一种车载激光捷联惯组免拆卸标定方法
2016-10-14赵晓伟孙谦李宏陈令刚邓志宝
赵晓伟,孙谦,李宏,陈令刚,邓志宝
(北京航天发射技术研究所,北京100076)
一种车载激光捷联惯组免拆卸标定方法
赵晓伟,孙谦,李宏,陈令刚,邓志宝
(北京航天发射技术研究所,北京100076)
陀螺和加速度计常值零偏随时间变化,惯组误差增大,不满足部队使用要求。传统方法是将激光捷联惯组从载车上拆卸下来放在高精度三轴转台上重新标定,过程繁琐费时、成本高,不利于部队的使用和快速反应。设计了一种激光捷联惯组免拆卸标定方法,在载车进行四位置转位,每个位置静止10min的条件下对陀螺和加速度计零偏误差进行了全局可观测性分析,证明了陀螺常值零偏和水平加速度计常值零偏是可观测的。利用Kalman滤波器估计了三只陀螺和水平加速度计常值零偏。对标定补偿前后激光捷联惯组的全方位对准精度和1h导航精度进行了比较。结果表明:基于载车四位置转位免拆卸标定方法对陀螺和加速度计常值零偏估计是有效的。
激光捷联惯组;四位置转位;免拆卸标定;零偏估计
0 引言
激光捷联惯组在完成出厂标定一段时间(一般是1年)后,陀螺常值漂移和加速度计常值零偏相对出厂标定值产生差异,激光捷联惯组无法再满足初始对准、导航精度要求。解决以上问题的传统方法是将激光捷联惯组从载车上拆卸下来放在高精度三轴转台上重新标定,该方法成本高,标定过程繁琐、费时,不利于部队的快速反应[1-2]。因此,提出了一种基于载车四位置转位的免拆卸标定方法,采用全局可观测性方法[3]分析了陀螺和加速度计常值零偏误差的可观测性,设计了零偏常值误差估计的Kalman滤波器,对零偏常值误差进行了有效估计。
1 理论分析
1.1误差模型
激光捷联惯组在三轴转台上的传统标定方法与基于载车四位置转位的免拆卸标定方法是在不同的误差模型基础上进行的,传统标定方法是利用地速和重力加速度在地理坐标系上的分量作为观测量,用最小二乘法辨识出模型参数。建立三轴转台上传统标定方法的误差模型,加速度计线性标定模型如式(1)所示,陀螺的标定模型如式(2)所示。

式(1)中,fb为惯性测量单元载体坐标系下的比力矢量;,其中K1=diag([KAXKAYKAZ]T),KAX、KAY、KAZ分别为三只陀螺的刻度系数,为由三只加速度计输入轴组成的坐标系OXaYaZa与载体坐标系OXbYbZb的坐标转换矩阵;Δb为载体坐标系下的等效加计零偏矢量;NA为三只加速度计的实际采样数据矢量。

式(2)中,ωb为地速在载体坐标系下的矢量;其中KGX、KGY、KGZ分别为三只陀螺的刻度系数,为由三只陀螺输入轴组成的坐标系OXgYgZg与载体坐标系OXbYbZb的坐标转换矩阵;εb为载体坐标系下的等效陀螺零偏;NG为三只陀螺的实际采样数据。
载车四位置转位免拆卸标定方法是以导航误差(包括位置误差、速度误差及姿态误差)作为观测量对系统误差参数进行辨识,载车四位置转位标定误差模型如下。
在东北天地理坐标系下,激光捷联惯组在静态条件下单位置初始对准,初始对准结束后水平姿态对准误差如式(3)、式(4)所示,方位对准误差如式(5)所示[4]。

