多机器人的积分滑模编队控制
2016-12-01钱殿伟郭锦荣
钱殿伟, 郭锦荣
(华北电力大学 控制与计算机工程学院,北京 102206)
多机器人的积分滑模编队控制
钱殿伟, 郭锦荣
(华北电力大学 控制与计算机工程学院,北京 102206)
以一组非完整约束两轮机器人为研究对象,提出了具有非匹配不确定性的移动机器人系统的积分滑模编队控制。在单个机器人运动学模型的基础上,考虑机器人自身参数变化、打滑和侧移等不确定性的影响,采用领航-跟随机制,建立了编队系统的动力学模型。该动力学模型含有非匹配不确定性,无法应用积分滑模控制的不变性抑制。在合理的假设下,从理论上证明了具有非匹配不确定的编队系统在滑模阶段具有局部渐近稳定性;证明了提出的积分滑模编队控制律能够保证滑模的可达性条件。最后以三个机器人组成仿真实验平台,验证了在非匹配不确定性的了积分滑模编队控制方法的有效性及可行性。
多机器人; 领航-跟随; 编队控制; 非匹配不确定性; 积分滑模
0 引 言
与单个复杂机器人相比,多个简单机器人构成的协调系统在工作效率、灵活性及鲁棒性等方面更具优势[1-2]。编队控制是多机器人协调技术的一个重要研究领域,在巡逻、搜寻、侦察、空间探测、无人机编队飞行等领域,编队控制有着十分广泛的应用前景和实用价值[3-5]。
多机器人的编队控制是指多个机器人组成的团队在执行任务的过程中,在适当的环境约束下,相互之间保持预定的几何关系[6-7]。编队控制有多种机制,如行为法[8]、虚拟结构法[9]、领航-跟随法[10-11]及人工势场法[12]等。其中,领航-跟随法的基本思想是在多机器人系统中指定某个机器人为领航者,其他机器人均被定义为跟随者;领航机器人负责跟踪某一特定的轨迹,通过控制跟随机器人使之以一定的距离和相角跟踪领航机器人,从而实现多机器人系统以期望队形运动。这种分散的结构可以将整个多机器人编队问题简化为若干个机器人的轨迹跟踪问题,从而减轻机器人之间通信的压力。采用领航-跟随编队机制,常用的编队控制方法包括反馈线性化[13]、预测控制[14]、自适应控制[15]、滑模控制[11,16]及智能控制[17-19]等。
在实际应用中,编队系统存在负载变化、参数摄动、测量噪声、摩擦及外部扰动等诸多不确定性。这些不确定性分为匹配不确定和非匹配不确定两类。滑模控制在滑动模态下对匹配不确定性具有不变性,而目前的滑模编队控制器设计并没有从理论上分析非匹配不确定性对编队控制系统的影响[11,13,20]。本文探讨具有非匹配不确定性的多机器人系统积分滑模编队控制问题,重点研究在滑动模态下的系统稳定性和滑动模态的可达性,通过对比仿真实验验证此方法的有效性。
1 数学模型
如图1所示,两驱动轮式移动机器人是一个非完整约束系统。其运动状态由其两个驱动轮的轴中点O'在坐标系的位置及航向θ来表示,令q=[xyθ]T,其中(x,y)为移动机器人的位置,θ为移动机器人前进方向与x轴的夹角。
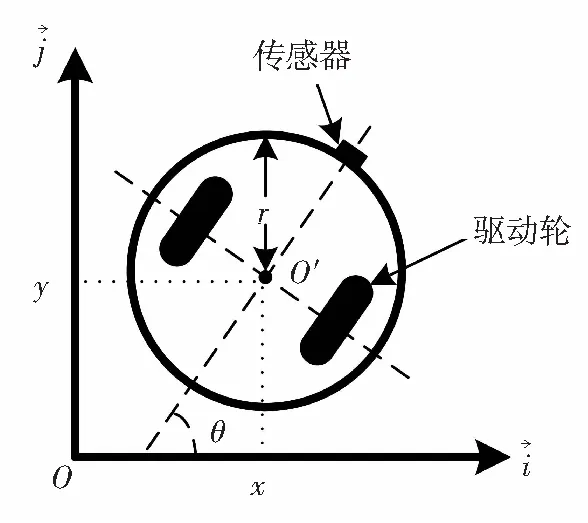
图1 非完整移动机器人结构
在一组包括N个非完整移动机器人的编队系统中,第n机器人的理想运动学方程为
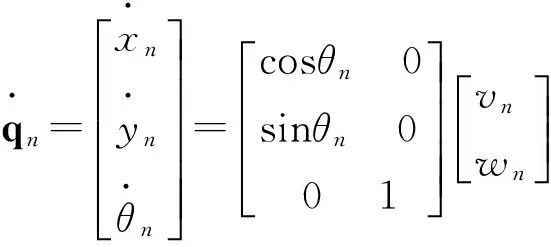
(1)
vn和wn分别为线速度和角速度,是机器人的控制输入。考虑到机器人质量及受力的变化,机器人的动力学模型可描述为
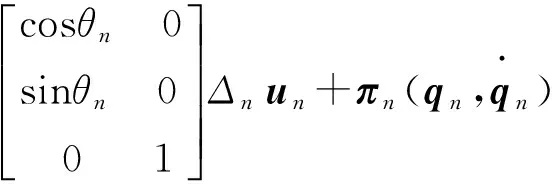
(2)
un=[αnβn]T是控制输入向量。αn=Fn/mn代表加速度,βn=τn/Jn代表角加速度,mn和Jn表示机器人自身的质量和转动惯量,Fn及τn分别表示施加到机器人上的力和力矩。Δn表示为

