基于模糊理论的4WID电动轮汽车横向稳定性控制研究
2016-10-18刘秋生徐延海谭妍玮吴晓建
刘秋生,徐延海,2,谭妍玮,吴晓建
(1.西华大学汽车与交通学院,四川 成都 610039;2.汽车测控与安全四川省重点实验室,四川 成都 610039;3.湖南大学汽车车身先进设计制造国家重点实验室,湖南 长沙 410082)
基于模糊理论的4WID电动轮汽车横向稳定性控制研究
刘秋生1,徐延海1,2,谭妍玮1,吴晓建3
(1.西华大学汽车与交通学院,四川 成都 610039;2.汽车测控与安全四川省重点实验室,四川 成都 610039;3.湖南大学汽车车身先进设计制造国家重点实验室,湖南 长沙 410082)
为充分利用四轮独立驱动(4WID)电动轮汽车各轮驱动电机转矩独立可控及调节迅速的特点,对其横向稳定性控制问题进行研究。以车辆动力学理论为基础,基于动态仿真平台Matlab/Simulink建立包含“魔术公式”轮胎模型以及电机控制模型在内的九自由度整车闭环动力学系统。利用分层思想,上层运用模糊控制理论,分别设计以车身横摆角速度和质心侧偏角为控制变量的模糊控制器,并采用“当质心侧偏角较小时以理想横摆角速度跟踪控制为主,当质心侧偏角较大时以抑制质心侧偏角过大为主”的耦合协调控制策略产生所需附加主动横摆力矩。根据附加横摆力矩的大小,在下层分配设定一个阈值判断模块,通过判定选取效率车轮“差值驱动”及“差值驱动+差动制动相结合”的四轮驱动/制动协同分配模式来产生附加横摆力矩的方法对汽车失稳状态进行主动干预,最后在汽车典型的试验工况下进行稳定性控制的仿真测试。结果表明:采用的控制系统能够将质心侧偏角控制在稳定范围内,并能够很好地跟踪汽车的期望横摆角速度,提高电动轮汽车极限行驶工况下的横向稳定性。
4WID电动轮汽车;模糊控制理论;横向稳定性;主动横摆力矩控制
0 引 言
节能、环保、安全是汽车发展的三大主题,电动汽车因为能够有效缓解能源消耗、环境污染问题受到了越来越多的关注。而采用轮毂电机独立驱动的电动轮汽车因其独特的布置形式,相比其他形式的汽车拥有无法比拟的优势[1]。因其去除了传统汽车上的变速器、减速器、差速器等机械传动装置,不仅简化了整车结构,降低了整车质量,还避免了汽车不必要的机械损耗,极大地提高了汽车的工作效率,增加了汽车的续航里程[2-3]。
横向稳定性作为影响汽车高速安全行驶的一项重要性能,如何开发一套高效的汽车稳定性控制系统一直是国内外汽车企业和学者的研究热点。主动横摆力矩控制(AYC)通过轮胎纵向力主动分配侧偏力矩,实现车辆运动的直接横摆力矩控制,被认为是最具发展前景的汽车底盘控制系统[4-5]。传统的汽车横摆力矩控制采用对效率车轮差动制动实现,而4WID电动轮汽车各驱动电机转矩独立可控,且电机响应迅速准确,可直接控制驱动力产生附加横摆力矩来提高车辆行驶稳定,使汽车达到期望的运动状态[6-7]。
在电动轮汽车的稳定性控制方面,国内外许多学者进行了相关的研究。文献[8]针对四轮独立驱动-独立转向(4WIS-4WID)车辆的横摆稳定性进行了研究,基于滑模变结构控制设计了以横摆角速度和质心侧偏角为控制变量的差值驱动/制动的4WID电动汽车稳定性控制系统,滑模控制虽然在克服干扰等的鲁棒性较强,但设计的控制系统容易出现不可避免的抖振现象而影响控制效果。文献[9]针对四轮毂电机电动汽车的横摆力矩控制问题,基于模糊控制理论研究了横摆角速度和质心侧偏角联合控制的方法,但是在控制过程中仅仅考虑了控制变量的误差,没有考虑控制变量的误差变化率,从而使得精度下降。文献[10]也利用模糊控制对4WIS-4WID车辆的横摆稳定性进行了研究,虽然考虑了误差的变化率影响,但并没有利用驱动电机转矩独立可控的特点,而且没有具体对下层的力矩分配进行分析。由于汽车行驶工况复杂,采用传统的控制方法很难解决复杂的非线性问题。本文基于模糊控制理论,分别设计了以车身横摆角速度和质心侧偏角为控制变量的联合模糊控制器,下层通过设计一个阈值判断模块,并采用效率车轮“差值驱动+差动制动相结合”的分配方法来产生附加横摆力矩的方法对汽车失稳状态进行主动干预,最后在汽车典型的试验工况下进行了稳定性控制的仿真测试。
1 4WID电动轮汽车动力学模型
1.1整车动力学模型
建立的整车动力学模型既要真实反映汽车的动力学特性,又不使系统变得异常复杂,且形象化、简明化的物理模型有利于清晰地分析和验证所设计的控制器的有效性。因此,本文不考虑偏重于影响汽车平顺性的悬架系统的自由度,考虑影响汽车操稳性的主要影响因素,建立准确度较高的九自由度的整车动力学模型,如图1所示,具体包括汽车沿X轴的纵向运动,沿Y轴的横向运动,绕Z轴的横摆运动及绕X轴的侧倾运动,还有4个车轮绕各自轴线的旋转运动及1个前轮转向自由度。

