抗冲击噪声的核对数最小绝对差算法
2016-11-30曾俊俊
林 云,雷 洋,曾俊俊
(重庆邮电大学 移动通信技术重庆市重点实验室,重庆 400065)
抗冲击噪声的核对数最小绝对差算法
林云,雷洋,曾俊俊
(重庆邮电大学 移动通信技术重庆市重点实验室,重庆 400065)
提出了一种鲁棒核自适应滤波算法,其结合了核空间和最小对数绝对差(LLAD)算法,使用对数代价函数来解决冲击噪声对算法收敛的影响,从而提高算法的抗干扰性能。核对数最小绝对差(KLLAD)算法实现了类似核最小均方误差(KLMS)算法的收敛性能,而且KLLAD算法具有很强的抗干扰能力,在非线性系统辨识中的鲁棒性和收敛方面具有很好的表现。
自适应滤波;系统辨识;鲁棒性
0 引言
核方法作为解决非线性问题的有效手段得到了全面的关注和研究,它的原理是把输入信号映射到高维的特征空间中,在高维的特征空间里再进行线性运算[1],从而解决非线性问题。核方法不需要知道映射的具体形式,只需要确定变换后内积的核函数的形式。基于最小均方误差(LMS)算法的核最小均方误差(KLMS)算法已经被证明能够在有高斯噪声的环境下很好地解决非线性问题[2],而在实际应用中往往会存在着非高斯冲击噪声[3],因而 KLMS算法的性能会受到很大的影响。在线性算法中,用对数作为代价函数的最小对数绝对差(LLAD)算法被用来解决这种存在非高斯噪声的问题[4]。文献[4]中的实验结果表明,最小对数绝对差(LLAD)算法和传统的最小均方误差(LMS)算法相比,前者具有很好的抗冲击干扰能力,但是LLAD算法仅仅适用于线性系统。本文将LLAD算法引入到核空间中,提出核最小对数绝对差(KLLAD)算法,以此来解决存在非高斯噪声的非线性问题,由于KLLAD算法以对数作为代价函数,能够降低测量误差 e(i)对算法更新的影响,所以它在鲁棒性和收敛方面都有很好的表现。
1 KLMS和LLAD自适应滤波算法
1.1KLMS算法
Mercer核是一个连续、对称、正定的核函数 κ:Rm× Rm→R[5],常用的核函数包括高斯核和多项式核,本文使用的高斯核定义如下:

其中 h是核参数,根据 Mercer的理论研究,任何核函数κ(u,u′)都可以通过映射φ以内积的形式把输入空间 U映射到高维特征空间 F(内积空间)中[6],其数学表达式如下:

如果定义φ(u)=κ(u,·),则特征中空间 F本质上也是一个核再生希伯特空间,KLMS算法实质上就是在特征空间F中的线性LMS算法[2]。首先,通过映射φ将输入信号u(i)映射到特征空间F中后变成φ(u(i)),定义φ(i)=φ(u(i)),然后对新的输入数列{φ(i),d(i)}应用 LMS算法可以得到:

其中,e(i)是第 i次的预测误差,η是步长,w(i)是对特征空间中对自适应滤波器抽头矢量的估计。由式(3)可以看出,KLMS算法本质上是在高纬特征空间中的线性LMS算法,是解决非线性问题的有效手段,有着非常广泛的应用。
1.2LLAD算法
在传统的 LMS算法中,定义输入信号为 u(i),期望输出为d(i),滤波器输出为y(i),误差信号e(i)=d(i)-y(i)= d(i)-w(i)Tu(i),w(i)是自适应滤波器的抽头系数矢量,最常见的代价函数是E(e(i)2),通过减少代价函数来逼近待辨识的系统,而在LLAD算法中应用对数作为代价函数[4]:

对式(4)求导可得:

当式(5)=0时,代价函数便取得最优解,其中 a为设计的参数且a>0,因此LLAD算法的自适应滤波器的抽头矢量更新表达式变为:

其中μ为步长参数。
分析式(6)可知,当e(i)很大时算法更新近似于符号(SA)算法,当 e(i)很小时,算法更新近似于传统的 LMS算法。因此LLAD算法综合了LMS和SA两种算法[4],与LMS算法相比具有很好的抗冲击噪声性能,与SA算法相比具有更好的收敛性能。
2 KLLAD自适应滤波算法
最小对数绝对差(LLAD)算法虽然具有很好的抗冲击噪声性能和收敛性能,但其只适用于线性系统,并不能直接用来解决非线性问题,因此本文在LLAD算法的基础上提出KLLAD算法,在核空间中应用LLAD算法,把LLAD算法推广到核空间来解决非线性问题,并用系统辨识来验证其鲁棒性和收敛性能。
首先,通过映射 φ将输入信号u(i)映射到特征空间F中后变成φ(u(i)),定义 φ(i)=φ(u(i)),然后对新的输入数列{φ(i),d(i)}应用 LLAD算法可以得到 KLLAD算法,KLLAD算法第i次的预测误差:

由式(4)可以得出KLLAD算法的代价函数为:

其中F(e(i))=E(|e(i)|)。
对式(8)求导可得到:

如果▽wF(e(i))=0或者F(e(i))=0,则对数代价函数可以取得最优解,所以对数代价函数J(e(i))的最优解与代价函数 F(e(i))的最优解是一致的[4]。由于 F(e(i))=E(|e(i)|),利用式(6)可以得出:

其中 μ是步长,w(i)是对特征空间中对自适应滤波器抽头矢量的估计,如果定义w(0)=0,则可得到:
KLLAD在特征空间中的学习曲线为:

自适应滤波器的输出fi=w(i)Tφ(·),如果定义φ(u(i))= κ(u(i),.),则KLLAD在原始空间中的学习曲线为:
综上所述,KLLAD算法本质上是在特征空间中的LLAD算法,所以其具有LLAD算法的鲁棒性。
3 实验仿真结果分析
系统辨识是自适应滤波器的一个重要应用,本文用非线性系统辨识来验证KLLAD算法的性能,定义系统噪声由高斯噪声和非高斯冲击噪声线性组合而成,系统噪声混入期望信号对期望信号产生干扰,实验中分别用KLLAD、KLMS和 LLAD三种算法来对该未知系统进行逼近,并对比三种算法的鲁棒性和收敛性。
非线性系统由一个线性信道和一个非线性信道组合而成[7],其中线性信道选择为:H(z)=1+0.2z-1,非线性信道为:y=x-0.9x2,其中 x为线性信道的输出。定义非高斯冲击噪声表示为KiAi,Ki是一个伯努利过程且p(Ki=1)= pr,Ai是零均值的高斯过程,系统噪声 n(i)由一个方差为σ2的白高斯噪声和冲击噪声 KiAi组成[8,9],在实验中KLLAD算法的参数设定为:核参数h=0.1,σ2=0.4,a=5[4],μ=0.1;KLMS算法中 σ2=0.4,μ=0.05;LLAD算法中 σ2= 0.4,μ=0.01。三种算法的训练数据是1 000,测试数据是100,学习曲线取计算30次的平均值。三种算法的性能对比如图1、图2和图3所示。其中图1是没有非高斯冲击噪声的环境,即pr=0;图2是存在5%的非高斯冲击噪声的情况(pr=0.05,Ai=150);图3是存在很大单点非高斯冲击噪声的情况(A500=1 500)。
从图1可以看出:在没有冲击噪声的环境下,KLLAD(μ=0.1)算法和 KLMS算法(μ=0.05)具有相近的稳态误差,而且KLLAD算法收敛速度比KLMS要快;与LLAD算法(μ=0.01)相比,KLLAD算法的稳态误差要远远低于LLAD算法,由此也证明了LLAD算法不适用于非线性系统,表明了提出KLLAD算法的必要性。从图2可以看出:在存在非高斯冲击噪声的环境里,KLLAD算法与LLAD都有很好的鲁棒性,能够避免冲击噪声对算法更新迭代的影响,使算法具有稳定性;但是KLMS算法由于受到系统非高斯冲击噪声的影响,稳态误差波动较大,其收敛性能大大降低,KLLAD算法要优于KLMS算法。图3是在第500次迭代时出现一个很大的非高斯冲击噪声,从图中可以看出:在500次迭代时该冲击噪声对KLLAD和LLAD算法并无影响,而KLMS算法在i=500时出现了较大的波动,产生了较大的误差,在非高斯冲击噪声消失后,KLMS算法又会收敛于一个较低的稳态误差,其结果更进一步验证了KLLAD算法的鲁棒性和KLMS算法的局限性,在有非高斯冲击的环境下KLLAD算法要远远优于KLMS算法。
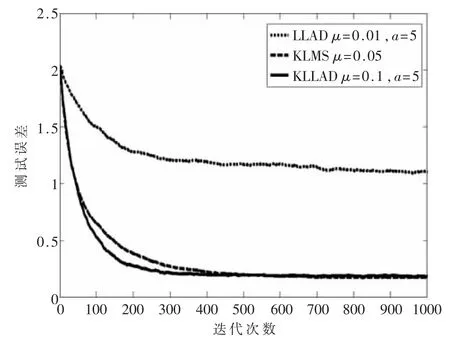
图1 无冲击噪声环境下的三种算法对比(pr=0)
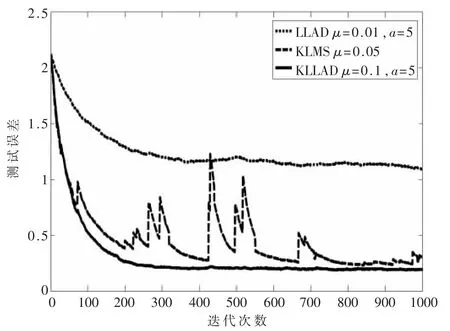
图2 有冲击噪声环境下的三种算法对比(pr=0.05,Ai=150)
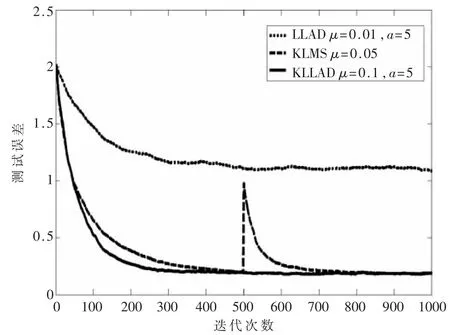
图3 在i=500有单点冲击噪声环境下的三种算法对比
4 结论
本文提出的核最小对数绝对差(KLLAD)算法是将最小绝对差(LLAD)算法与核方法相结合而形成的新的算法,由于 KLLAD算法使用对数作为代价函数,有效降低了测量误差 e(i)对算法更新迭代的影响[4],使算法更具稳定性,以此来解决存在非高斯冲击噪声的非线性问题,从系统辨识的实验仿真结果来看,在存在非高斯冲击噪声的环境里KLLAD算法与LLAD算法、KLMS算法相比,前者确实具有很好的鲁棒性和收敛性能。
[1]LIU W,PRINCIPLE J C,HAYKIN S.Kernel adaptive filtering:a comprehensive introdtion[M].Hoboken,NJ,USA:Wiley,2010.
[2]LIU W,POKHAREL P P,PRINCIPLE J C.The kernel least-mean-square algorithm[J].IEEE Trans.Signal Process.,2008,56(2):543-554.
[3]CHAMBERS J,AVLONITIS A.A robust mixed-norm adaptive filter algorithm[J].IEEE Signal Process.,1997,4 (2):46-48.