在领航-跟随者结构中,选取第i个机器人为领航者,剩余N-1个机器人作为跟随者,选第k个跟随者作为代表,领航者和跟随者的协调结构如图2所示。跟随者k与领航者i的相对距离和相对相角分别为

(3)
ψik=π+ζik-θi。
(4)

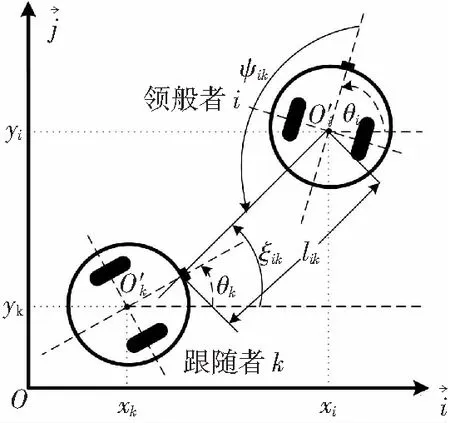
图2 跟随-领航者协调结构
Fig. 2Schematicdiagramoftheleader-followercooperativemechanism
对相对距离和相角求二阶导,令xik=[x1x2x3x4]T,其中x1=lik,x3=ψik,x2和x4分别是x1和x3的一阶导,得到跟随-领航者编队体系结构动力学模型的状态空间表达式

(5)
有φik=ψik+θi-θk,各参数矩阵描述如下
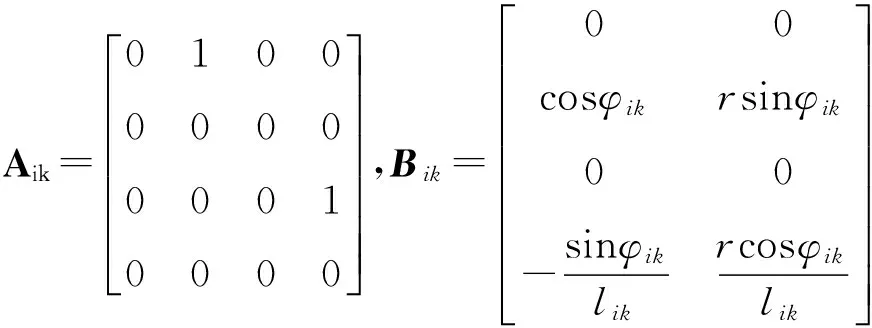
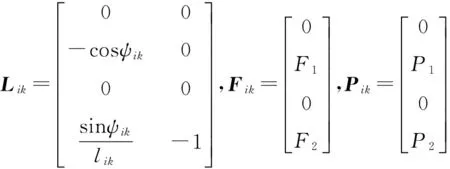
dik(t)=BikΔkuk+Lik(I2+Δi)ui+Fik+Pik,

