基于嗅觉的水下机器人化学羽状物追踪定位方法
2016-12-01邓薇韩端锋纠海峰
邓薇, 韩端锋, 纠海峰
(哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001)
基于嗅觉的水下机器人化学羽状物追踪定位方法
邓薇, 韩端锋, 纠海峰
(哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001)
针对真实水流环境下的水下机器人化学羽状物追踪问题,参考生物嗅觉定位原理,提出化学羽状物源头概率分布地图的绘制算法和水下机器人搜索羽状物源头的路径规划策略,提高了机器人搜索羽状物源头的效率以及准确性。化学羽状物在流场中释放后,水下机器人采集在搜索区域内探测到的流场和羽状物的信息,利用贝叶斯理论描述出羽状物在空间和时间上的变化,绘制出羽状物源头概率分布地图,通过人工势场法规划出一个最优的搜索轨迹,达到羽状物探测概率的最大化,水下机器人能够沿规划路径跟踪羽状物直到发现羽状物源头。通过真实水流环境下进行的机器人追踪实验结果验证了该规划策略的可行性。
水下机器人; 嗅觉定位; 羽状物跟踪; 贝叶斯理论; 人工势场
0 引 言
嗅觉是一种远距离的感知行为,其被动物广泛用于觅食和生殖活动[1-3],如太平洋大马哈鱼靠嗅觉返回栖息地[4],南极海鸟靠嗅觉觅食[5],某些昆虫靠嗅觉交配和觅食[6-8]。在自然界中嗅觉对于大部分动物来说都起着至关重要的作用。例如搜索食物和巢穴这样的目标时,动物的嗅觉线索比视觉和听觉线索会更为有效[9]。虽然气味的探测比视觉或听觉的探测更简单,但是如何利用嗅觉线索来搜寻某一特定目标仍然是一个难题[10]。因此,至今这种强而有效的基础感觉系统很少应用在机器人上。
随着机器人技术、传感器技术、人工智能等领域取得的巨大发展,主动嗅觉技术得到越来越多学者的关注,即通过使用化学传感器的移动机器人来主动地发现、跟踪并确定气味/气体源头的技术称为主动嗅觉。无论是在民用、军用还是反恐领域都拥有巨大应用前景。如利用机器人检测有害化学物质的泄漏,锁定未爆炸的水雷和炸弹,在灾难现场搜救被困人员,以及在火灾场所探测火源等等[11]。此外嗅觉机器人甚至可以替代执行某些需要人和具有高度发达嗅觉的动物(如狗)合作才能完成的任务。
Hayes[12]等将主动嗅觉描述为如何使用移动机器人在二维环境下进行气味搜寻的问题,并将整个搜寻任务分为3种行为,即烟羽发现(Plume finding)、烟羽横越(Plume traversal)和气味源确认(Odor source declaration)。后来Li[13]等人又将整个搜寻任务详细划分为4种行为方式:烟羽发现(Plume finding)、烟羽跟踪(Tracing the plume)、烟羽再发现(Reacquiring the plume)和气味源确认(Odor source declaration)。烟羽发现就是在搜索任务刚开始阶段使用的行为方式,促使机器人能够尽快发现烟羽。烟羽横越或者烟羽跟踪都是在已经发现烟羽信息之后才进行的行为,这样机器人可以更加高效、快速地接近气味源头。由于环境中流场的不断变化,机器人在跟踪过程中也可能出现丢失烟羽无法继续进行跟踪的情况,需要借助一些已知的烟羽信息对丢失的烟羽进行再次发现并跟踪,称为烟羽再发现行为。气味源确认行为是机器人判断自己是否已经达到气味源头并确认源头位置的行为。
