田间路径自适应智能小车设计
2016-10-13冯荣华谢艺鑫叶大鹏
冯荣华,谢艺鑫,叶大鹏
(福建农林大学机电工程学院,福州350002)
田间路径自适应智能小车设计
冯荣华,谢艺鑫,叶大鹏
(福建农林大学机电工程学院,福州350002)
为实现田间智能化管理的要求,设计了一种路径自适应智能小车。利用传感器模块检测路面情况,以单片机输出PWM信号结合全桥驱动芯片控制小车左、右轮的运动速度,使小车能在多变路径下自动行驶和避障。实验小车进入场地遍历所有路径后驶出场地。结果表明系统运行稳定、可靠性高。
田间;智能化管理;自适应;智能小车
智能小车是一种集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统,涉及传感器技术、微处理器控制、信号处理、电机驱动、驱动电源的设计等诸多方面的内容[1]。智能小车的制作与实现已引起了学者们的广泛关注。董涛等以STC89C52单片机为控制核心,结合红外遥控器和多种传感器制作了具有自动避障与寻径等功能的智能小车[2];强彦等针对当前红外避障功能的不足,设计了一种基于双路交叉红外探测的智能小车[3];李波等利用PIC单片机制作了一种基于磁传感器阵列的自主循迹系统小车[4]。然而,在目前设计的循迹智能小车当中,行驶路径都是预先安排好且固定不变的,能够自适应多变路径的智能小车较为少见。本系统以单片机为控制核心,采用超声波传感器和红外传感器模块,结合电源电路、循迹电路和避障电路,设计一种可自适应田间路径环境的智能小车系统。
1 总体设计
1.1小车行驶方案
智能小车要行驶的路径是一个模拟田间环境的场地,场地由围墙和垄构成。在场地中有且仅有一个障碍物,在垄端的左、右两侧通道中随机放置。智能小车行走的基本要求是从左下方的入口进入场地,避开障碍物,遍历场地中所有的路径后,从入口驶出场地。随着障碍物放置位置的变化,每次所走的路线都会发生变化,智能小车需能够自适应这种多变路径下的行驶要求。
1.2系统的结构
智能小车的设计思想主要是模块化,包括电源模块、单片机最小系统模块、电机驱动模块、LED灯模块、超声波传感器模块和红外传感器模块等。系统整体结构如图1所示。

图1 小车系统结构图
1.3循迹和避障路径分析
小车行驶过程中所能够遇到的障碍物情况和行驶的策略如图2所示。图2中,a、b是小车走到最后一垄时遇到墙体的情形,在a情况下右转,在b情况下左转。c、d是小车在上行过程中遇到垄端障碍物的情形,在c情况下右转,在d情况下左转。e、f是小车往回走的下行过程,在e情况下,不管前方是否有障碍物都左转,在f情况下,不管前方是否有障碍物都右转。g、h是小车在最后一垄行驶遇到障碍物时掉头行驶的情形。i、j是小车在垄间行驶,出垄时遇到障碍物掉头行驶的情形。

图2 小车行走策略图
2 硬件电路
2.1单片机最小系统模块
考虑到要控制小车电机的转速需要2路PWM脉冲调制信号,避障过程需要3个超声波传感器和2个红外传感器轮询检测,故需使用有较高的数据处理能力和较大的存储空间的单片机。我们选用了STC12C5A60S2单片机,因其运行速度快,内部集成了2路PWM,可用于控制电机驱动较大负载的场合,且抗干扰能力强、操作方便,适用于嵌入式控制系统的高灵活、有效的设计方案[5]。
2.2稳压电路模块
本系统采用镍镉充电电池供电。除减速直流电机需使用12 V电源外,单片机和其他模块的工作电压都是5 V,因此需要使用直流稳压电路将12 V电压降为5 V。这里,我们使用抗干扰能力强、输出精度高(误差为±5%)的LM7805稳压芯片实现。
2.3电机驱动模块
本设计采用L298N模块驱动小车直流电机,结合单片机输出的PWM信号来控制电机的转速,实现小车左转、右转、后退和调速等功能。L298N是一种双H桥的电机驱动模块,它的驱动能力较强,输出通道的电流可以达到2 A,解决了驱动负载能力不足的问题[6–7]。由于使用的是线圈式电机,电机在从运行状态转到停止状态或者从顺时针状态转逆时针状态时会形成很大的反向电流,故需加入二极管进行泄流,以保护芯片的安全。电机驱动模块的原理图如图3所示。