图1 整车动力学模型示意图
汽车的纵向运动方程:

汽车的横向运动方程:

汽车的横摆运动方程:

车身侧倾运动方程:

车轮运动方程:

图和式中:Fxi、Fyi、Fzi——地面作用于车轮的纵向力、横向力及垂直载荷(i=1,2,3,4);
∑Fx、∑Fy——汽车受到的纵向合力、横向合力,由地面作用于车轮的纵向力及横向力合成得到;
∑Mz——横摆方向受到的横摆力矩;
δf——前轮转向角;
ν——车速;
νx、νy——汽车的纵向速度、横向速度;
m——整车质量;
ms——簧载质量;
σ——道路的坡度角;
Cd——空气阻力系数;
A——迎风面积;
ρa——空气密度;
a、b——汽车质心到前轴、后轴的距离;
hg——车身质心高度;
e——质心到侧倾中心距离;
d——前后轮轮距;
Ix、Iz、Ixz——簧载质量绕X轴、Z轴的转动惯量和惯性积;
Iw——车轮的转动惯量;
φ、φ˙、φ¨——车身侧倾角、侧倾角速度、侧倾角加速度;
β——质心侧偏角;
wr——车身横摆角速度;
Kφ、Cφ——悬架的等效侧倾刚度和阻尼;
Tmdij——电机传递到车轮的驱动转矩;
Vwij、wij——各车轮纵向速度、转速;
ΔM——主动干预的附加横摆力矩,由四驱动车
轮通过调节纵向驱动力产生,即ΔM=(Fx2-Fx1+ Fx4-Fx3)·d/2;
ΔM′——附加横摆力矩传递到车轮的转矩。
1.2轮胎模型
轮胎模型在汽车操纵稳定性的研究中起着至关重要的作用,不论是加速还是制动,维持其横向稳定性的力均来自轮胎与地面的附着力。“魔术公式”轮胎参数较少,仅用一个公式就能完整表达出轮胎纵向力、侧向力以及回正力矩,且各参数的物理意义明确,能较好地模拟轮胎在各种工况下的轮胎特性[11]。因此,本文选用“魔术公式”轮胎模型进行了电动轮汽车横向稳定性的仿真研究,其具体表达式为