九十年代初,机器人嗅觉定位技术的研究逐渐成为各国研究人员研究的热点。目前的研究方法主要分为两大类:一类是基于仿生学原理的追踪定位方法。人类效仿自然界中某些生物利用发达嗅觉来搜索气味源头的追踪策略,开发出了基于仿生学原理的嗅觉定位方法。另一类嗅觉定位技术是基于工程理论(信息论、概率模型、流体力学模型等)的追踪定位方法。该类方法主要是把常见机器人领域内的工程方法应用于机器人嗅觉追踪定位研究上,开发出区别于仿生学原理的嗅觉追踪定位技术。基于工程理论的方法能够最大限度地利用传感器和计算机资源,这是仿生学方法所不具备的,也具有更大的发展空间。
1)基于仿生学原理的嗅觉追踪定位方法
仿生学原理是模拟生物追踪定位的方法,最常用的是化学趋向性方法。某些生物可以通过获取到的化学信息的浓度梯度来追踪化学物质的位置,例如粘液菌(slime mold)就是采用这种方法。大多数动物有两个气味感应器,鼻孔或者触角,它们会比较两个鼻孔闻到气味的浓度,然后转向接受信号最强的方向。Berg和Brown最早提出将这种方法应用在机器人嗅觉研究上,通过装在机器人上不同位置上两个化学传感器检测的浓度差异,机器人会以定常的运动速度朝向较高浓度的方向行进[14]。
Grasso和Belanger分别对龙虾、飞蛾的运动行为进行了研究,研究表明龙虾、飞蛾等生物都有极为相似的运动行为。根据此行为构建出逆风向以“之”字形运动的高效计算机仿真平台。在自主探测方法设计阶段,可以利用该仿真平台进行调试、优化、验证所设计的探测方法。这种运动形式可以使自身始终保持在羽状物内部,并逐渐接近羽状物源头[15-19]。Farrell和Pang通过研究飞蛾跟踪气味的过程,开发出了适用于机器人的羽状物搜索的任务规划器。通过几次水下机器人追踪水中化学羽状物的实验表明,该搜索方法是一种有效的羽状物追踪定位方法[20-21],田宇等人基于仿生行为设计、实现了一个计算机仿真环境[22-23]。
2)基于工程理论的嗅觉追踪定位方法
Vergassola等人提出了基于信息和编码理论的气味搜索方法——信息趋向性“infotaxis”。在此方法中信息扮演的角色类似于“化学趋向性”中的浓度。策略是使信息获取的预期速度在局部区域内达到最大化,并且用计算的数学模型模拟出羽状物的传播过程。信息趋向性法在仿真环境中的有效性得到了很好地验证[24]。Farrell和Pang[25]基于大尺度水平层流的羽状物模型,采用隐式马尔可夫的计算方法进行仿真,验证了估计羽状物扩散路径和羽状物源头概率分布的可行性。目前基于工程的方法基本停留在仿真实验阶段,还未进行过系统的真实实验的研究。
机器人嗅觉研究主要分为两部分。首先,将机器人在所处位置记录的流场信息与羽状物探测的历史信息相结合,构建出羽状物分布图,指示出可能含有羽状物源头的区域,机器人在这个区域探测到羽状物的可能性较大,这是一个在线构图问题。下一步基于这幅羽状物分布图,规划出指导机器人前进方向的路径。规划出的路径能够令机器人积累足够多的位置信息来提高羽状物分布图的准确性,同时可以让机器人找到源头分布概率最大的位置,是一个实时路径规划的问题。
本文首先通过贝叶斯理论对羽状物源头的概率分布进行估计[26],得出源头概率分布地图,根据概率分布地图的特点,利用人工势场法对羽状物进行追踪,最后对该方法进行了实验验证。
1 源头概率地图
嗅觉定位的最终目标是要锁定源头。利用工程的方法来实现这一目标,需要掌握湍流环境中羽状物的瞬时分布模型,由于描述湍流中羽状物的瞬时分布数学模型过于复杂,采用另一种不需要精确数学模型的方法来解决。利用概率的方式描述羽状物在空间和时间上的变化,通过机器人探测到的信息估算出最有可能的源头位置。
化学物质从源头释放后,在流体扩散的作用下形成化学羽状物,假设化学羽状物是由无数条细丝组成。不同的实验研究已经证明了时间平均的羽状物浓度沿着流体流动方向呈高斯分布[27-28]:
(1)

