可调螺距螺旋桨模糊控制系统的分析及应用
2016-10-14张亚东
张亚东,徐 静
可调螺距螺旋桨模糊控制系统的分析及应用
张亚东1,徐 静2
(1. 中海油田服务股份有限公司,北京101149;2. 辽宁省朝阳供电公司,辽宁122000)
对可调螺距螺旋桨控制系统的进行了分析,给出了模糊控制在可调桨控制系统在螺距调节时的应用,具有很好的实际应用价值。
可调桨 PID控制 模糊控制
0 引言
可调螺距螺旋桨(简称CPP 或调距桨),即是通过装置于桨毂中的执行机构,使得桨叶旋转而调节螺距的螺旋桨[1]。与定距桨比较,调距桨的桨叶角度(螺距角)可以调节,这就使得船舶的推力方向、大小可以在一定区间内可调节,改善了船舶在不同工况下的操纵性能和推进效率。可调距对控制器的要求也更为复杂和精确。
和传统的控制理论相比,人们往往将控制器构造在被控制的对象十分精确的数学模型为依据的。相反的是,现实所遇到的情况中系统多数是复杂的,具有强非线性化、干扰性强、具有时变性、且具有时滞性和强耦合等特性。而船舶的运动就是这样一种情形,由于船、机、桨三者互相耦合,所有船舶是具有非线性和大滞后的对象。这类系统所固有的复杂性、模糊性和其他的因素影响,采用精确的数学模型的传统控制理论已经很难生效,而模糊控制可以为这类系统更优化的解决方式。
1 可调桨的控制系统的分析
在当今船舶调距桨控制应用领域, PkD控制方式被广泛应用。随着船舶自动化水平提升和机动性增强,该控制方式越来越显现出其只能适用于特殊工况的局限性。当可调桨的运行条件发生改变时,PkD控制方式所设置的参数不能随意更改,因此往往控制效果并不良好。基于这些因素考虑,依据模糊控制方式在其他实际控制系统中的成功应用的控制算法和经验加以调整,应用在调距桨控制系统上,使其可以适用于各种复杂运行工况。普遍的可调距桨系统的控制结构如下图1所示。
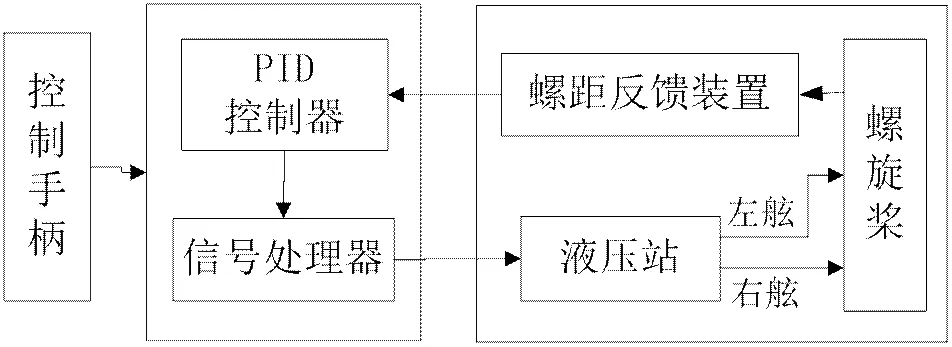
图1可调桨控制结构示意图
由于可调桨螺距的控制是十分复杂的过程,所以很难建立精确的数学控制模型。而类似于人类语言信息的模糊控制,有着类似人类的思维,易于理解,设计也更为灵活,且其维护方便。拥有模糊信息的控制规则的控制器(模糊控制器),其控制系统与常规控制系统相比,鲁棒性和稳定性强。由于常规的控制系统仅仅通过调节参数来改善控制效果,而模块控制系统能够改变控制规则、推理方式、隶属度函数和决策判定来修正控制系统特性。所以在设计、维修和调整性上模糊控制器更为简单。在常规控制算法中,微小的错误和参数漂移都可能引起系统失控,而基于控制规则的模糊控制系统对某一规则的变化敏感的很小,系统抗干扰能力强[3]。