式中:Y——轮胎纵向力或横向力;
x——纵向滑移率或侧偏角;
C——曲线形状因子;
D——峰值因子;
B——刚度因子;
E——曲线曲率因子;
Sν——曲线垂向漂移。
以上参数的值都根据车轮载荷确定,具体公式参考文献[12]。图2为仿真时所采用的轮胎特性图。

图2 轮胎特性图
1.3电机模型
本文所研究的汽车采用了4个大功率永磁无刷直流轮毂电机进行独立驱动,当它运行时,整车控制通过接收加速踏板的目标驱动力矩信号Tedij,并向电机控制器发出指令输出电磁转矩Teij以驱动车轮,由于电机与车轮直接联接,假设不计转矩损耗,即传动效率为100%,其中电机系统数学模型描述[13]为

式中:Teij——电磁转矩;
TLij——负载转矩;
Jwij——电机轴和车轮转动惯量;
wij——电机转速;
Km——转矩系数;
Ke——反电动势系数;
iaij——电机电流;
R——电枢电阻;
La——电机电感;
Eij——输入电压;
r——电机粘性摩擦系数。
电机转矩采用常规PI控制,设定比例系数Kp和积分系数Ki,产生电机输入端电压Eij为

2 稳定性控制系统的设计
2.1控制变量的选取及其理想值的确定
稳定性控制系统主要控制汽车按照驾驶员的预定轨迹行驶,保证其行驶的稳定性。行驶轨迹主要由汽车行驶的航向角φ决定,它由质心侧偏角和横摆角速度两部分组成:

其中,横摆角速度wr主要侧重汽车稳定性问题的描述,它反映汽车行驶中航向角变化过程的快慢,决定汽车的转向特性;质心侧偏角β则侧重汽车轨迹保持问题的描述,反映汽车转向过程中与预定轨迹的偏离程度[14]。因此,这两变量能较好地反映汽车行驶的稳定程度。
线性二自由度汽车模型没考虑轮胎的非线性及忽略转向、悬架系统的影响,并视汽车沿X轴的前进速度为定值,使其只有沿Y轴的横向运动与绕Z轴的横摆运动这两个自由度,此时汽车行驶完全处于线性区域,较好地反映汽车稳定的行驶状态及驾驶员驾驶意图[15]。因此,选取此模型作为本文的参考模型,其微分方程为

当汽车进入稳态时,横摆角速度wr为定值,此时代入式(12)得到稳态时的横摆角速度和质心侧偏角:

式中:L——轴距,L=a+b;
kf、kr——汽车前轴、后轴的侧偏刚度;
K——稳定性因子。
上述参考值并没有考虑路面附着条件限制,而实际汽车转向过程侧向加速度受到路面附着条件的限制,即ay=wr·νx≤μ·g,则得到最大横摆角速度:

综合式(13)、式(14)得到修正后的理想横摆角速度:

由式(13)质心侧偏角与横摆角速度的比例关系,得到修正后的理想质心侧偏角:

2.2模糊控制器的设计
模糊控制能够克服非线性因素的影响,对调节对象的参数变化具有较强的鲁棒性,非常适用于汽车稳定性控制的研究[15]。运用模糊控制理论,分别设计了以横摆角速度和质心侧偏角为控制变量并考虑其误差变化率的模糊控制器,并对各自输出控制量选取合适的权值进行加权计算,得到维持汽车稳定所需的附加横摆力矩。
2.2.1横摆角速度控制
该控制器采用双输入-单输出形式,以横摆角速度实际值与理想值之间的偏差ewr及偏差的变化率e˙wr为输入变量,输出以横摆角速度为控制变量的附加横摆力矩ΔMwr。并均定义模糊子集{PB,PM,PS,ZE,NS,NM,NB},即{正大,正中,正小,负小,负中,负大}来描述输入量和输出量。各变量采用均匀分布的三角形隶属度函数,该函数运算简单,能满足控制精度的要求。根据实际需要,设定e,e˙模糊论域均为[-6,6];ΔMz模糊论域为[-0.8,0.8]。具体的变量模糊子集论域范围以及隶属度函数定义如图3所示。

