进一步提高卫星定位的精度,提出一种中值滤波和卡尔曼滤波组合算法,它能够很好地提高定位精度,减少定位误差。
1 定位方案设计
定位系统是现代有轨电车控制系统的重要组成部分,可实现现代有轨电车道路行驶跟踪、道岔区段占用检测,以提高行车效率。因此对于现代有轨电车在不同的路段有着不同的定位需求。虽然采用的GPS/BDS双模定位技术对定位精度、可靠性有很大提高,但由于现代有轨电车在运行中卫星信号的传输和接收很容易被地形、地物遮挡,这会降低定位精度,存在定位盲区[3]。因此单独的卫星定位难以保障定位信息的可靠性。

1.1 BDS/GPS与航迹推算组合定位
当BDS/GPS双模定位卫星信号存在盲区时,就必须采用另外一种辅助定位系统。考虑到与现代有轨电车车载设备的兼容性,采用航迹推算进行辅助定位[4],这样可以利用原有设备中里程计输出的信息进行航迹推算,以解决盲区定位问题。
DR航迹推算是一种利用某一点的位置坐标、速度以及行驶时间来推算出下一时刻位置信息的定位方法。其定位精度不会受到如电磁干扰、遮挡等外界因素的影响。但是,航迹推算系统不具有长期的稳定性,必须每隔一段时间进行误差校正[5]。对于现代有轨电车定位系统采用以BDS/GPS双模定位为主,同时实现对航迹推算信息进行误差校正。通过系统对卫星PDOP当前值的判断来确定定位是否存在盲区。当进入定位盲区时,系统会自动记录前一时刻卫星输出的定位经度、纬度、速度、航向角等信息,同时开始记录里程计输出的速度、时间等信息,通过航迹推算便可以得到盲区的定位信息,具体流程如图1所示。
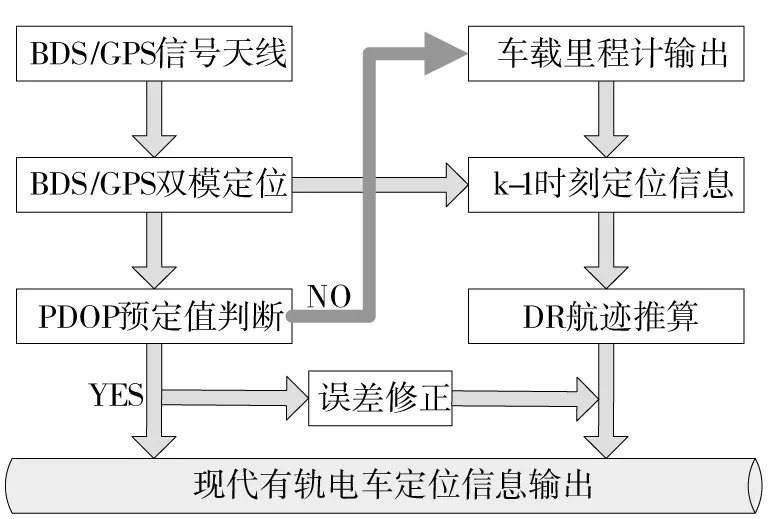
图1 BDS/GPS与航迹推算组合定位框图Fig.1 BDS/GPS and dead reckoning positioning block diagram
1.2 BDS/GPS与RFID组合定位
RFID(Radio Frequency Identification,射频识别)是近年伴随着无线电技术和大规模集成电路的普及应用而出现的一项先进的自主识别和数据采集技术[6]。由于其安装简单、操作方便、价格便宜等优点被广泛应用于各种领域。为解决现代有轨电车在道岔路段的高精度定位问题,在原有BDS/GPS双模高精度定位的基础上采用RFID技术作为辅助定位,其组合定位框图如图2所示。

图2 BDS/GPS与RFID组合定位框图Fig.2 BDS/GPS and RFID positioning block diagram
1.3 定位方案综合应用
依据以上定位方法的优点设计出现代有轨电车的分段组合定位方案。如图3所示。

图3 分段组合定位方案框图Fig.3 Piecewise combination orientation program block diagram
现代有轨电车进入道岔区段之前采用BDS/GPS与航迹推算组合定位,其中以BDS/GPS定位为主;当检测到道岔区段前的RFID标签后系统自动切换到BDS/GPS与RFID组合定位,同时信号机红灯点亮,此时通过这种组合定位方案可以检测到电车在道岔区段中的占用情况,从而实现精准定位,而且免去了轨道电路等地面设备的安装,当电车驶出道岔区段后自动切换为原来的定位模式。
2 现代有轨电车定位精度分析
通过以上方案可知,BDS/GPS双模定位的定位精度尤其重要,不管在普通路段还是道岔区段,BDS/GPS双模定位都起着非常重要的作用。对现代有轨电车采用BDS/GPS双模技术定位,首先应当建立起对应的系统状态方程。为充分利用BDS/GPS的测量信息,提高定位精度,本系统模型建立主要采用经度、纬度、速度、方位角等信息作为输入量。
2.1 运动模型
由于现代有轨电车是在地面上行驶,因此其运动可以近似看作是在二维平面(x,y)上的运动,据此建立定位模型,当现代有轨电车在二维平面中运动时,由BDS/GPS可以测出其在A点的初始位置A(x0,y0)、初始速度v0和初始的方位角θ0,当现代有轨电车由A点行驶到B点时,一方面BDS/GPS可以测出此时点B(x0,y0)的位置,另一方面,还可以由A点的位置经式(1)航迹推算得出B点的位置,两个数据经过相互修正得到此时现代有轨电车的位置。这样就弥补了在BDS/GPS信号丢失情况下无法定位的缺点。
(1)
2.2 定位状态系统模型
按照以上原理以及基本的几何关系,建立起现代有轨电车定位系统状态方程,如公式(2)所示:

(2)
3 高精度数据处理算法
针对现代有轨电车BDS/GPS双模定位技术,提出了一种新型的中值滤波与卡尔曼滤波组合算法。它利用中值滤波算法去除信号椒盐噪声,利用卡尔曼滤波算法使信号变得更加平滑,从而使其最终输出的BDS/GPS定位信息精度更高。
3.1 中值滤波算法处理定位数据
中值滤波是基于排序统计理论的一种能有效抑制噪声的非线性信号处理技术,基本原理是把数字图像或数字序列中一点的值用该点一个邻域中各点值的中值代替,从而消除孤立的噪声点[8]。设滤波窗口长度为n=2k+1或n=2k,观测值个数为N,滤波输出为U(t1),U(t2),……U(tN)。当窗口在观测序列上移动时,标准中值滤波方法输出为。
(3)
将以上方法用于处理BDS/GPS定位输出数据。现以经度数据处理为例,通过BDS/GPS双模定位模块在一定环境下进行连续采样,采样时间为75s,采样频率为1Hz。然后对经度数据进行中值滤波处理,其中滤波窗口设置为11(可根据实际需要设定窗口长度)。原始数据与处理后的数据曲线如图4所示。从图中可以明显看出处理后的数据曲线更加平缓,因此中值滤波器对定位数据的平滑脉冲噪声非常有效而且去除了定位数据中的椒盐噪声。

图4 经度值和经度滤波值Fig.4 Longitude values and longitude filtering value
3.2 卡尔曼滤波定位数据处理
卡尔曼滤波是一种递推线性最小方差估计技术,它采用递推估计计算出连续测量数据,近几年来基于卡尔曼滤波器的定位技术已经变得非常成熟[10]。基于(1)和(2)的系统模型可以利用标准的卡尔曼滤波来估计现代有轨电车的定位测量数据。其中离散化之后的状态方程和观测方程可化简为:

(3)

(4)
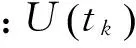
通过以上分析可以得出整个BDS/GPS定位数据的处理分析框图,如图5所示。首先是通过信息接收处理模块,分别对GPS信号和BDS信号进行前置放大、A/D转换以及多通道相关器,此时便得到初始的定位数据,如经度、纬度、速度、方位角[12]。接着中值滤波和卡尔曼滤波组合算法对定位数据进行处理,首先是通过中值滤波去除各个信号中的椒盐噪声,然后将数据输入卡尔曼滤波器对其进行再处理。图5中的BDS/GPS数据滤波算法处理模块的输出数据即为系统处理之后的估计数据,通过这些数据进行简单处理就可以实现对现代有轨电车的实时定位。
图5 BDS/GPS数据处理分析框图Fig.5 BDS/GPS data processing analysis diagram
4 测试实验与结果
为了验证本文设计方案的可行性,通过ATGM332D(BDS/GPS双模定位模块)接收数据来进行测试,通过百度地图进行定位路线显示,并使用MATLAB进行数据的处理和分析。通过定位终端测量原始定位数据,然后将数据发送到软件终端进行百度地图路线显示,如图6所示。

图6 BDS/GPS双模定位百度地图显示路线Fig.6 BDS/GPS dual-mode positioning baidu map shows route
由于百度地图的放大能力有限不能进一步看出定位的真实误差,为证明滤波算法的优越性,对定位数据进行坐标处理,并绘制二维的坐标路线图。如图7所示,图中虚线为BDS/GPS双模定位的原始测量值,实线为经过中值滤波和卡尔曼滤波之后的估计值,真实曲线为圆圈表示,从图中可以明显地看出经过处理后,定位数据的定位精度得到了很大提高。