式(3)、式(4)、式(5)中,δα为俯仰角对准误差,δβ为横滚角对准误差,δγ为方位角对准误差,BE为等效东向加计零偏,BN为等效北向加计零偏,g是重力加速度,DE是等效东向陀螺零偏,Ω是地球自转角速度,L为地理纬度。
1.2可观测性分析
参数可观测是参数正确估计的前提,激光捷联惯组的参数估计需要可观测性分析。利用全局可观测性分析方法,分析载车在四位置转位过程中三只陀螺常值零偏和水平加表常值零偏的可观测性问题,具体如图1所示。在全局可观性分析时可以忽略噪声的影响。
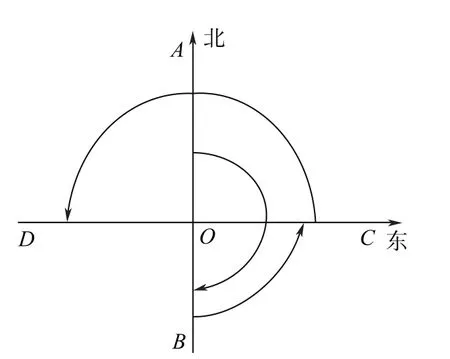
图1 四位置转位方式示意图Fig.1Four position transfer mode diagram
由图1可知,载车通过A、B两位置转位,消除了加计常值零偏对水平姿态对准的影响和陀螺常值零偏对方位对准的影响,得到了载车在B位置的姿态[5],假设B位置俯仰角为αB0,横滚角为βB0,方位角为γB0。当载车车头指向正南(B位置)时,等效东向陀螺零偏DE等于x陀螺零偏εx的负值,等效东向加计零偏BE等于x加计零偏Bx的负值,如式(6)、式(7)所示。

载车在B位置初始对准,假设在B位置单位置对准后俯仰角为αB,横滚角为βB,方位角为γB。B位置的姿态对准误差如式(8)、式(9)和式(10)所示。
B位置俯仰角对准误差:

B位置横滚角对准误差:

B位置方位角对准误差:

载车通过C、D两位置转位,消除了加计常值零偏对水平姿态对准的影响和陀螺常值零偏对方位对准的影响,得到了载车在C位置的姿态。假设C位置俯仰角为αC0,横滚角为βC0,方位角为γC0。当载车车头指向正东时,等效东向陀螺零偏DE等于y陀螺零偏εy,等效东向加计零偏BE等于y加计零偏By,如式(11)、式(12)所示。

载车在C位置初始对准,假设在C位置单位置对准后俯仰角为αC,横滚角为βC,方位角为γC。C位置的姿态对准误差如式(13)、式(14)和式(15)所示。
C位置俯仰角对准误差:

C位置横滚角对准误差:

C位置方位角对准误差:

由式(3)、式(7)和式(8)可计算得到x加计常值零偏;在x加计常值零偏标定的基础上,由式(5)、式(6)和式(10)可计算得到x陀螺常值零偏。由式(3)、式(12)和式(13)可计算得到y加计常值零偏;在y加计常值零偏标定的基础上,由式(5)、式(11)和式(15)可计算得到y陀螺常值零偏。
在水平陀螺常值零偏标定的基础上,让载车静止1h,利用陀螺敏感的地球自转角速度信息估计天向陀螺常值零偏,如式(16)所示。

式(16)中,ωie为理想的地球自转角速度,ωx、ωy、ωz分别是三只陀螺敏感的地球自转角速度分量。εx、εy、εz分别为三只陀螺的常值零偏。
1.3滤波器设计
在激光捷联惯组初始对准过程中,为了在载车四位置转位条件下将陀螺常值零偏和水平加计常值零偏估计出来,将水平加速度计常值漂移和三只陀螺常值漂移扩充为状态变量。此时激光捷联惯组的状态方程可以写成如下形式:
其中,δα、δβ、δγ表示姿态误差角;δvE、δvN分别为东向、北向速度误差;εx、εy、εz分别为IMU三个方向的陀螺常值漂移;Δx、Δy为IMU水平方向的加速度计常值漂移。为白噪声矩阵在导航坐标系下的表示,(1∶2)T为第一、第二个元素,0m×n为m×n维零矩阵。
以速度误差作为观测量,设激光捷联惯组的量测信息为:

式(20)中,vIE、vIN是激光捷联惯组解算速度,vRE、vRN是载体真实的速度,δvE、δvN是速度误差。
则观测方程为:
2 算法仿真验证
对水平加速度计常值零偏和水平陀螺常值零偏进行估计的载车四位置转位方式如图1所示。载车初始方位大致指向北(A位置),在A位置静止10min,载车转位180°到B位置,载车在B位置静止10min后回转90°,使得车头指向东(C位置),载车在C位置静止10min后,在C位置的基础上旋转180°到D位置,在D位置静止10min。
仿真过程中,模拟载车按照图1进行四位置转位,每个位置静止10min。设置三只陀螺常值零偏分别为[-0.01;0.01;0.01](°)/h;三只陀螺零偏的随机游走为[0.001;0.001;0.001](°)/;三只加计常值零偏分别为[20;20;20]μg;三只加计的随机游走为[20;20;20]μg/;水平陀螺常值零偏估计结果如图2所示,水平加计常值零偏估计结果如图3所示。
图2所示为载车四位置转位免拆卸标定仿真水平陀螺常值零偏εx、εy的卡尔曼滤波收敛曲线,水平陀螺常值零偏的估值为εx≈-0.0106(°)/h,εy≈0.0117(°)/h,滤波曲线几乎完全收敛。水平陀螺常值零偏能够估计设定值的85%左右。