P1= -(πix-πkx)cos(ψik+θi)-
(πiy-πky)sin(ψik+θi)+rπkθsinφik(πix-πkx)
sin(ψik+θi)

注:rank[BikBikAik]=4,编队系统可控,可进行极点配置。dik(t)表示全部不确定性,BikΔkuk表示跟随者k自身的参数变化属于匹配不确定性,剩余3项均属于非匹配不确定性。
2 控制器设计及稳定性分析
(6)


对式(6)求导并将式(5)代入得到
=GikBikKikxik+GikBikuk+Gikdik(t)。
(7)

ukeq=-Kikxik-(GikBik)-1Gikdik(t)。
(8)
将式(8)代入式(5),得到滑动模态下编队系统的状态方程

(9)

(10)
通过选取合适的状态反馈矩阵Kik可使Aik满足如下李雅普诺夫稳定性方程

(11)
上式中Mik为正定对称阵,Nik为方程的解。

(12)
证明:选取正定能量函数V1(t)=xikTNikxik,对其求并将式(10)和式(11)依次代入得到
(13)
根据不确定性有界的假设,有


(14)
(15)
理论上,积分滑模控制的滑动模态发生在运动初始时刻,但实际中由于非匹配不确定性的存在,有必要对滑动模态的可达性进行验证。可达性条件如下

(16)
定理2:设计积分滑模控制律(17)可使编队系统满足可达性条件(16)。
(GikBik)-1κiksgn(sik)-(GikBik)-1ηiksik。
(17)
其中,ones(4,1)为[1,1,1,1]T。选取常数ηik>0且κik> ‖Gik‖2‖ik×ones(4,1)-dik(t)‖2。
证明:选取李雅普诺夫函数V2(t)=‖sik‖2,对其求导并将式(7)代入得到

(18)

(19)

3 仿真结果
以3个机器人组成的编队系统为例,仿真验证积分滑模控制方法的有效性。圆形机器人的半径r=0.05 m,领航者i=1,跟随者k=2,3。选择15%的参数波动

(20)
外部扰动
πix=πiy=πiθ=0.5sin(2πt),
πkx=πky=πkθ=0.2sin(πt)。
(21)
(22)
参数矩阵Gik=Kik。κ12=κ13=1.00,η12=η13=25.00。