对于瞬时浓度分布的研究,很多研究者将羽状物运动视为分子的布朗运动叠加在流体中的运动之上。基于这种思想,羽状物细丝的位置可以表示为

(2)

根据式(2),如果已知源头位置以及流体在任意点的流速,就可以用向前递推算法计算出化学羽状物细丝的位置。
保证计算可行性的同时需要构建出一个适合化学羽状物绘图的模型[27],因此将羽状物搜寻区域分为若干个矩形网格,坐标系的设定以及n×m个网格的划分可参见图1。定义网格向量C=[C1,…,CN],表示搜索区域内的所有网格。在x方向上定义a∈[1,m]用来计数网格,在y方向上定义b∈[1,n]用来计数网格。利用机器人的位置信息就可以直接计算出机器人所在的网格序列号(a,b)。此外定义了一个额外的网格C0,额外的网格简化了后续的计算和处理,网格可以理解为搜索区域以外的整个环境,当化学羽状物离开搜索区域时,就可以认为进入了网格C0。

图1 搜索区域网格划分

为了计算源头概率分布图,首先考虑源头在时刻tl释放出化学羽状物细丝[29],在时刻tk(tk>tl)对式(2)进行积分可以得到羽状物细丝的位置和时间的分布状况:

(3)
其中X(tl,tk)是羽状物细丝在时刻tl的位置,Xs=(xs,ys)是在时刻tk源头释放出化学羽状物细丝的位置。
化学羽状物细丝在时刻tk的平均位置为
(4)
定义W(tl,tk)为一个高斯噪声过程:
(5)

通过解算式(3)能够获得可能的源头位置:
(6)
图1中的每个网格的中心坐标代表了网格的位置。由于网格的大小和机器人相似,并且远远小于整个搜索区域,因此可以得到在tk时刻的位置坐标为
Xv(tk)=Xj=(xj,yj)。
(7)
由于机器人只能获得离散时刻的流场数据和位置数据,因此定义了一个等式进行近似转化:

(8)
根据式(8)可以将式(6)转变为
Xs(tl,tk)=Xj-V(tl,tk)-W(tl,tk)。
(9)
其中机器人的位置决定了Xj,依据流体速度历史数据可以计算出V(tl,tk),因此Xj-V(tl,tk)是一个可计算的量。W(tl,tk)是一个高斯随机变量,均值是0,Xs(tl,tk)也是一个高斯随机变量,均值是Xj-V(tl,tk),方差是(tk-tl)σ2。源头位于Xi的概率取决于W(tl,tk)的概率分布,解方程(9)就可以求出源头的概率分布。
W(tl,tk)的概率密度函数(Probability density function-PDF)可写为
(10)
(11)


(12)
其中Lx,Ly分别是网格的边长。这样遍历所有的网格Ci,可得到源头位于任意网格Ci的概率,即源头概率分布地图。

以上讨论的是单个羽状物细丝的情况,以下是针对源头连续释放多个羽状物的情况进行两方面的讨论:
(13)
其中源头概率地图则可以用向量来表示。
(14)

式(13)和式(14)考虑的是只通过一次计算探测到或者没探测到的事件来建立源头概率地图的方法。在追踪过程中,会发生能够探测到和不能探测到的事件的集合,因此本文利用贝叶斯理论将之前一系列探测到和没探测到的事件整合到一起进行计算,将得到的信息用来更新源头概率地图。