图2 水平陀螺常值零偏估计结果Fig.2Estimation results of horizontal gyro constant zero bias
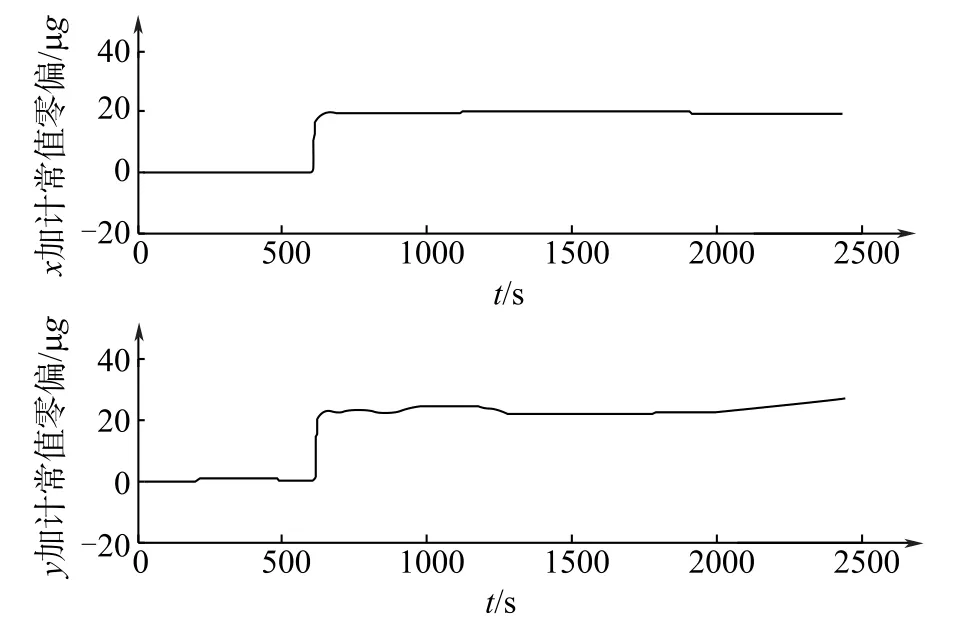
图3水平加速度计常值零偏估计结果Fig.3Estimation results of horizontal accelerometer constant zero bias
图3所示为载车四位置转位免拆卸标定仿真水平加计常值零偏Δx、Δy的卡尔曼滤波收敛曲线,水平加计常值零偏的估值为Δx≈19.991μg Δy≈24.335μg,滤波曲线几乎完全收敛。由图3可知水平加计零偏在四位置转位条件下可以较好地估计出来,水平加计常值零偏能够估计设定值的75%左右,估计误差是由于加速度计的随机误差造成的。
静止条件下利用地球自转角速度信息估计天向陀螺零偏。天向陀螺常值零偏估计结果为0.008(°)/h,能够估计设定值的80%,说明该方法是有效的。
3 试验验证
在载车上完成陀螺常值零偏和加计常值零偏的标定。安装在载车上的惯组出厂时全方位对准精度为0.04°(1σ),指标要求精度为0.06°(1σ),出厂时惯组测试精度能够满足指标要求。