2 可调桨的模糊控制系统的应用
通过对调距桨的螺距变化过程的分析,螺距大小的变化是决定性的关键参数,螺距的改变对应着一定时间段内恒转速情况下螺旋桨的推力值变化。但是在调距桨推力值的变化和螺距变化并不是线性变化过程,因此对螺距的控制可以采取分段控制方式。
设螺距为P,其误差为e,误差的变化率用微分ė来表示。依据被控对象的系统误差及误差的变化趋势来消减误差的模糊原理,建立以e和ė为输入的两输入单输出的模糊控制器。
依据对隶属度函数采取三角形的结构原理,将螺距误差e和螺距的误差微分ė均规划成7个变量的等级(NB,NM,NS,Z,PS,PM,PB)。
通过常见的控制原理结合在实际应用的经验,可以总结出如下表所示的控制规则。
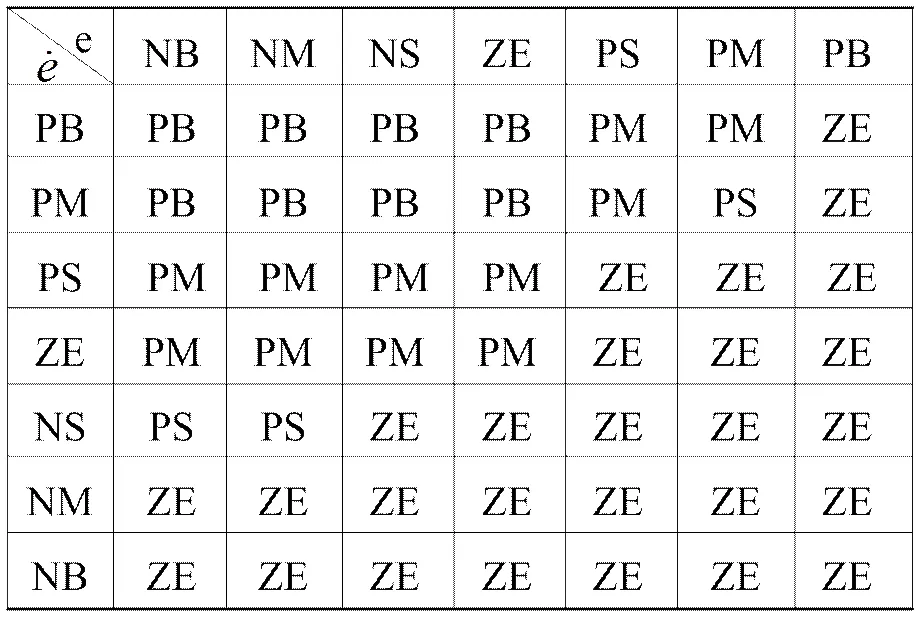
表1 模糊控制规则表
采用重心法来精确处理输出量,分析输出量规则,使用离线计算方式处理输出量,可以得到优化后的控制表。通过模糊量化处理在实际应用中采样的数据,再结合查表可以得出输出量。
可调桨螺距的某段控制过程中,稳态时ABS(△P)<1º。
分析可调桨的螺距控制过程,输入量是影响输出量的主要因素,因此可以将其他变量视为干扰量。而在上述变量范围内,在相邻螺距变化区间的耦合情况最为严重。
可以将每段螺距范围设计为单输入单输出的单通道模糊控制器,计算出输出Uk;然后将其他段螺距控制通道的耦合作用当作干扰。基于剔除干扰的影响处理,可以对相邻的螺距控制通道采用一个模糊补偿做解耦处理。如下:
分析k段螺距控制的控制过程,分析干扰因素,可以得知第k-1段和k+1段对其影响(最后一段没有k+1段,第一段没有第k-1段),通过模糊补偿处理。用U′k,k-1和U′k,k+1分别来表示第k-1段和k+1段的干扰效果。这样第k段的螺距控制为:Uk=U′k+ U′k,k-1+U′k,k+1。
令各个螺距控制设定螺距分别为P1,P2,…,Pm;各控制区域的实际螺距分别为P′1(t),P′2(t),…,P′m(t),其中t为时间变量。运用模糊解耦补偿控制方法以及U′k,k-1和 U′k,k+1计算方法如下:
第一步将螺距控制过程区分分为m个区间,所以需要建立m个单变量模糊控制器。采用二维模糊控制器,输入为Ek(t)= Pk- P′k(t),ECk(t)= dEk(t)/dt。模糊控制器的输入及输出关系为ƒ(.),那么系统中单变量模糊控制器的输出为:
U′k=ƒ(Ek(t),ECk(t))
第二步设计解耦模糊控制器,计算该段的U′k,k-1和U′k,k+1,对于第k个螺距控制区,主要的耦合作用是因为从第k-1到k+1控制区的螺距改变,因此可以不考虑其他控制区的作用。
dk,k+1=(Pk+1- Pk)- (P′k+1-P′k)
即为第k+1区与第k区的设定螺距与实际螺距误差值之差
ek,k+1= P′k-P′k+1
即为第k+1区及第k的实际螺距之差,同理可以得知第k-1及第k区的关系。
dk,k-1=(Pk-1- Pk)- (P′k-1-P′k)
ek,k-1= P′k-P′k-1
于是,解耦模糊控制算法可描述如下
kf(dk,k+1and ek,k+1) then U′k,k+1
kf(dk,k-1and ek,k-1) then U′k,k-1
把隶属度函数分解为三角形,对dk、ek、U′k,k+1、U′k,k-1均划分为7个变量等级(NB,NM,NS,Z,PS,PM,PB)。
可以根据相关的试验总结推出模块控制推理表如表2。
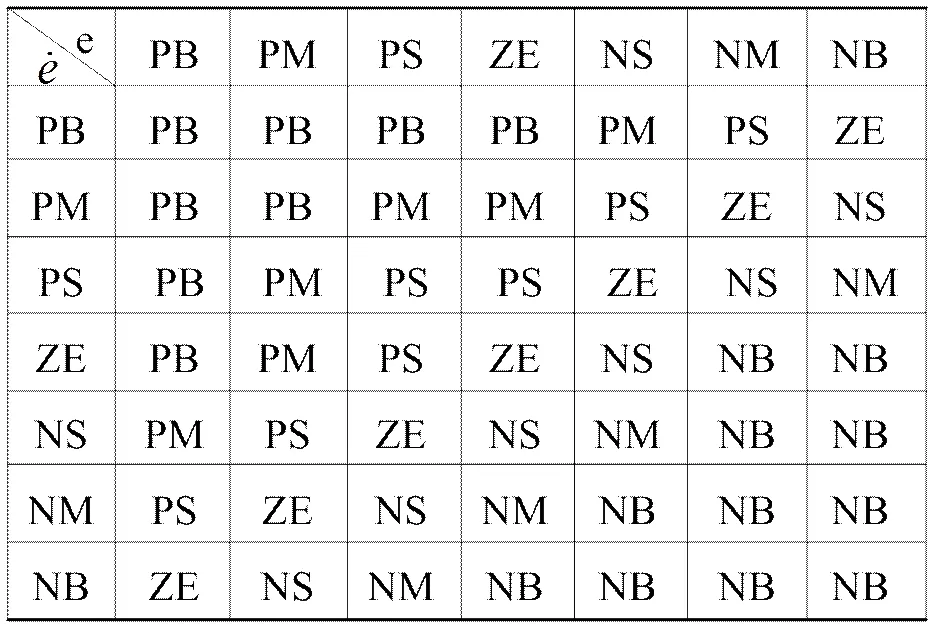
表2 模糊补偿规律表
目标区间螺距误差和前后区间螺距误差之间的差距用参数dk来表示,当参数dk为正时表示第k区间螺距的误差比前后区间大,则第k区间和相邻区间相比其模糊控制输出大;上一区间实际螺距和前后区间螺距实际值之差可以用参数ek来表示,当参数ek为正时表示第k区间实际螺距的误差比相邻区间实际螺距高,则第k区间的变化趋势会影响相邻通道螺距的变化。可以得出结论,当dk和ek越大,则第k区间的螺距控制补偿就要求越大;同理可知,若dk和ek越小,则第k区间的螺距控制补偿要求越小,即可满足上述规则。这些规则是符合人的思维和可调桨螺距控制对象的物理意义的。可以根据模糊控制语言做出判断:
kf(dk,k+1ks PB and ek,k+1ks PB) then U′k,k+1ks PB;
kf(dk,k+1ks NB and ek,k+1ks NB) then U′k,k+1ks NB;
kf(dk,k-1ks PB and ek,k-1ks PB) then U′k,k-1ks PB;
kf(dk,k-1ks NB and ek,k-1ks NB) then U′k,k-1ks NB;
第三步:对模糊控制器进行解耦得出输出值Uk:
Uk=U′k+ U′k,k-1+U′k,k+1
当前段作为是第一段时则
Uk=U′k+U′k,k+1
当前段作为最后一段时则