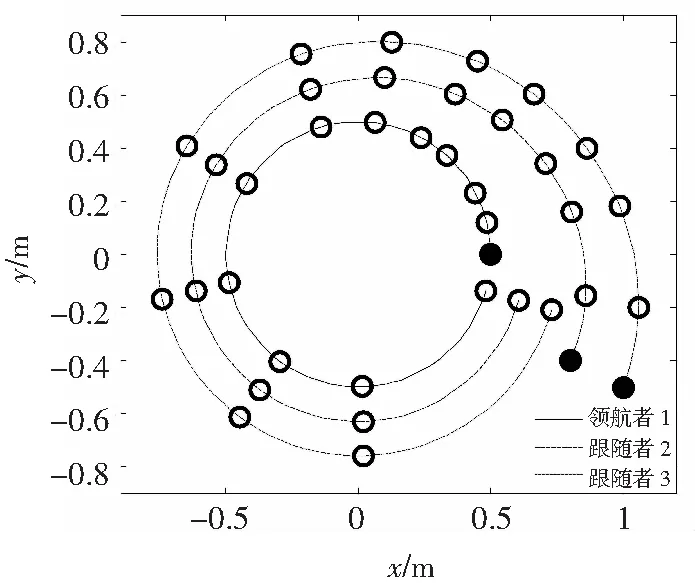
图3 线形队形走圆形轨迹
采用文献[11]中的二阶滑模控制方法与积分滑模控制方法进行对比实验,仿真结果如图4~图6所示。从图4看出积分滑模控制方法可以迅速地使3个机器人形成线性队形,并以较高的跟踪精确度保持该队形运动。二阶滑模控制方法的动态响应时间较长,队形形成过程慢;此外,由于非匹配不确定性的影响,该控制系统在编队形成后存在波动。
滑模控制的不连续性导致了抖振问题,正如图5,二阶滑模控制器输出的加速度和角加速度均存在高频切换,这将加速机器人机械部分的的磨损且对驱动电机的冲击大,而积分滑模控制器有效地缓解了这一问题。根据图6,编队系统在2 s时进入了滑动模态。根据定理2当编队系统进入滑动模态后,不确定性的存在会使系统在滑模面附近产生颤动,但此时状态lik和ψik已进入平衡点领域内,故系统保持局部渐近稳定。
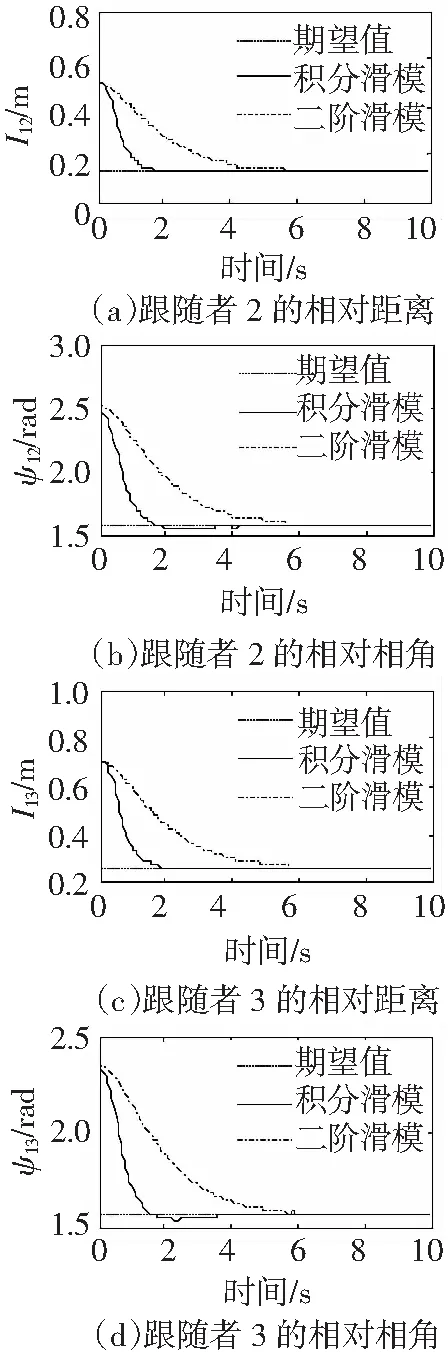
图4 状态轨迹
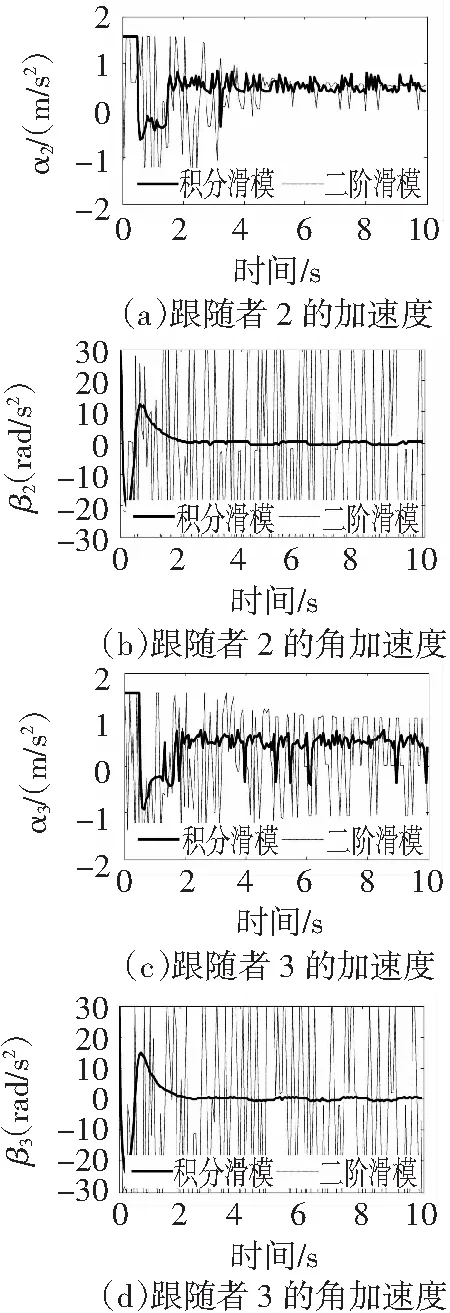
图5 控制量
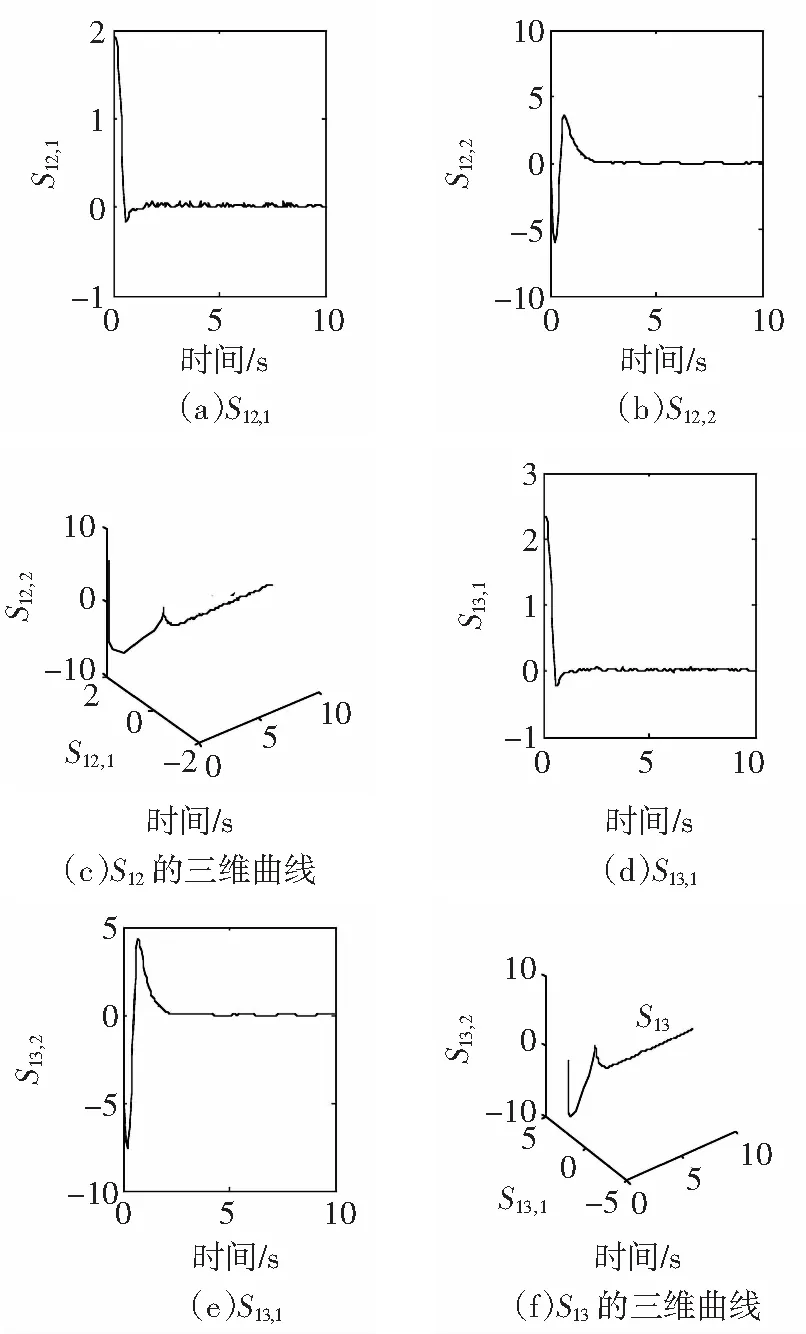
图6 积分滑模面
4 结 论
本文提出了具有非匹配不确定性的多机器人编队系统的积分滑模控制。建立了基于领航-跟随机制的编队系统动力学模型,从理论上分析了编队系统在滑动模态下的稳定性情况及滑动模态的可达性条件。在由三个移动机器人组成的多机器人系统仿真平台上,通过与二阶滑模编队控制的对比实验,验证了提出的控制方法可以快速的实现多机器人编队并以较高的跟踪精度保持期望队形。
[1] 谭民,王硕,曹志强. 多机器人系统 [M] 北京:清华大学出版社,2005.
[2] SAING P H, CHIEN C C. Can a simple control scheme work for a formation control of multiple autonomous underwater vehicles [J]. IEEE Transactions on Control Systems Technology, 2011, 19(5): 1090-1100.
[3] 周超,曹志强,王硕,等. 微小型仿生机器鱼设计与实时路径规划 [J]. 自动化学报,2008,34(7):772-777.
ZHOU Chao, CAO Zhiqiang, WANG Shuo, et al. The design and path planning of a miniature biomimetic robotic fish [J]. ACTA AUTOMATICA SINICA, 2008,34(7): 772-777.
[4] CASBEER D W, KIJNGSTON D B, BEARD R W, et al. Cooperative forest fire surveillance using a team of small unmanned air vehicles [J]. International Journal of Systems Science, 2006, 37(6): 351-360.
[5] MONTEIRO S, BICHO E. Attractor dynamics approach to formation control: theory and application [J]. Autonomous Robots, 2010, 29(3-4): 331-355.