B(tk-1)={Dj1(tk-1),Dj2(tk-2),…Djk(t0)}。
(15)
从t0时刻到tk-1时刻,所有探测到和没探测到事件而建立的概率地图为

(16)
其中M代表探测羽状物的事件集合。
在tk时刻网格Cj中探测到羽状物,可以通过式(13)计算得出源头概率地图
P(Ai|Dj(tk))=βij(t0,tk)。
(17)
在tk时刻网格Cj中没有探测到羽状物,可以通过式(14)得出在源头Ci释放出羽状物而在tk时刻网格Cj内没有探测到的概率:
(18)
在概率地图求解的过程中,每一次计算需要用到之前所有的记录信息,这种方法求解是精确的。但是,在实际运行过程中,计算机的计算资源十分有限,无法将所有之前的数据都进行处理,所以在实验时设定只对之前50秒所获得的数据信息(采集频率为1 Hz)进行保存,保存的数据信息用于源头概率地图的求解。
2 基于人工势场的羽状物追踪方法
将解决机器人路径规划问题上的人工势场法引入嗅觉搜索系统中,可以将机器人在工作环境中的运动近似为在虚拟空间中由于力场作用而引起的运动。机器人在人工势场环境下受到斥力场和引力场的共同作用,避开障碍物,向着羽状物源头位置前进。机器人所在位置受到的势为所有势场在该点作用之和,即斥力场和引力场的叠加,它的负梯度方向表示机器人受到抽象力的方向。由于无法知晓羽状物源头的具体位置,可以用源头概率分布图来产生引力场吸引机器人。通过人工势场法规划出一个最优的搜索轨迹,从而达到羽状物探测概率的最大化。
当机器人在流场中进行运动时,伴随机器人会产生一个w×w的网格区域[30],图2是人工势场理论示意。
这个区域称为“活动窗口”,机器人始终在窗口的中心位置。在活动窗口中的每个网格都会对机器人产生一个虚拟力。虚拟力与每个网格的源头概率值成正比,与机器人和网格之间的距离成反比。
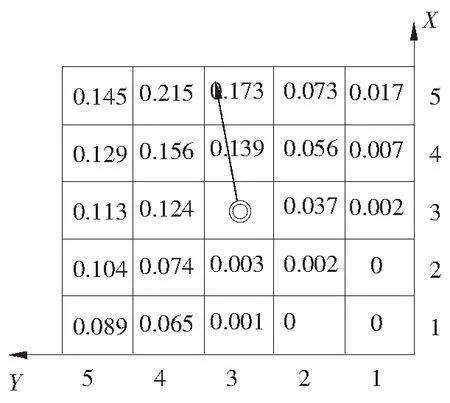
图2 人工势场方法示意
网格Ci对于机器人产生的虚拟力Fi:
(19)
d=‖Xv-Xi‖。
(20)
其中:LVi是网格Ci的源头概率值;d是网格Ci与机器人之间的距离。所有的虚拟力相加得到的虚拟合力F:
(21)
F的大小和方向对机器人的艏向和移动速度控制都有一定的影响。
如图2所示,机器人在搜索区域内沿着人工势场计算出的合力方向(箭头方向)进行羽状物的跟踪运动。若机器人在合力方向上进行运动一段时间后,没有发现新的羽状物信息,机器人返回羽状物发现行为。若发现新的羽状物信息,进行发现羽状物源头行为,羽状物源头搜寻具体流程如图3所示。
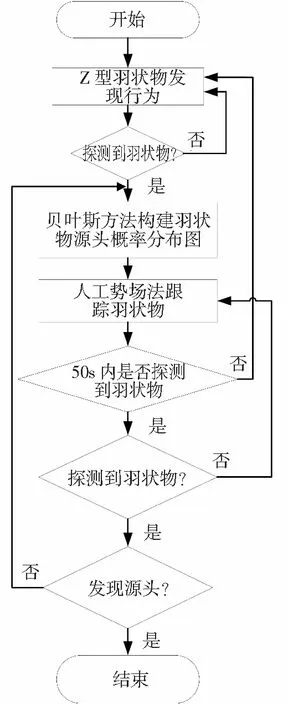
图3 羽状物源头搜寻任务规划器
3 实验结果和分析
为了得到复杂、时变的水流流场,将实验场地选择为江北松花江支流流域,实验区域的水深为4~10 m,水流以江水的流动为主。在实验期间,通过流速计对实验区域进行测量得到的流速约为0.1 m/s。
由于该水域没有可供探测和追踪的自然化学羽状物,因此,实验期间我们采用向水中释放罗丹明水溶液(释放量约为1~2 g/min,罗丹明水溶液无毒,如图4所示)模拟化学羽状物源头,释放的罗丹明溶液在水流的作用下扩散形成羽状流。

图4 模拟源头
为了便于观察羽状流的扩散情况,实验中将羽状流源头放至于水面以下0.2 m处。由于羽状流分布在近水面,所以羽状流的分布除了受水流影响外,还受到表面波浪的影响。虽然近水面释放的羽状流特性与水下羽状流分布特性不完全相同(主要体现在连续性方面),但能够直观地观察到羽状流的分布给实验带来了一定的方便,并且在实验期间水流表面波浪极小,对羽状流分布的影响不大。模拟源头位置约为(105 m,35 m),在实验中,罗丹明羽状物溶液在距离羽状物源头约70 m的位置被传感器检测到。
实验用水下机器人(如图5)具有两个主推、一个垂推、MPU6050磁罗经、GPS以及罗丹明传感器(Rhodamine-WT)(如图6),用于测量水中化学物质的浓度。在实验期间将罗丹明浓度阈值设定为1.0 μg/l。即超过1.0 μg/l,认为探测到罗丹明溶液,低于这个阈值认为没有探测到罗丹明溶液。在实验过程中水下机器人始终在水面进行追踪,没有使用垂向推进器进行深度控制。水下机器人的平均航行速度约为0.5 m/s,传感器采样频率为1 Hz,即每1 s采集一次数据。