[4]SAYIN M O,VANLI N D,KOZAT S S.A novel family of adaptive filtering based on logarithmic cost[J].IEEE Trans. Signal Process.,2014,62(17):4411-4424.
[5]ARONSZAJN N.Theory of reproducing kernels[J].Trans. Amer.Math,Soc.,1950,68(3):337-404.
[6]BURGES C J C.A tutorial on support vecter machines for patten recognition[J].Data Min.Knowl.Disc.,1998,2(2):121-167.
[7]MIAO Q Y,LI C G.Kernel least-mean mixed-norm algorithm[C].ACAI.Xiamen:IET,2012:1285-1288.
[8]TANRIKULU O,CHANBERS J A.Convergence and steadystate properties of the least-mean mixed-norm(LMMN) adaptive algorithm[J].Proc.IEE-Vis.,Image&Signal Process.,1996,143(3):137-142.
[9]WALACH E,WIDROW B.The least mean fourth(LMF) adaptive algorithm and its family[J].IEEE Trans.Inform. Theory,1984,30(2):275-283.
Kernel least logarithmic absolute difference algorithm aganist impulsive noise
Lin Yun,Lei Yang,Zeng Junjun
(Chongqing Key Lab of Mobile Communication Technology,Chongqing University of Posts and Telecommunications,Chongqing 400065,China)
This paper presents a robust kernel adaptive filter algorithm,which combines the kernel space and the least logarithm absolute difference(LLAD)algorithm,it uses logarithm as its cost function to solve the impact on the convergence of algorithm which caused by the impulsive noise,then improve the anti-interference performance of the algorithm.Kernel least logarithm absolute difference(KLLAD)algorithm achieves the comparable convergence performance with the kernel least mean square(KLMS)algorithm while the KLLAD algorithm is robust against impulsive interference.The good performances in terms of robust and convergence performance are demonstrated in nonlinear system identification.
adaptive filter;system identification;robustness
TN911.72
A
10.16157/j.issn.0258-7998.2016.02.021
林云(1968-),男,博士,副教授,主要研究方向:MIMO技术及稀疏信号处理。
雷洋(1989-),通信作者,男,硕士研究生,主要研究方向:核自适应滤波器,E-mail:leiy1989@163.com。
曾俊俊(1991-),男,硕士研究生,主要研究方向:自适应滤波器。
中文引用格式:林云,雷洋,曾俊俊.抗冲击噪声的核对数最小绝对差算法[J].电子技术应用,2016,42(2):78-80,84.
英文引用格式:Lin Yun,Lei Yang,Zeng Junjun.Kernel least logarithmic absolute difference algorithm aganist impulsive noise[J]. Application of Electronic Technique,2016,42(2):78-80,84.