图3 输入-输出变量的论域范围及隶属度函数
控制规则作为模糊控制器的核心,主要由专家经验和仿真试验合理确定。如当横摆角速度的偏差e为NB时,表示横摆角速度实际值远小于其理想值,为了尽快消除误差使横摆角速度增大,应对车辆施加一个正的横摆力矩,即ΔMz应取P;且当偏差的变化率e˙为NB时,偏差有增大的趋势,为使偏差减小,应对汽车施加一个较大的正的横摆力矩,因此输出ΔMz应取PB。同理可得其他规则的确定。模糊控制规则如表1所示。

表1 横摆角速度控制器的模糊规则
2.2.2质心侧偏角控制
设计以质心侧偏角为控制变量的模糊控制器是为了使汽车实际质心侧偏角尽可能小。同样采用双输入-单输出形式,以质心侧偏角实际值与理想值之间的偏差eβ及偏差的变化率e˙β为输入变量,输出以质心侧偏角为控制变量的附加横摆力矩ΔMβ。同样定义输入、输出量模糊子集为{PB,PM,PS,ZE,NS,NM,NB},且采用三角形隶属函数。定义其变量论域范围和隶属度函数同上述横摆角速度控制一致,只需改变输入时的量化因子使其与模糊论域范围匹配。根据ΔMβ与β的关系,得到以质心侧偏角为控制变量的模糊控制规则如表2所示。

表2 质心侧偏角控制器的模糊规则
设计应用Matlab软件的FIS控制箱,采用Mandani型推理方法,并用面积中心法进行模糊后的清晰化运算。分别将控制器输出u经过合适比例因子的放大后形成ΔMwr、ΔMβ。
2.2.3加权模块设计
为消除横摆角速度与质心侧偏角的耦合影响,采取“当质心侧偏角较小时以理想横摆角速度跟踪控制为主,当质心侧偏角较大时以抑制质心侧偏角过大为主”的耦合协调控制策略,按照|β|的大小计算出横摆角速度控制器和质心侧偏角控制器的输出量ΔMwr、ΔMβ加权的权重系数,分别记为P和1-P,进而得到维持汽车横向稳定所需的附加横摆力矩。根据稳定性和|β|的关系,定义两个临界系数β0和β1,设计P的表达式为

最终得到联合模糊控制器的输出控制量ΔMz的大小:

2.3下层附加横摆力矩的驱动/制动力矩协同分配
模糊控制器决策出的附加横摆力矩最终需通过下层驱动力/制动力的分配实现,传统车辆基本采用效率单轮或侧轮差压制动的方法产生附加横摆力矩;而研究的电动轮汽车与传统车辆在控制上有很大的不同,它可控制效率单轮或侧轮电机驱动力矩的增减产生,也可采用传统车辆的差动制动方法。
利用电动轮汽车驱动电机转矩独立可控且响应迅速的特点,设计采用差值驱动产生附加横摆力矩的方法,但驱动电机峰值转矩有限,当需求的附加横摆力矩较大时,采用单纯的差值驱动分配方法不足于产生,此刻则需要结合差动制动分配的方法。基于此,本文设计了图4的主动横摆力矩稳定性控制系统。图中采用分层方法,上层控制器进行主动横摆力矩的决策,下层控制器则负责对其进行分配。根据横摆角速度的偏差进行判断失稳情况,当它小于设定的阈值X1时系统处于较平稳状态不进行主动干预,而当大于阈值X1时则需采取主动干预。结合模糊控制器决策出的附加横摆力矩ΔMz的大小设定另一个阈值X2,当ΔMz<X2时说明需要的附加横摆力矩较小,此时只通过实现较为迅速的差值驱动分配方法即可产生;当ΔMz>X2时说明需要的附加横摆力矩较大,必须结合驱动/制动协同分配的方法,一边通过迅速实现的差值驱动先缓和汽车不稳定状态,并同时采取反应时间稍长但效率较高的差动制动的方法,拓展系统的稳定域,其中驱动/制动协同分配规则见表3。
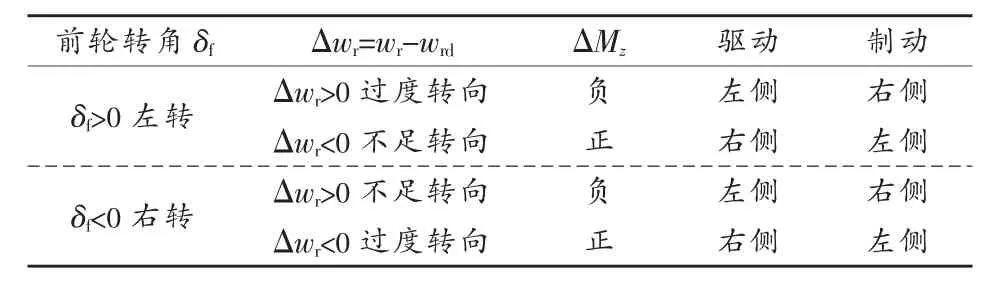
表3 附加横摆力矩的驱动/制动协同分配规则

