基于不平路面汽车制动防抱死系统的参数设计
2016-11-15布仁杨风和于澎涛杨丽娟张翠
布仁+杨风和++于澎涛++杨丽娟++张翠清++韦丽珍

DOI:10.16661/j.cnki.1672-3791.2016.19.059
摘 要:制动防抱死系统通过基准加速度的变化来识别不平路面,并用两个指标来表示该种路面的不平程度:快指数和慢指数。快指数和慢指数主要会影响车轮的滑动率门限值,从而影响车辆在该不平路面上的性能,因此,提出了不平路面的快指数和慢指数的设计策略。
关键词:制动防抱死 快指数 慢指数
中图分类号:U463.5 文献标识码:A 文章编号:1672-3791(2016)07(a)-0059-02
汽车制动防抱死系统(Antilock Braking System,简称ABS),是汽车在制动过程中防止车轮抱死,从而保证汽车在制动过程中,保持方向稳定性及缩短制动距离,从而提高了汽车安全性。对于行驶中的汽车,采取制动时车轮抱死是非常危险的:若汽车前轮抱死,汽车将会失去转向能力;若汽车后轮先抱死,则汽车会出现甩尾、跑偏等现象,因此汽车在制动时,为了保证安全,不允许让车轮抱死。
目前汽车上安装的ABS,基本上是基于平直良好路面设计的,但是汽车行驶路面还有不平路面等多种路面条件。在这些路面上,人们依然采用这样的控制方法,会增加制动距离,行车安全性能下降。
1 研究内容
由于不同的车辆对同一种不平路面的响应不一样,而且相同的车辆对不同的不平路面的响应也不一样,所以在汽车制动防抱死系统开发中,该系统必须要准确地识别出该种不平路面,再进行参数标定,才能获得最佳的性能。
汽车制动防抱死系统通过基准加速度(基准加速度的定义是车轮轮心加速度与车辆加速度的差值,摘自于参考文献4)来识别不平路面,并用两个指标来表示该种路面的不平程度:快指数和慢指数。快指数是指基准加速度只要超过门限值,就对其增加量进行计算,否则递减直到零;慢指数是指基准加速度在一个周期内都超过门限值,才对其增加量进行计算,否则也进行递减直到零。快指数能够很快地响应每次单个跳跃事件,捕捉每一次的基准加速度,以最快的速度将路面的不平信息提供给制动防抱死系统;而慢指数则捕捉长期的路面特征,将一段时间内的路面的不平信息提供给制动防抱死系统。快指数或者慢指数的数值越大,表明该种不平路面的程度就越高。
所以,制动防抱死系统对不平路面的识别,主要是对两个指标的设计,并且这两个指标都影响车轮的滑动率门限值,从而影响车辆在该种不平路面的性能。如果这两个指标的设计太低,那车轮的滑动率门限值增量也较低,当车轮稍微有一点滑动率就将大于滑动率门限值, 制动防抱死系统就会对车轮进行卸压,车辆将损失制动减速度并增加制动距离,驾驶员就会感觉车辆无法停住;如果这两个指标的设计太高,车轮的滑动率门限值增量将加大,只有当车轮有比较大的滑动率甚至抱死时,制动防抱死系统才会介入并对车轮进行卸压,这将会导致车辆的转向能力变差甚至失去转向能力,并导致整车的稳定性变差甚至失去稳定性。因此,一套理想的设计参数,既可以获得比较高的制动减速度和比较短的制动距离,又可以获得比较好的转向能力和稳定性。
2 快指数和慢指数的设计
快指数设计的策略是:如果基准加速度大于正的快门限值,或者小于负的快门限值,都进行快指数的计算。否则,快指数进行递减,如图1所示。
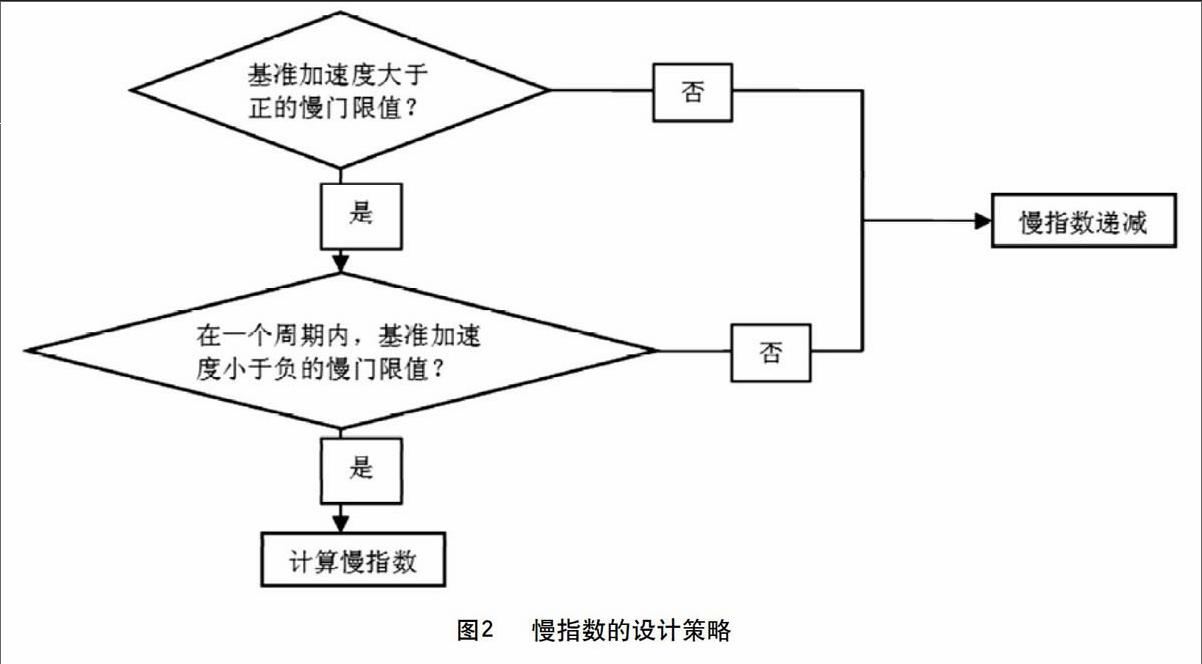
慢指数设计的策略是:在一个周期内,基准加速度必须大于正的慢门限值,同时也要小于负的慢门限值,才进行慢指数的计算,否则,慢指数进行递减,如图2所示。
3 结语
该论文是课题的研究阶段性成果,这是在沙石路面汽车传统ABS系统的缺陷及改进设想的基础上,提出的通过基准加速度的变化来识别不平路面,并用两个指标来表示该种路面的不平程度:用快指数和慢指数来表示。课题下一步准备编程及在实车上试验,得出准确数据,并进行对比优化,以用于实车。
参考文献
[1] 余志生.汽车理论[M].3版.机械工业出版社,2001:96-100.
[2] Scott Floyd.The ABS trim manual[Z].2003.
[3] Scott Floyd.The design of wheel slip threshold rough[Z].2004.
[4] Steve Keen.The design of wheel oscillation index[Z].2004.
[5] 布仁,李竟达.基于沙石路面汽车传统ABS系统的缺陷与完善[J].产业与科技论坛,2016(4):48-49.