一年半未重新标定,测试全方位对准精度为0.132°(1σ),不能满足指标要求。对该惯组进行了三只陀螺常值零偏和水平加计常值零偏估计。载车按照图1进行四位置转位,每个位置静止10min。三只陀螺常值零偏的估计结果为[0.00654;0.0317;0.0058](°)/h。水平加计常值零偏的估计结果为[-0.0034;-0.0030]m/s2。常值零偏的补偿方法是在原有陀螺和加计常值零偏的基础上加上免拆卸标定的陀螺和加计常值零偏。
3.1水平陀螺常值零偏标定效果
通过测试水平全方位对准精度来评估水平陀螺常值零偏免拆卸标定效果。表1为水平陀螺常值零偏标定前惯组水平全方位对准结果,表2为水平陀螺常值零偏标定后惯组水平全方位对准结果。
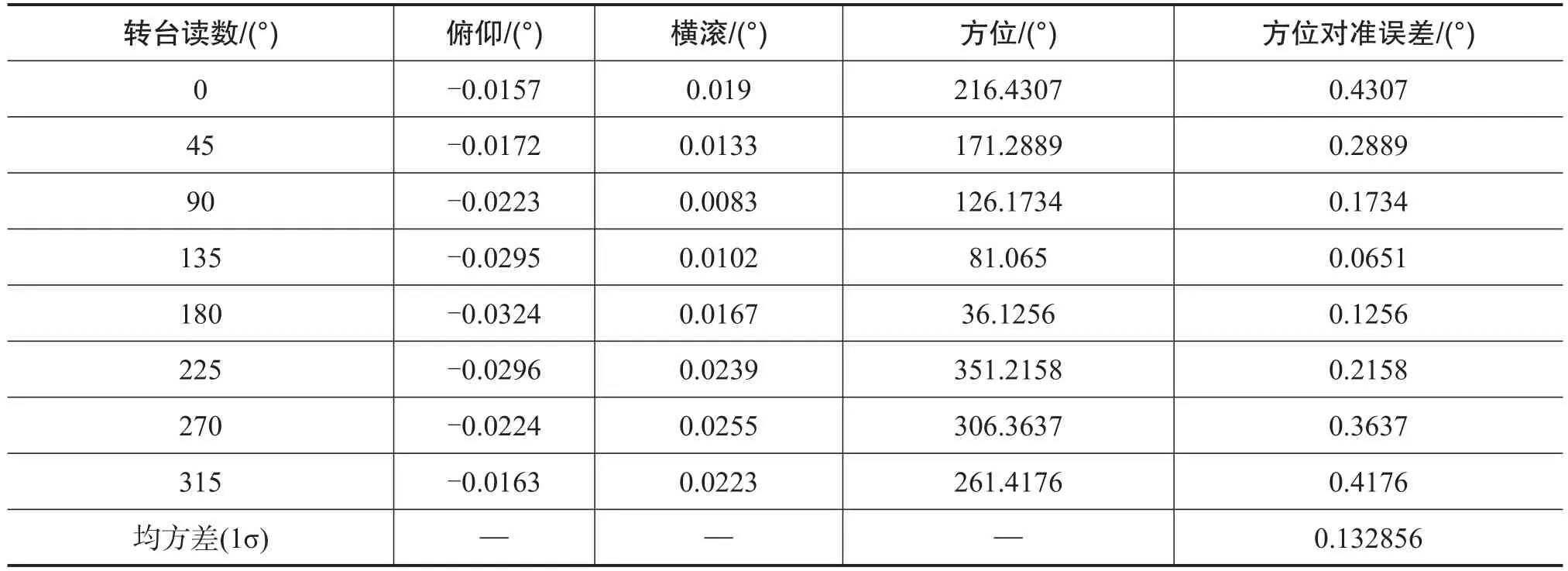
表1 水平陀螺常值零偏标定前惯组水平全方位对准结果Table 1The accuracy of all-round alignment before the calibration of horizontal gyro constant zero bias
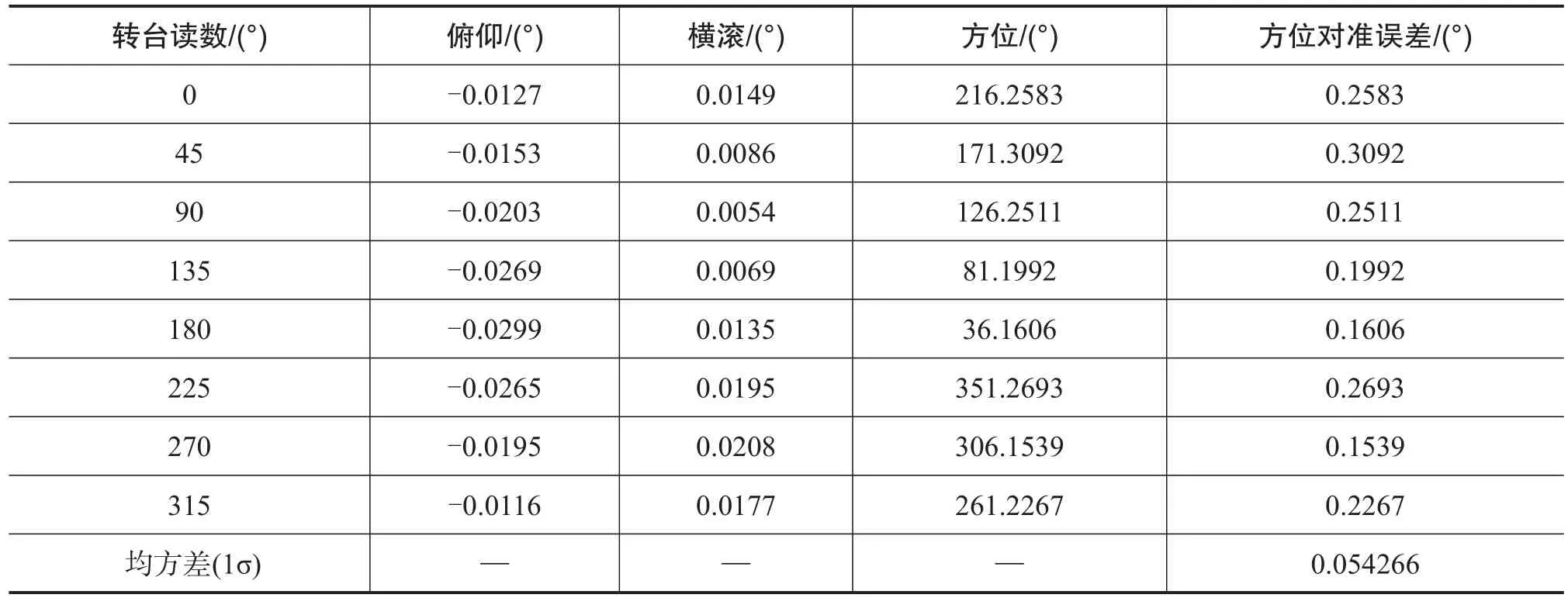