图4 4WID电动轮汽车主动横摆力矩控制系统
3 仿真与分析
为验证所设计的控制系统的有效性,借助Matlab/Simulink所建立的包含九自由度4WID电动轮汽车非线性模型作为实际控制对象进行仿真测试,并给出汽车及电机模型的参数如表4所示。双移线试验常用于表现车辆在超车、躲避障碍物时的横向稳定性,反映车辆快速大角度转向的能力,能较为全面地评价车辆的操纵稳定性和行驶安全性,本文参照ISO-3888-1——1999[16]试验标准建立双移线工况通道进行双移线试验仿真。仿真条件设置为:假设路面水平,车速100 km/h,路面附着系数为0.6,其中图5为给定的方向盘转角输入。给出所涉及的控制参数:wr控制器的量化因子kwr=9.52及kdwr=0.86,比例因子ku1=1000;β控制器的量化因子kβ=8.45及kdβ=7.5,比例因子ku2=1000;权值计算参数β0=2,β1=5。这里需要说明的是,尽管各轮驱动电机转矩独立可控,但各轮电机会存在同步性及响应滞后性的问题,所以本文假设在对某侧轮施加驱动力矩调节汽车失稳状态时,各轮处于同步进行状态,且各电机的响应虽有滞后性,但反应时间一般很短,相比常规汽车液压制动系统的响应滞后性显得更为迅速,所以在调节汽车失稳时利用电机转矩调节显得更有优势。

