基于虚拟输出阻抗分析的并联三相四桥臂逆变器环流抑制
2016-10-11陈轶涵龚春英
陈轶涵 沈 茜 任 磊 龚春英
(南京航空航天大学自动化学院 南京 210016)
基于虚拟输出阻抗分析的并联三相四桥臂逆变器环流抑制
陈轶涵 沈 茜 任 磊 龚春英
(南京航空航天大学自动化学院 南京 210016)
三相四桥臂(3P4L)逆变器在三相三桥臂逆变器的基础上引入第四桥臂,使得三相能够解耦控制并具备带不对称负载能力。多个逆变单元共输入、输出方式并联,能够实现功率扩容,但同时也带来并联单元之间的环流问题。而 3P4L由于其独特的拓扑结构,其并联控制策略较单相或三相三桥臂逆变器并联更为复杂。在基于双闭环平均电流均流控制的并联 3P4L逆变器控制策略基础上,建立并联系统的小信号模型,并由此获得并联桥臂的虚拟输出阻抗模型。分析控制环路以及主电路参数与虚拟输出阻抗的关系,根据分析结果指导环路与主功率器件的参数设计,达到抑制并联桥臂环流、提高并联单元均流性能的目的,最后提出基于虚拟输出阻抗分析法的并联环流抑制方法,通过仿真和实验验证了该方法的正确性。
并联三相四桥臂逆变器 平均电流控制 环流 3次谐波注入
0 引言
目前,三相400Hz中频逆变器广泛应用于对变流器体积重量要求较高的舰船、航空和航天等领域。广泛采用的中频三相逆变器拓扑主要有三相半桥逆变器、组合式三相逆变器、三相全桥逆变器以及三相四线制逆变器。而三相四桥臂(three-Phase four-Leg, 3P4L)逆变器作为三相四线制逆变器的一类延伸,其拓扑结构简单,在实现三相负载不对称工作功能的同时,相比组合式三相逆变器功率器件的数量大大减少。因为第四桥臂的引入,其控制策略更为复杂。如文献[1,2]基于 3P4L逆变器的大信号模型,采用三相解耦的控制策略,证明第四桥臂能够独立于前三桥臂控制。为了提高直流电压利用率,文献[3]通过对四个桥臂调制信号注入3次谐波,使直流电压利用率提高了14%,3P4L逆变器能够以更低的输入电压工作,从而提高了变换器的效率。
随着多电与全电舰船和飞机概念的提出,舰船与航空机载设备的三相中频变换器功率容量越来越高。受当前高频开关器件功率等级的限制,多台逆变器单元共直流母线并联成为广泛采用的扩容方式。该方式具备以下几个优点:①扩容方式简便,不需要重新设计拓扑;②多台设备的并联能够实现冗余备份功能;③控制策略简单易实现。
但是共直流母线并联方式使得并联桥臂构成回路,带来环流问题,严重时将损坏变换器。针对该问题,文献[4-6]采用基于空间矢量控制的均流控制方法,该方法采用复杂的矩阵变换,以获得旋转坐标系或静止坐标系下的均流基准信号、同步并联单元的调制信号,达到抑制环流的目的。而文献[7]采用基于下垂特性的无线并联的方案既实现了并联单元的冗余工作,同时省却了单元之间的互联线,但是其动态性能差且运算较为复杂。
上述均流控制方法都依赖于复杂的数学运算,宜采用数字控制方式实现。而在中频逆变器并联场合,由于基波频率大大高于工频逆变器,依赖于复杂运算的数字均流控制方法将影响系统每个基波周期的开关次数。因此在输出谐波质量要求较高的中频逆变器场合,通常采用适用于模拟实现的控制策略。如文献[8,9]采用基于主从控制的逆变器并联环流抑制方法,但是无法实现多台并联单元之间的冗余工作。文献[10]对单相和三相三桥臂逆变器环流问题进行了研究,采用基于功率均分法的均流控制策略,在抑制环流的同时实现了并联模块间冗余工作,但是该方法需要额外的负载电流采样,一定程度上影响了动态性能。而文献[11]也对三相三桥臂逆变器并联进行了研究,提出基于平均电流控制的双环均流控制策略,该方法能够让并联单元主电路冗余工作,且动态性能良好。
上述逆变器并联研究对象都是基于单相或三相三桥臂逆变器的并联。并联 3P4L逆变器拓扑在三相三桥臂的基础上增加了第四桥臂,使得均流控制更加复杂。本文针对该拓扑形式的中频并联逆变器,分析并联拓扑四个桥臂环流的生成机理,并据此采用一种基于桥臂电感电流瞬时值反馈的平均电流均流控制方法。
为了更好地抑制并联单元之间的环流,目前有学者提出基于输入、输出阻抗的分析方法。如文献[12,13]都是在分析多个逆变器并联系统中的输出阻抗对于系统性能以及有功、无功环流影响的基础上,得到输出阻抗与主电路特性的关系,从而通过引入感性的虚拟阻抗,提出基于下垂控制的双环控制策略。但是如前文所述,下垂控制不适用于采用模拟电路控制的并联中频逆变器。
本文在建立并联 3P4L逆变器小信号模型的基础上,获得并联单元的桥臂虚拟输出阻抗模型。在此基础上,通过对不同主电路、控制电路参数下输出阻抗幅相曲线分析,揭示并联单元控制环路与主电路主要参数与虚拟输出阻抗模型之间的关系,获得一整套优化环流抑制的输出阻抗设计依据。仿真和实验证明该设计依据使各成分的环流得到了有效抑制,并联桥臂的均流性能得到了改善。
1 并联三相四桥臂逆变器双闭环均流控制
本研究以两台中频 3P4L并联逆变器系统作为研究对象,主电路拓扑如图 1所示。Q1~Q16为主开关管;La1、Lb1、Lc1和 La2、Lb2、Lc2为三相输出滤波电感;Ln1、Ln2为第四桥臂电感,用来抑制中线电流开关纹波;Ca、Cb和Cc为三相输出滤波电容;Ra、Rb和 Rc为三相负载阻抗;Va、Vb和 Vc为三相输出电压。两台并联逆变器单元共用输入直流母线,Vdc为输入电压,iLZ为三相负载零序电流。