图5 实验机器人

图6 (Rhodamine-WT)罗丹明传感器
整个搜索区域为60 m×120 m矩形区域,将搜索区域划分成30×60个网格,即1 800个网格。网格划分如图7所示。五角星位置代表的是模拟源头的位置,源头位置为(105 m,35 m)1 073网格。实验规定将机器人初始时刻的艏向设置为x轴的正向,机器人左侧的方向为y轴的正向。
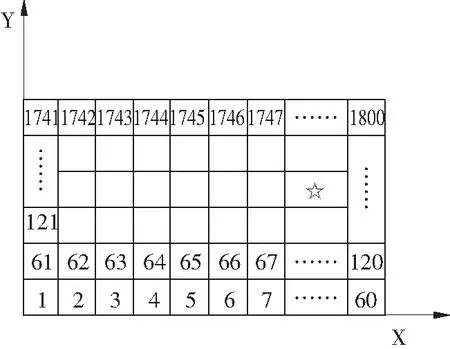
图7 实验区域网格划分
网格划分为30×60个网格,每个网格大小为2 m×2 m,这个尺寸和机器人的尺寸大小基本一致。
图8所示为机器人追踪羽状物路径图。机器人在(0 m,0 m)位置出发,源头位置在(105 m,35 m),即1 073网格。路径图显示机器人在搜索区域的右下角为起点,在开始阶段进行Z型搜索行为。当发现羽状物后转为人工势场方法进行追踪。机器人利用人工势场方法计算出的路径进行追踪,直到发现源头位置。

图8 追踪羽状流路径图
机器人在960 s时通过计算得出模拟源头位置为(103 m,39 m),机器人在1 019 s时移动到该位置,该位置与源头位置之间距离约为5 m。由于在实验中水下机器人带缆航行,为了避免机器人的缆与释放罗丹明的装置碰撞而发生危险,在到达源头附近区域后将水下机器人打捞出水。图8中绿色区域表示在整个追踪过程中探测到浓度的位置,可以看出第一次探测到浓度大于阈值的位置是在(35 m,39 m)位置。第一次探测到的位置距离源头位置的距离约为70 m。图9表示的是在实验过程中水流速度的变化。图10表示的是水下机器人探测到羽状物浓度的数值。浓度超过阈值就代表探测到化学物质,距离源头越近,探测到浓度大于阈值的概率就越大,这也符合常理。