[6] 朱玲,李艳东,孙明,等. 移动机器人编队的神经网络滑模控制[J]. 电机与控制学报,2014,18(3):113-118.
ZHU Ling, LI Yandong, SUN Ming, et al. Sliding mode control mobile robot formations based on neural networks [J]. Electric Machines and Control, 2014, 18(3): 113-118.
[7] ZHOU C, CAO Z Q, WANG S, et al. A marsupial robotic fish team: Design, motion and cooperation [J]. Science China-Technological Sciences, 2010, 53(11): 2896-2904.
[8] LIANG H Z, SUN Z W, WANG J Y. Finite-time attitude synchronization controllers design for spacecraft formations via behavior-based approach [J]. Proceedings of the Institution of Mechanical Engineerings Part G-Journal of Aerospace Engineering, 2013, 227(11): 1737-1753.
[9] SADOWSKA A, BROEK T, HUIJBERTS H, et al. A virtual structure approach to formation control of unicycle mobile robots using mutual coupling [J]. International Journal of Control, 2011, 84(11): 1886-1902.
[10] CONSOLINI L, MORBID F, PRATTICHIZZO D, et al. Leader-follower formation control of nonholonomic mobile robots with input constraints [J]. Automatica, 2008, 44(5): 1343-1349.
[11] DEFOORT M, FLOQUET T, KOKOSY A. Sliding-mode formation control for cooperative autonomous mobile robots [J]. IEEE Transactions On Industrial Electronics, 2008, 55(11): 3944-3953.
[12] ZANG M, SHEN Y, WANG Q. Dynamic artificial potential field based multi-robot formation control [C]//IEEE International conference Instrumentation and Measurement Technology. Austin, Tx, 2010: 1530-1534.