表2 水平陀螺常值零偏标定后惯组水平全方位对准结果Table 2The accuracy of all-round alignment after the calibration of horizontal gyro constant zero bias
惯组在出厂标定一年半后,水平全方位对准精度为0.132°(1σ),不能满足0.06°(1σ)的精度要求。水平陀螺常值零偏在载车四位置转位免拆卸标定补偿后,水平全方位对准精度为0.0543°(1σ)。水平陀螺常值零偏标定后全方位对准精度能够满足0.06°(1σ)的精度要求。
3.2天向陀螺常值零偏标定效果
水平陀螺常值零偏标定后,载车静止1h,利用地球自转角速度信息估计天向陀螺常值零偏。通过比较天向陀螺零偏补偿前后1h静态航漂,验证天向陀螺零偏的估计效果。天向陀螺零偏补偿前后1h静态航漂结果如图4和图5所示。
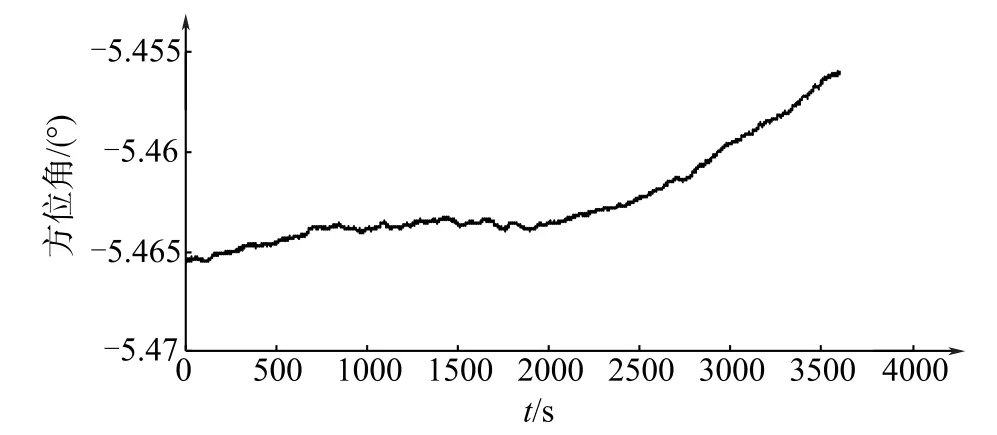
图4 天向陀螺常值零偏补偿前1h静态航漂Fig.4One hour the drift of heading angle before compensation of vertical gyro constant zero bias