图9 流速数据图
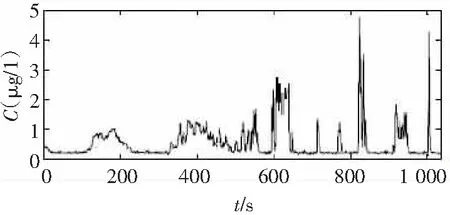
图10 羽状物浓度数据图
图11显示的是机器人在初始运动时刻(t=0 s),通过贝叶斯理论计算得出的概率地图,可以看出在没有任何信息的初始时刻,所有网格的概率都相同,为1/1 800,约为0.000 555。
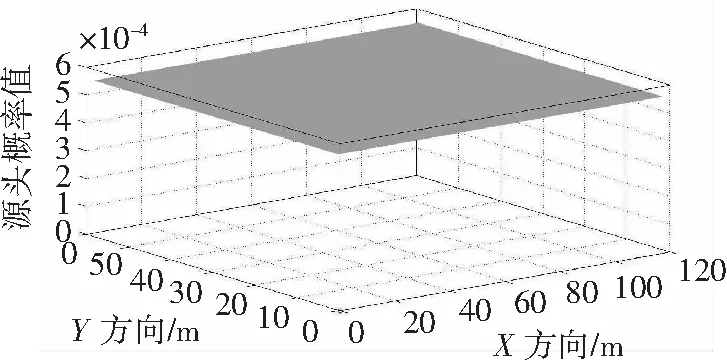
图11 t=0 s时刻源头概率分布图
图12显示的是机器人第一次探测的浓度值超过阈值时的概率分布图。第一次探测到的时间为368 s,机器人位置为(35 m,39 m)1 138网格,计算出的最大概率位置为(41 m,33 m)981网格。机器人位置距离概率最大位置的距离约为8.5 m。此时计算出的最大概率值为0.204 3,人工势场力的角度为-50.22°。
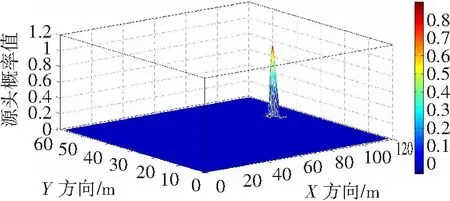
图12 第一次探测到化学物质时刻概率地图
Fig. 12 Odor source probability map of plume was searched first time
图13显示的是机器人在中间时刻计算得出的概率分布图。时间为712 s,机器人位置为(77 m,31 m)939网格,计算出的最大概率位置为(83 m,35 m)1 062网格。机器人位置距离概率最大位置的距离约为8.5 m。此时计算出的最大概率值为0.410 6,人工势场力的角度为44.34°。
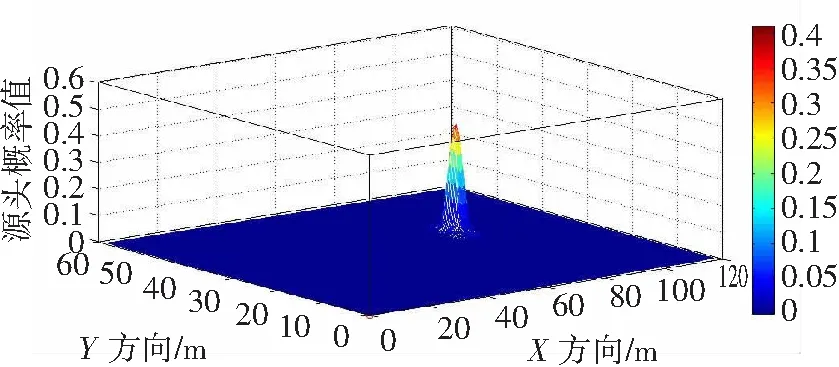
图13 t=712 s时刻概率分布地图
图14显示的是机器人在t=960 s时刻计算得出的概率分布图。机器人位置为(99 m,41 m)1 250网格,计算出的最大概率位置为(103 m,39 m)1 192网格。机器人位置距离概率最大位置的距离约为5 m。此时计算出的最大概率值为0.9018,人工势场合力的角度为-27.53°。