图3 电机驱动原理图
2.4传感器模块
传感器模块采用HC-SR04超声波传感器和E18-D80NK红外传感器来感知小车所处环境,帮助系统决策行走策略。单片机根据HC-SR04传感器发射和接收超声波的时间差计算出发射点到障碍物的实际距离[8–9],用以确定避障操作。小车传感器分布图如图4所示。

图4 传感器分布图
3 智能小车系统的软件设计
3.1系统流程及主程序
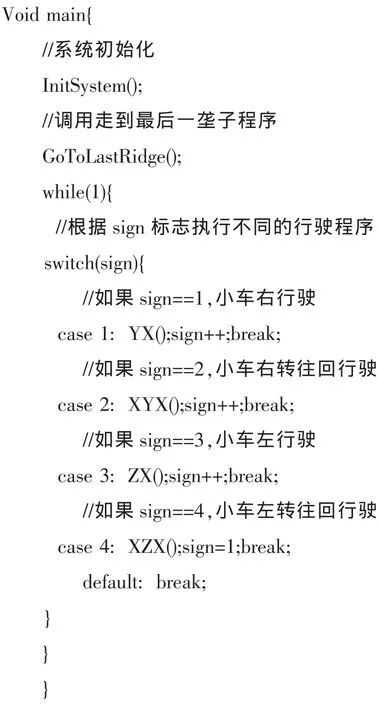
主程序的流程图如图5所示。程序用C语言进行编写。下面给出了部分主程序代码。

图5 主程序流程图
3.2走到最后一垄流程
为了简化行驶路径,小车启动进行初始化后即调用走到最后一垄程序,其流程图如图6所示。走到最后一垄程序的主要目的是为小车行驶出垄时提供方向依据,如图7所示。如果小车已经走过了最后一垄,则在a情况下左转,b情况下右转;如果没有走过最后一垄,则在a情况下右转,b情况下左转。以此保证小车行走不会迷失方向。

图6 走到最后一垄流程

图7 小车在垄间行驶出垄的情况
4 试验测试结果及分析
小车进出一次场地为一次实验。我们变换障碍物的放置位置,每变换一次位置都进行20次试验。小车所要行驶的路径如图8所示。实验场景如图9所示。