图5天向陀螺常值零偏补偿后1h静态航漂Fig.5One hour the drift of heading angle after compensation of vertical gyro constant zero bias
图4为天向陀螺常值零偏标定补偿前的1h静态航漂,1h航向漂了0.01°。图5为天向陀螺常值零偏标定补偿后的1h静态航漂,1h航向漂移了0.005°。由此可知,天向陀螺常值零偏标定是有效的。
3.3水平加计常值零偏标定效果
在三只陀螺常值零偏标定补偿的基础上,通过比较水平加计常值零偏标定补偿前后载车静态条件下水平方向的速度误差和位置误差来验证水平加计常值零偏的标定补偿效果。
水平加计常值零偏标定前的速度误差与位置误差如图6所示,水平加计常值零偏标定后速度误差与位置误差如图7所示。
通过图6和图7比较可知,水平加计常值零偏标定补偿前东向速度误差最大为-1m/s,北向速度误差最大为1m/s,位置误差为2800m左右。水平加计常值零偏标定补偿后东向最大速度误差为0.5m/s,北向最大速度误差为-0.7m/s,位置误差为1500m左右。由此可知,水平加计零偏标定后明显改善了激光捷联惯组的速度精度和位置精度。

图6 水平加计常值零偏补偿前静态条件下1h速度与位置误差Fig.6One hour the error of velocity and postion before compensation of horizontal accelerometer constant zero bias
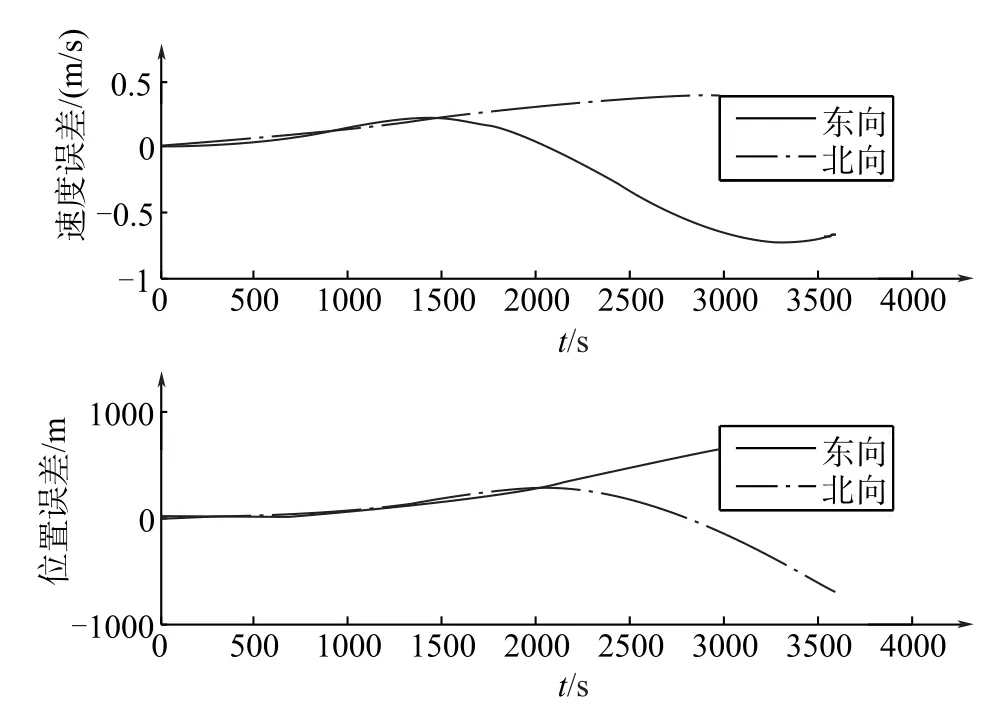
图7 水平加计常值零偏补偿后静态条件下1h速度与位置误差Fig.7One hour the error of velocity and postion after compensation of horizontal accelerometer constant zero bias
4 结论
对载车四位置转位免拆卸标定方法进行了理论分析,通过算法仿真对三只陀螺和水平加速度计常值零偏进行了估计。通过载车试验验证了载车四位置转位估计陀螺和加计常值零偏的有效性,为车载试验方案的设计提供了重要的依据,降低了设备的外场标定成本,方便部队的使用和快速反应。
[1]曹京宇.某型导弹发射车的激光陀螺惯导系统外场标定技术研究[D].国防科学技术大学,2011. CAO Jing-yu.Study on the outfield calibration technique for laser gyro inertial navigation system of missile launching vehicle[D].National University of Defense Technology,2011.
[2]杨晓霞,黄一.外场标定条件下捷联惯导系统误差状态可观测性分析[J].中国惯性技术学报,2008(6):657-664. YANG Xiao-xia,HUANG Yi.Observability analysis for error states of SINSunder outer field conditions[J].Journal of Chinese InertialTechnology,2008(6):657-664.
[3]张红良.陆用高精度激光陀螺捷联惯导系统误差参数估计方法研究[D].国防科学技术大学,2010. ZHANG Hong-liang.Research on error parameter estimation of land high-precision ring laser gyroscope strapdown inertial navigation system[D].National University of Defense Technology,2010.
[4]严恭敏,秦永元.车载激光捷联惯导系统双位置对准研究[J].弹箭与制导学报,2005(S8):478-481. YAN Gong-min,QIN Yong-yuan.The study of two position initial alignment in RLG strapdown inertial navigation system for vehicle-borne[J].Journal of Projectiles,Rockets,Missiles and Guidance,2005(S8)478-481.
[5]张天光,王秀萍,王丽霞.捷联惯性导航技术[M].北京:国防工业出版社,2010. ZHANG Tian-guang,WANG Xiu-ping,WANG Li-xia. Strapdown inertial navigation technology[M].Beijing:National Defense Industry Press,2010.
AFree Disassembly Calibration Method for Strapdown Inertial Navigation System Based on the Vehicle
ZHAO Xiao-wei,SUN Qian,LI Hong,CHEN Ling-gang,DENG Zhi-bao
(Beijing Institute of Space Launch Technology,Beijing,100076)
The SINS fixed on the vehicle is not calibrated after being used for a long time,the constant bias of gyro and accelerometer will deviate from the values calibrated in the laboratories,leading to the accuracy of all-round alignment and the accuracy of navigation don't meet the need of user.According to the traditional calibration methods of SINS,the SINS need to remove from vehicle and fix the SINS on high-precision three-axis turntable,the whole process consume time,cost highly,and is not conducive to the daily training and the rapid reaction.A free disassembly calibration method is designed.Under the condition of the vehicle,four position inversions and ten minutes standstill in each position the global observability of error parameter is analyzed,and the observability of the constant bias is proved.Making use of the Kalman filter estimates the constant bias of gyro and accelerometer.The accuracy of all-round alignment and the accuracy of navigation before and after the calibration are compared;the result indicates that the free disassembly calibration method that estimates the constant bias of gyro and accelerometer based on the vehicle four position inversions is effective.
strapdown inertial navigation system;four position inversion;free disassembly calibration;bias estimate
U666.1
A
1674-5558(2016)01-01054
10.3969/j.issn.1674-5558.2016.01.004
赵晓伟,男,助理工程师,研究方向为惯性导航、组合导航技术。
2014-12-19