图14 t=960 s时刻概率分布地图
根据图12,图13,图14可以看出在小范围内的源头概率值很高,而在小范围以外的区域概率值都非常小。并且源头概率地图逐渐收敛至源头附近位置,同时概率值逐渐增加。从实验结果来看,机器人可以实时估算出源头概率地图,通过人工势场的方法得到跟踪羽状物的准确路径,从而有效地跟踪羽状物直至确认羽状物源头。
图15为指令艏向角曲线图。该曲线图在初始时刻进行的是Z型搜索,搜索角度为±75°。在368s第一次探测的浓度超过阈值之后,指令艏向角是通过计算人工势场合力的角度得出。人工势场合力的角度就是机器人的指令艏向角。
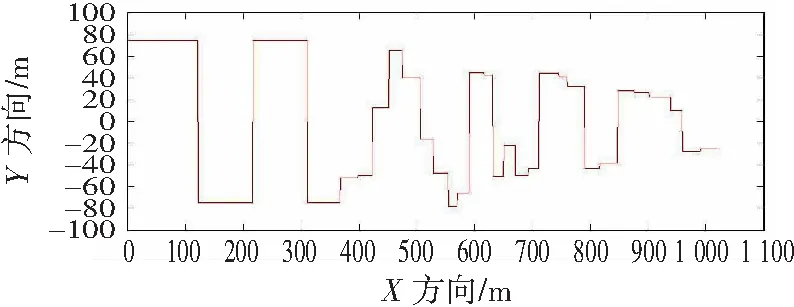
图15 指令艏向角曲线图
从实验结果来看,在真实的水流环境下,基于人工势场理论的机器人羽状物跟踪方法可以有效的估算出的羽状物源头概率分布地图并且计算出羽状物的跟踪路径,机器人可以沿着搜寻路径跟踪羽状物,直至确认羽状物源头。
4 结 论
本文对嗅觉定位技术进行了研究,利用贝叶斯理论对羽状物源头的概率分布进行估计计算,绘制出源头概率分布地图。针对化学羽状物追踪问题提出了基于人工势场的追踪策略方法。并且对于机器人化学羽状物追踪问题进行了真实水流环境下的追踪实验。实验结果验证了贝叶斯理论实时在线更新源头概率分布图的可靠性。同时证明了人工势场法的有效性,说明基于工程理论的嗅觉追踪策略也同样适用于真实水流环境,加入人工势场方法以及传感器和计算资源的优势,能够得到比利用生物仿生行为追踪方式更好的效果。
[1] DUSENBERY D B.Sensory Ecology:How Organisms Acquire and Respond to Information[M]. WH Freeman and Co,New York,1992.
[2] VICKERS N J.Mechanisms of animal navigation in odor plumes[J]. Biological Bulletin,2000, 198(2):203-212.
[3] ZIMMER R K, BUTMAN C A. Chemical signaling processes in the marine environment[J]. Biological Bulletin,2000,198(2):168-187.
[4] HASSLER A D, SCHOLZ A T. Olfactory Imprinting and Homing in Salmon[M]. Springer-Verlag,New York,1983.
[5] NEVITT G A. Olfactory foraging by antartic proellariiform seabirds: Life at high Reynolds numbers[J]. Biological Bulletin,2000,198(4):245-253.
[6] CARDE R T, Mafra-Neto A. Effect of pheromone plume structure on moth orientation to pheromone[J]. Perspectives on Insect Pheromones, 1996,275-290.
[7] CARDE R T. Odour plumes and odour-mediated flight in insects[J]. Ciba Found Symp. 1996,200:54-70.
[8] Mafra-Neto A and CARDE R T. Fine-scale structure of pheromone plumes modulates upwind orientation of flying moths[J]. Nature,1994,369:142-144.
[9] BELL W J,TOBIN T R. Chemo-orientation[J]. Biol. Rev. 1982,57:219-260.
[10] LYTRIDI C,KADER E E, VIRK G S. A systematic approach to the problem of odour source localization[J]. Autonomous Robots,2006,20(3):261-276.
[11] KING T L,HORINE F M,DALY K C,et al. Explosives detection with hard-wired moths[J]. IEEE Transactions on Instrumentstion and Measurement,2004,53(4):1113-1118.
[12] HAYES A T, MARTINOLI A, GOODMAN R M. Distributed odor source localization[J]. IEEE Sensors Journal,2002, 2(3):260-271.
[13] LI W, FARRELL J A, PANG S,et al. Moth-inspired chemical plume tracing on an autonomous underwater vehicle[J]. IEEE Transactions on Robotics,2006,22(2):292-307.
[14] BERG H C and BROWN D A. Chemotaxis in escherichia coli analysed by three dimensional tracking[J]. 1972(239):500-504.
[15] BELANGER J H,WILLIS M A. Adaptive control of odor-guider location: Behavioral flexibility as an antidote to environmental unpredictability[J]. Adaptive Behavior,1998,4:217-253.
[16] BELANGER J H,WILLS M A. Biologically-inspired search algorithms for locating unseen odor sources[C]//Proceedings of the 1998 IEEE ISIS/CIRA/ISAS Joint Conference on the science and Technology of Intelligent Systems, Gaithersberg,USA: IEEE, 1998,265-270.
[17] GRASSO F W, CONSI T, MOUNTAIN D, et al. Locating odor sources in turbulence with a lobster inspired robot[C]//From Animals to Animals 4: Proceedings of the Fourth International Conference on Simulation of Adaptive Behavior, Cambridge,MA,1996, 104-112.
[18] GRASSO F W,CONSI T R,MOUNTAIN D C,and ATEMA J. Biomimetic robot lobster performs chemo-orientation inturbulence using a pair of spatially separated sensors: Progress and challenges[J]. Robotics and Autonomous Systems,2000,30(1):115-131.