图8 行驶路径图

图9 实验场景
如果小车速度过快就易在转角处发生碰撞,因此,在行驶过程中需慢慢调节小车的速度,以保持小车行驶状态的稳定。实验结果如表1所示。从表1可知,无论障碍物放置在哪个位置,小车都能够实现避开障碍行驶的目的。
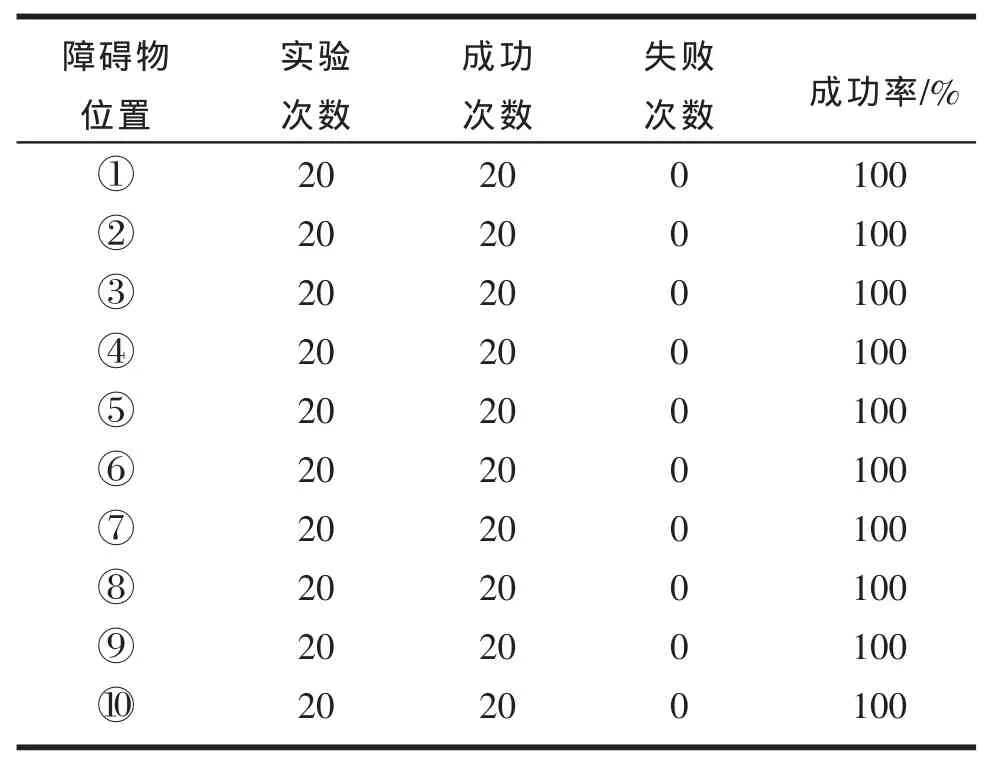
表1 实验结果
5 结束语
本文以单片机为控制单元,采用稳压电源模块、超声波传感器模块、红外传感器模块和电机驱动模块构建了自适应农田路径的智能小车控制系统。在实验场地中,随着障碍物放置位置的不同,小车遍历所有垄所走的路线也有所不同。系统以模块化的方式进行设计,结构简单、性能稳定,实现了设计要求。如需提高小车的智能化和实用性,可增加自动识别农作物、农药喷洒和变量施肥等功能。
[1]BISHOP R.Intelligent Vehicle Applications Worldwide[J]. IEEE Intelligent Systems and Their Applications,2000,15(1):78-81.
[2]董涛,刘进英,蒋苏.基于单片机的智能小车的设计与制作[J].计算机测量与控制,2009(2):380-382.
[3]强彦,叶文鹏,屈明月,等.基于红外避障的智能小车的设计[J].微电子学与计算机,2013(2):140-143.
[4]李波,杨卫,张文栋,等.一种智能小车自主寻/循迹系统设计[J].计算机测量与控制,2012(10):2798-2801.
[5]余炽业,宋跃,雷瑞庭.基于STC12C5A60S2的智能循迹小车[J].实验室研究与探索,2014(11):46-49.
[6]左敏,曾广平,涂序彦.无人变电站智能机器人的视觉导航研究[J].电子学报,2011(10):2464-2468.
[7]胡洁,尤军,郭辉,等.基于单片机的遥控棚室作业机模型设计[J].农机化研究,2014(6):86-89.
[8]高云.农业机器人的超声波测距系统设计[J].农机化研究,2009(4):76-79.
[9]沈燕,高晓蓉,孙增友,等.基于单片机的超声波测距仪设计[J].现代电子技术,2012(7):126-129.
【责任编辑梅欣丽】
Design of Self-adaptive Intelligent Vehicle for Field Path
FENG Ronghua,XIE Yixin,YE Dapeng
(College of Mechanical and Electrical Engineering,Fujian Agriculture and Forestry University,Fuzhou 350002,China)
In this paper,for realizing field intellectualization,an intelligent field path self-adaptive vehicle,which could identify various paths and avoid obstacles,was designed.The vehicle first detected pavement condition through the sensor module,then combined the output PWM signal and full-bridge driver chip to control its velocity of left and right wheels.Thus it could automatically avoid obstacles in various paths to accomplish self-adaptation.The result showed that the whole system could reach the expected goal with steady running and high reliability.
field;intelligent management;self-adaption;intelligent vehicle
TP24
A
2095-7726(2016)09-0049-04
2016-05-11
福建省自然科学基金项目(2016J05110);福建省高水平大学建设重点项目(612014017)
冯荣华(1991-),男,福建漳州人,硕士研究生,研究方向:农业机器人应用技术。
叶大鹏(1971-),男,福建霞浦人,教授,博士,研究方向:环境监测与控制。