图7 滤波算法处理前后定位路线比较Fig.7 Filtering algorithm positioning line comparison before and after processing
5 结论
1)BDS/GPS双模定位技术在现代有轨电车中的应用研究,提出的分段式组合定位方案很好地解决了卫星定位存在盲区和可靠性差的问题,同时又能够满足不同路段的不同定位需求。
2)为最大地发挥出双模定位的优势,采用了一种新型的组合定位算法,经过测试,该算法使得双模定位精度和可靠性有了很大的提高。
3)以上研究应用表明,本系统可作为现代有轨电车的一种新型的定位方案。相信随着我国北斗卫星导航系统的发展与普及,BDS/GPS双模定位技术能在现代有轨电车中发挥出更加优越的性能。
[1] Sun Q, Liu L. Application of COMPASS/GPS dual-mode differential positioning technology in the Qinghai-Tibet line[C]//Signal Processing (ICSP), 2012 IEEE 11th International Conference on. IEEE, 2012, 3: 2327-2330.
[2] Liu J, Cai B, Wang J. An analysis of BeiDou Navigation Satellite System (BDS) based positioning for train collision early warning[C]//Intelligent Vehicles Symposium (IV), 2013 IEEE. IEEE, 2013: 1065-1070.
[3] 李鸿旭,喻智宏,刘圣革.现代有轨电车智能控制系统中的车辆定位技术方案[J].都市快轨交通, 2013 (6): 160-162. LI Hongxu,YU Zhihong,LIU Shengge. Modern tram vehicle positioning technology of intelligent control system[J].Urban Rapid Rail Transit,2013 (6): 160-162.
[4] 林俊亭, 王晓明, 党篧, 等.城市轨道交通列车碰撞防护系统设计与研究[J]. 铁道科学与工程学报, 2015 ,12(2):407-413. LIN Junting,WANG Xiaoming,DANG Zhuo,et al. Study and design of urban rail transit train collision protection system [J]. Journal of Railway Science and Engineering, 2015 ,12(2):407-413.
[5] 吉翠萍,雷宏杰,冯培德.捷联惯性/里程仪组合定位定向系统方案设计及仿真计算[J]. 弹箭与制导学报, 2008, 28(4): 55-58. JI Cuiping, LEI Hongjie, FENG Peide. Strapdown inertial/mileage meter and position orientation system design and the simulation calculation[J]. Arrows and Guidance, 2008, 28(4): 55-58.
[6] 朱琎,杨剑锋,周宇.SAW RFID 技术在列车定位与跟踪中的应用[J].铁道标准设计,2012 (9): 102-105. ZHU Jin,YANG Jianfeng, ZHOU Yu. SAW the RFID technology in the application of train locating and tracking[J]. Railway Standard Design,2012 (9): 102-105.
[7] Kim D J, Kim M K, Lee K S, et al. Localization system of autonomous vehicle via Kalman filtering[C]//Control, Automation and Systems (ICCAS), 2011 11th International Conference on. IEEE, 2011: 934-937.
[8] Nodes T, Gallagher Jr N. Median filters: some modifications and their properties[J]. IEEE Transactions on Acoustics Speech and Signal Processing, 1982: 739-746.
[9] Ranka S, Sahni S. Efficient serial and parallel algorithms for median filtering[J]. IEEE Transactions on Signal Processing, 1991, 39(6): 1462-1466.
[10] Albrecht T, Luddecke K, Zimmermann J. A precise and reliable train positioning system and its use for automation of train operation[C]//Intelligent Rail Transportation (ICIRT), 2013 IEEE International Conference on. IEEE, 2013: 134-139.
[11] Reina G, Vargas A, Nagatani K, et al. Adaptive kalman filtering for gps-based mobile robot localization[C]//Safety, Security and Rescue Robotics, 2007. SSRR 2007. IEEE International Workshop on. IEEE, 2007: 1-6.
[12] 李浩, 吴祖海. GPS高程异常拟合粗差剔除以及精度评价方法研究[J]. 铁道科学与工程学报, 2015, 12(1):101-107. LI Hao, WU Zuhai. Eliminate and precision of GPS height anomaly fitting gross error evaluation method research [J]. Journal of railway science and engineering, 2015, 12 (1):101-107.
Application researth on BDS/GPS dual-mode positioning technology for modern streetcar
WANG Di1,2,CHEN Guangwu1,2,YANG Ting1,2
(1. Automatic Control Institute,Lanzhou Jiaotong University,Lanzhou 730070,China;2. Gansu Provincial Key Laboratory of Traffic Information Engineering and Control,Lanzhou 730070,China)
Real-time positioning and monitoring system is an essential component of modern tram operation control system, which is a vital system to ensure operating safety of modern tram. In view of the shortcomings of traditional GPS positioning, a high precision positioning system of modern tram based on BDS/GPS dual mode positioning technology was studied. A new positioning scheme that is depent on BDS/GPS dual mode positioning mainly, RFID/DR secondarily in different track section was put forward in this paper. Additionally, a combination of median filtering and Kalman filtering algorithm was proposed to improve the accuracy of dual mode positioning information. The result proves that the proposed method is more accurate and reliable than the traditional GPS positioning system, and can ensure the safe operation of modern tram.
modern tram; BDS/GPS dual mode positing; median filter; Kalman filter
2015-12-22
甘肃省基础研究创新群体计划(160RJIA327);兰州交通大学青年科学基金项目(2015035,2016024)
陈光武(1976-),男,新疆阿克苏市人,教授,博士,从事交通信息及控制研究;E-mail:cgwyjh1976@126.com
TP873
A
1672-7029(2016)11-2270-06