表4 汽车及电机模型参数

图5 方向盘转角输入
得到仿真结果如图6~图14所示。

图6 行驶轨迹对比

图7 横摆角速度对比
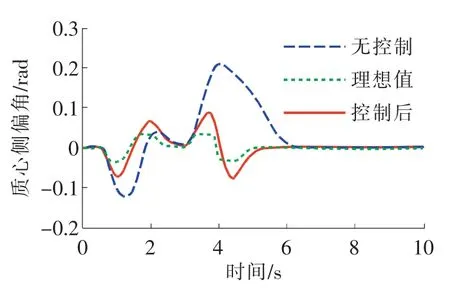
图8 质心侧偏角对比

图9 侧向加速度对比

图10 质心侧偏角与横摆角速度对比

图11 控制决策出的附加横摆力矩

图12 驱动/制动力矩附加变化情况

图13 车轮载荷变化

图14 车轮滑移率变化
从图6可看出:无控制时汽车侧向位移出现较大的偏差,表明汽车已经产生了严重的侧滑失稳;而有控制时汽车能够完全按照预定的双移线工况通道行驶,侧向轨迹保持能力显著增强。从图7~图9看出:无控制时汽车在4s开始,横摆角速度、质心侧偏角和侧向加速度已经失去了跟踪能力,出现了较大的波动,此时车辆失稳严重;经过主动横摆力矩的干预后,横摆角速度能够很好地跟随期望值并抑制了过大质心侧偏角的出现,且侧向加速度也得到大幅度减小,保持汽车转向过程的行驶稳定性。
图10的相位图看出控制后的汽车的横摆角速度和质心侧偏角处在可控范围之内,系统处于稳定状态;图11和图12给出了双移线行驶工况下利用控制决策的附加横摆力矩变化曲线以及驱动/制动力矩变化曲线,可看出:由于决策出附加横摆力矩较大,利用电机驱动力矩的差值不足于产生,所以经过下层阈值判定模块判断后,进而切换到“驱动/制动力矩的协同作用模式”进行下层力矩的分配,对左侧车轮进行驱动而对右侧车轮进行制动。其中制动/驱动变化曲线基本与附加横摆力矩的变化趋势一致,这里假设前后轴各分担0.5倍的ΔMz,其中驱动侧分担制动侧的0.5倍。图13为整个驱动/制动变化过程中车轮载荷变化曲线,可以看出汽车在转向行驶中由于质心的左右、前后转移导致了4个车轮的垂直载荷也发生转移和变化,轮载的变化会影响到轮胎的附着能力,从而间接地影响汽车的行驶稳定性。从图14看出驱动/制动过程中滑移率在0~0.0025之间变化,说明行驶过程车轮滑动成分所占的比例较小,即滑移率处于一个理想的变化范围,从而有较大的侧向力系数,说明轮胎保持转向、防止侧滑的能力也较大,横向稳定性增强。
4 结束语
1)基于动态仿真平台Matlab/Simulink建立了包含“魔术公式”轮胎模型以及电机控制模型的九自由度整车动力学仿真模型,用于4WID电动轮汽车的横向稳定性控制研究。
2)分别设计了以车身横摆角速度和质心侧偏角为控制变量且考虑其误差变化率的模糊控制器,并采用 “当质心侧偏角较小时以理想横摆角速度跟踪控制为主,当质心侧偏角较大时以抑制质心侧偏角过大为主”的耦合协调控制策略,产生汽车稳定所需的附加横摆力矩。
3)根据附加横摆力矩的大小,设定一个阈值判断模块,采用效率车轮“差值驱动”或“差值驱动+差动制动相结合”的四轮驱动/制动力协同分配模式来产生附加横摆力矩的方法,拓展了系统的稳定域。
4)根据上层设计的联合控制器以及下层力矩分配方法在搭建的4WID电动轮汽车模型进行仿真测试验证,结果表明设计的控制系统能较好地提高电动轮汽车极限行驶的横向稳定性。
[1]李刚,宗长富.四轮独立驱动轮毂电机电动汽车研究综述[J].辽宁工业大学学报(自然科学版),2014,34(1):47-52.
[2]柴健,李旭宇,陈刚,等.四轮独立驱动轮毂式电动汽车转向控制策略研究[J].公路与汽运,2014(164):1-5.
[3]WANG R G,ZHANG H,WANG J M,et al.Robust lateralmotioncontroloffour-wheelindependently actuatedelectricvehicleswithtireforcesaturation consideration[J].Journal of the Franklin Institute,2015,252(2):645-668.
[4]玄圣夷,白海英,宋传学,等.基于门限自调整的车辆主动横摆力矩PD控制策略研究 [J].汽车技术,2010(11):17-20.
[5]NOVELLIS L D,SORNIOTTI A,GRUBER P,et al. Directyawmomentcontrolactuatedthroughelectric drivetrainsandfrictionbrakes:Theoreticaldesignand experimental assessment[J].Mechatronics,2015(26):1-15.
[6]张金柱,张洪田,孙远涛.电动汽车稳定性的横摆力矩控制[J].电机与控制学报,2012,16(6):75-80.
[7]林程,彭春雷,曹万科.独立驱动电动汽车稳定性的滑模变结构控制[J].汽车工程,2015,37(2):132-138.
[8]张聪,王振臣,程菊,等.4WIS-4WID车辆横摆稳定性AFS+ARS+DYC滑模控制[J].汽车工程,2014,36(3):304-310.
[9]李刚,王超,石晶.四轮轮毂电机电动汽车横摆力矩控制研究[C]∥中国汽车工程学会年会,2014:29-33.
[10]杨福广,阮久宏,李贻斌,等.4WID-4WIS车辆横摆运动AFS+ARS+DYC模糊控制[J].农业机械学报,2011,42(10):6-12.
[11]张安静.汽车稳定性控制系统仿真研究[D].成都:西华大学汽车与交通学院,2014.
[12]郑香美,高兴旺,赵志忠.基于“魔术公式”的轮胎动力学仿真分析[J].机械与电子,2012(9):16-20.
[13]宗长富,刘经文,郑宏宇,等.4WID/4WIS电动车建模和特殊工况仿真[J].汽车工程,2011,33(10):829-833.
[14]夏长高,李心庆,郑恩瑞.主动横摆控制在车辆横向稳定性中的应用研究[J].机械设计与制造,2015(4):35-43.
[15]NAM K,FUJIMOTO H,HORI Y.Design of an adaptiveslidingmodecontrollerforrobustyaw stabilisation of in-wheel-motor-driven electric vehicles[J]. International Journal of Vehicle Design,2015,67(1):98-113.