[19] GRASSO F W. Invertebrate-inspired sensory-motor systems autonomous,olfactory-guided exploration[J],Biological Bulletin,2001,200:160-168.
[20] LI W,FARRELL J A,PANG S,et al. Moth behavior based subsumption architecture for chemical plume tracing on a REMUS autonomous underwater vehicle[J]. IEEE Transactions on Robotics and Automation,2006,22(2):292-307.
[21] LI W, FARRELL J A,CARDE R T. Tracking of fluid-advected odor plumes: Strategies inspired by insect orientation to pheromone[J]. Adaptive Behavior,2001,9(3-4):143-170.
[22] 田宇,李伟,张艾群.自主水下机器人深海热液羽状流追踪仿真环境[J]. 机器人. 2012,34(2):159-168
TIAN Yu, LI Wei, ZHANG Aiqun. A simulation environment for deep-sea hydrothermal plume tracing with autonomous underwater vehicles[J]. Robot, 2012,34(2):159-168.
[23] 田宇,张艾群,李伟. 一种自主水下机器人追踪深海热液浮力羽流的基于行为规划算法[C].第32届中国控制发展会议. 2013,7:5819-5825.
TIAN Yu,ZHANG Aiqun,LI Wei. A behavior-based planning algorithm for tracking of deep-sea hydrothermal buoyant plumes with autonomous underwater vehicles[C]//Proceedings of the 32nd Chinese control conference. 2013,7:5819-5826.
[24] VERGASSOLA M, VILLERMAUX E, SHRAIMAN BI. Infotaxis as a strategy for searching without gradients[J]. Nature,2007,445(7126):406-409
[25] FARRELL J A, PANG S,LI W. Plume mapping via hidden markov methods[J]. IEEE Transactions on Systems,Man,and Cybernetics-Part B: Cybernetics,2003,33(6):850-863
[26] PANG S, FARRELL J A. Chemical plume source localization[J]. IEEE Transactions on Systems,Man,and Cybernetics-Part B: Cybernetics,2006, 36(5):1068-1079
[27] GONEALO Cabrita, PEDRO Sousa, LINO Marques. Player/Stage simulation of olfactory experiments[C]//2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taiwan,2010:1120-1125.
[28] CRIMALDI J. P.,WILEY M B,KOSEFF J R. The relationship between mean and instantaneous structure in turbulent passive scalar plumes [J]. Journal of Turbulence,2002,3(14):215-220
[29] 李吉功. 室外时变气流环境下机器人气味源定位[D].天津:天津大学. 2010.
[30] 纠海峰. 水下机器人在湍流环境下对化学羽状物的追踪定位[D]. 哈尔滨:哈尔滨工程大学.2011.
(编辑:刘素菊)
Chemical plume tracing and localization method based on olfaction for underwater
DENG Wei, HAN Duan-feng, JIU Hai-feng
(College of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, China)
To solve the problem of underwater vehicle searching chemical plume in real water environment, and based on biological olfactory positioning principle, efficiency and accuracy of searching was improved. a probability distribution map was built and a kind of path planning strategy was proposed. According to the flow field and plume information which were detected by vehicle in its searching area after chemical plume was released, trend of chemical plume in time and space was described based on Bayesian theory. And best search track was planned based on artificial potential field (ATF) method. The underwater vehicle can search along the tracking path above until found the plume source. Through tracing experiments in real water flow environment, the result was good and the feasibility of the tracing path was verified.
underwater vehicle; biological olfactory location; plume track; Bayesian theory; artificial potential field
2015-07-06
国家自然科学基金(61175095)
邓 薇(1985—),女,博士研究生,研究方向为水下机器人路径规划;
韩端锋(1966—),男,教授,博士生导师,研究方向为水下机器人智能技术;
邓 薇
10.15938/j.emc.2016.01.017
TP 24
A
1007-449X(2016)01-0110-09
纠海峰(1985—),男,博士研究生,研究方向为机器人嗅觉研究。