Uk=U′k+ U′k,k-1
将上述算法中的U′k,k-1和 U′k,k+1设解耦项,可以由模糊算法得出解耦补偿控制。模糊控制器的解耦处理由对应的算法完成,相应的处理方式如图2所示。
结束语
从采用模糊控制对调距桨的桨角控制分析来看,模糊控制可以有效地改善系统的动态控制特性,减小调节的时间和提高控制精度。在船舶可调桨的应用上,模糊控制策略能够适用于各种复杂的条件,具有良好的市场推广前景。
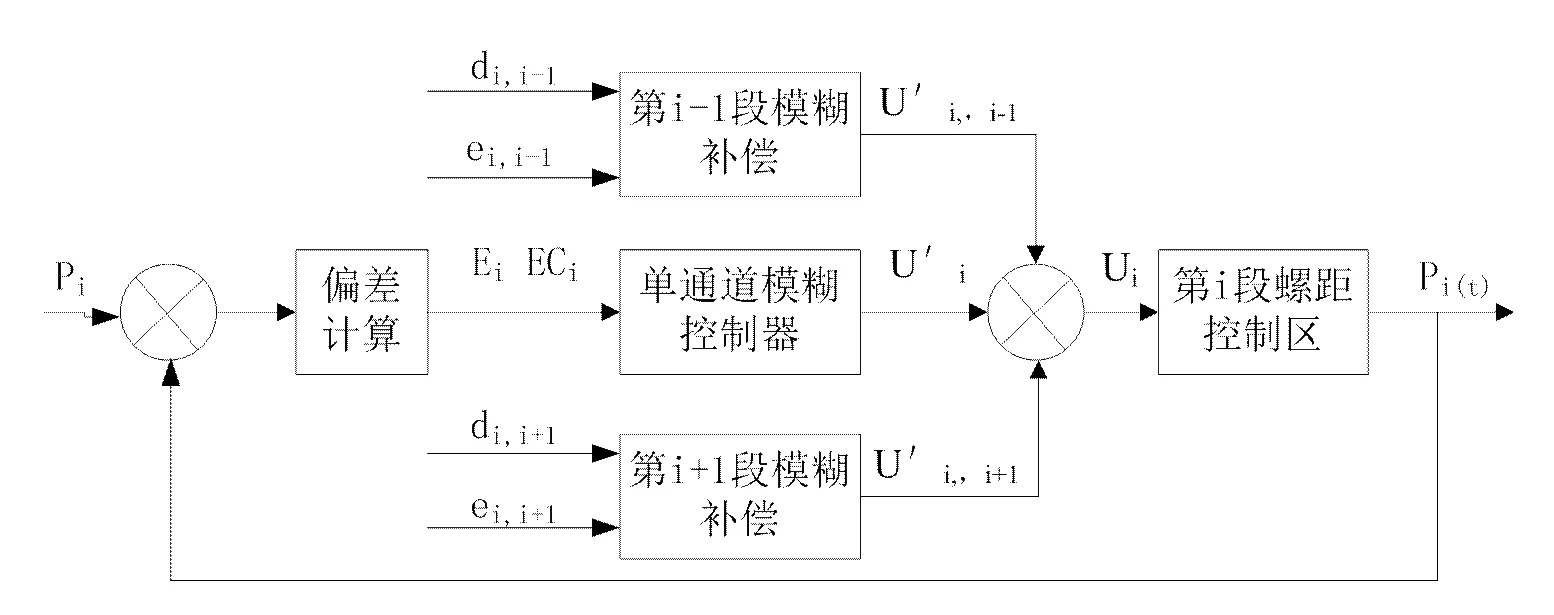
图2 可调桨螺距控制模糊解耦控制器结构示意图
[1] 庞 涛, 何祖军, 孙明平. 可调螺距螺旋桨推进特性分析及控制系统研究[J]. 计算机测量与控制, 2006. 14(2): 188-190.
[2] 高 健, 李 众, 石建华, 等. 可调螺距螺旋桨模糊控制系统[J]. 船舶工程, 2000(1): 32-34, 48.
[3] 彭勇刚. 模糊控制工程应用若干问题研究[D]. 浙江大学. 2008: 104-113.
[4] 吴东兴, 李 众, 李 彦. 可调螺距螺旋桨船舶航速模糊控制系统[J]. 华东船舶工业学院学报, 2001(6): 25-28.
Analysis and Application of Fuzzy Control for Controllable Pitch Propeller
Zhang Yadong1, Xu Jing2
(1. China Oilfield Services Limited , COSL, Beijing 101149, China; 2. Chaoyang Electric Power Company, Liaoning 122000, China)
The controllable pitch propeller control system are analyzed, and fuzzy control is given when the adjustable blade control system in pitch control applications. The result is of valuepractical application.
adjustable paddle; PID control; fuzzy control
TP273
A
1003-4862(2016)04-0007-03
2015-11-04
张亚东(1974-),男,工程师。专业方向:海洋工程装备。