[16]Passengercarstesttrackfora severe lane-change maneuver Part1:Double-lane change:ISO-3888-1——1999[S].1999.
(编辑:刘杨)
Study on lateral stability control of 4WID electric-wheel vehicle based on fuzzy theory
LIU Qiusheng1,XU Yanhai1,2,TAN Yanwei1,WU Xiaojian3
(1.School of Transportation and Automotive Engineering,Xihua University,Chengdu 610039,China;2.Sichuan Key Laboratory of Automotive Control and Safety,Chengdu 610039,China;3.The State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body,Hu’nan University,Changsha 410082,China)
This paper involves the study of the lateral stability control of 4WID electric-wheel vehicle to fully employ the independent controllability and rapid adjustment of each wheel’s driving motor torque.A nine-DOF dynamic closed-up vehicle system,including a“magic formula”tire model and a motor control model,was established with the theory of vehicle system dynamics and the simulation software Matlab/Simulink applied.Based on the layered method and the fuzzy control theory,the upper layer was designed with fuzzy controllers that used body yaw rate and the sideslip angle as controlled variable.The desired additional active yaw moment was produced by using the coupling and coordinated control strategy that when the sideslip angle is small,the focus is chiefly on the tracking control of the desired yaw rate;when it is large,the focus is mainly on the suppression of excessive sideslip angle.According to the desired additional yaw moment,a threshold determination module was set in the lower distribution control layer,by which the mode that an efficiency wheel combined with“differential drive”or“differential drive anddifferentialbrake”wheeldrive/brakeforcedistributionwasdeterminedandselectedto generateadditionalyawmomenttointerveneactivelywithvehicleinstability.Finally,the simulation test of stability control was conducted under typical vehicle test conditions.The results show that the control system can confine the sideslip angle within a stability range,and at the same time can efficiently track the desired vehicle yaw rate so as to improve the lateral stability of electric-wheel vehicle in extreme driving conditions.
4WID electric-wheelvehicle;fuzzy controltheory;lateralstability;activeyaw moment control
A
1674-5124(2016)06-0104-08
10.11857/j.issn.1674-5124.2016.06.023
2015-10-10;
2015-12-26
教育部春晖计划资助项目(Z2013024);四川省新能源汽车电控技术创新支撑项目(15203559);四川省科技厅重点资助项目(2011J00043);西华大学研究生创新基金项目(ycjj2015034)
刘秋生(1989-),男,江西赣州市人,硕士研究生,专业方向为整车性能测试与仿真。
徐延海(1970-),男,湖北黄冈市人,教授,博士,研究方向为整车性能测试与仿真。