[13] DONGKYOUN C. Tracking control of differential-drive wheeled mobile robots using a backstepping-like feedback linearization [J]. IEEE Transactions on System, Man, and Cybernetics-Part A:Systems and Humans, 2010, 40(6): 1285-1295.
[14] FUKUSHIMA H, KON K, MATSUNO F. Model predictive formation using nranch-and-bound compatible with collision avoidance problems [J]. IEEE Transactions on Robotics, 2013, 29(5): 1308-1317.
[15] LEE H. Robust adaptive fuzzy control by backstepping for a class of MIMO nonlinear system [J]. IEEE Transactions on Fuzzy System,2011, 19(2): 265-275.
[16] LIU H, LI J F. Terminal sliding mode control for spacecraft formation flying [J]. IEEE Transactions on Aerospace and Electronic System,2009, 45(3): 835-846.
[17] 王雪松,高阳,程玉虎,等. 知识引导遗传算法实现机器人路径规划[J]. 控制与决策,2009,24(7):1043-1049.
WANG Xuesong, GAO Yang, CHENG Yuhu, et al. Knowledge-guided genetic algorithm for path planning of robot [J]. Control and Decision, 2009, 24(7): 1043-1049.
[18] 潘杰,王雪松,程玉虎. 基于改进蚁群算法的移动机器人路径规划[J]. 中国矿业大学学报,2012,41(1):108-113.PAN Jie, WANG Xuesong, CHENG Yuhu. Improved ant colony algorithm for mobile robot path planning [J]. Journal of China University of Mining & Technology, 2012, 41(1): 108-113.
[19] DIERKS T, JAGANNATHAN S. Neural network-based optimal control of mobile robot formations with reduced information exchange [J]. IEEE Transactions on Control System Technology,2013, 21(4): 1407-1415.
[20] PARK B S, YOO S J, PARK J B, et al. Adaptive neural sliding mode control of nonholonomic wheeled mobile robots with model uncertainty [J]. IEEE Transactions on Control System Technology, 2009, 17(1): 207-214.
(编辑:贾志超)
Formation control of multi-robot via integral sliding mode
QIAN Dian-wei, GUO Jin-rong
(School of Control and Computer Engineering, North China Electric Power University, Beijing 102206, China)
A group of nonholonomic two-wheeled mobile robots were studied. The method of integral sliding mode control (ISMC) was investigated for the formation problem of the group of robots with mismatched uncertainties. Taking the effects of uncertainties (parameter fluctuations, skidding and slipping) into accounts, the leader-follower formation dynamic model was established on the basis of the kinematic model of a single robot. Since the mismatched uncertainties in this dynamic model cannot be suppressed by the invariance of ISMC, the formation system was theoretically proven to be locally asymptotically stable in the sliding mode stage. Meanwhile, the reaching condition of sliding mode was guaranteed by the developed ISMC law. Finally, a simulation platform composed of three robots verifies the feasibility and effectiveness of the ISMC strategy applied to the mobile robot formation system.
multi-robot; leader-follower; formation control; mismatched uncertainties; integral sliding mode
2014-12-10
国家自然科学基金(60904008);河北省自然科学基金(F2012502023)
钱殿伟(1980—),男,博士,副教授,研究方向为智能机器人技术、欠驱动机器人控制等;
郭锦荣(1991—),女,硕士,研究方向为多机器人系统协调控制。
钱殿伟
10.15938/j.emc.2016.01.015
TP 242.6
A
1007-449X(2016)01-0099-06