图1 三相四桥臂并联逆变器主电路拓扑Fig.1 Topology of paralleled 3P4L inverter
文献[14,15]采用相桥臂平均法将每个桥臂由受控电压源和电流源构成的平均电路模型代替,并由此得到逆变器的大信号模型。将该方法拓展到两单元并联三相四桥臂拓扑,可以建立该拓扑大信号模型。以两单元并联为例,设置da1、db1、dc1、dn1和da2、db2、dc2、dn2为并联各桥臂开关周期占空比信号,ip1、ip2为并联单元输入直流电流,Vdc为输入直流电压,ia1、ib1、ic1、in1和ia2、ib2、ic2、in2为各桥臂输出电感电流,ia、ib和ic为三相负载电流,G为并联第四桥臂滤波电感的公共连接点。并联桥臂大信号模型如图2所示。

图2 并联桥臂模型Fig.2 Paralleled legs model
假设并联单元主电路参数平衡,其中输出滤波电容Ca=Cb=Cc=Cf,中线电感Ln1=Ln2,输出滤波电感 La1=Lb1=Lc1=La2=Lb2=Lc2=Lf。由图 2并联系统大信号模型得到桥臂电路方程为

并联模块零序电流定义为三相电感电流之和,3P4L逆变器桥臂零序电流模型为

设 iLZ为三相负载零序电流,VZ为输出电压零序分量,则根据式(5)可推导得到并联系统的零序电流模型

由式(6)可见,并联系统第四桥臂零序电流由负载零序电流和输出电压零序成分导致的零序电流组成。并联逆变器四个并联桥臂的调制信号相互独立,若不采取均流措施,将造成四个桥臂功率管出现环流,同时环流的累积可能损坏逆变器。文献[4]通过对并联三相逆变器大信号分析,将并联三相三桥臂逆变器环流分解为正序、负序和零序成分。
根据定义环流为两并联桥臂电感电流之差的1/2,以第四桥臂为例,假设第四桥臂环流为Δin,基于式(1)~式(4)的并联桥臂大信号模型,增大滤波电感能够减小电感电流变化率,从而起到减小环流变化率 dΔin/dt的目的。但是因为环流存在累积,若控制策略中电感电流为不控量,经过若干个开关周期的累积,依然可能出现环流过大而损坏主电路。为了抑制3P4L逆变器A、B、C桥臂并联环流,基于电压、电流双闭环均流控制策略,三相并联桥臂采用如图3所示的控制策略。该控制策略共用一个电压环,每相电流环共用一个电流基准信号,iLa1、iLb1、iLc1和iLa2、iLb2、iLc2分别为并联模块三相电感电流反馈值。Sa1、Sb1、Sc1和 Sa2、Sb2、Sc2为并联单元各电流环输出信号。图3中S1、S2分别为并联单元各自注入的3次谐波信号,该信号生成方式将在下文中叙述。A、B、C三相并联桥臂采用的基于平均电流控制的均流策略具备以下三个特点:
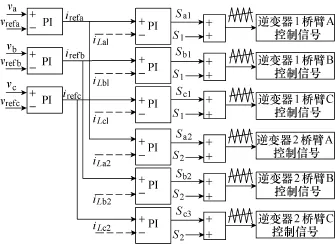
图3 并联三相四桥臂逆变器A、B、C桥臂控制框图Fig.3 Control block diagram for A、B、C legs of paralleled 3P4L inverter
(1)各并联单元主电路能够实现冗余工作,一台或几台并联单元停机,不影响其他单元正常工作。
(2)控制简便,易通过模拟电路实现,更适用于中频逆变器并联场合。
(3)电流环的加入能够起到短路限流保护的作用,不需要额外的限流环。
相对于3P4L逆变器A、B、C三个桥臂的滤波电感,并联第四桥臂滤波电感通常更小,因此在这段工作区域内,电感电流的上升斜率更快。为了抑制第四桥臂并联环流,设iLn1、iLn2为第四桥臂电感电流反馈值。通过均流控制策略实现第四桥臂均流时达到的控制目标

结合式(5)和式(6),推导得到

为了实现如式(8)所示控制目标,要求第四桥臂电感电流反馈信号跟踪本模块三相电流零序分量,从而实现并联模块第四桥臂均流和独立控制。基于如图4所示A、B、C桥臂平均电流的均流控制策略,定义前三个并联桥臂公共电压环输出信号为irefa、irefb和irefc,分别作为三相电感电流参考信号,定义irefn为第四桥臂电流基准,iref0为并联单元三相零序电流基准,根据式(6),第四桥臂电感电流基准与A、B、C桥臂电感电流基准关系需满足

式中,irefn作为第四桥臂零序电流分量的基准信号,与反馈第四桥臂电感电流比较,经过第四桥臂电流环补偿网络实现调制,该输出信号能够实时跟踪第四桥臂电感电流的变化,实现并联模块第四桥臂电感电流均流,第四桥臂控制框图如图4中点划线框部分所示。

图4 第四桥臂均流控制框图Fig4 Control method of paralleled 4th leg
为了提高逆变器的直流电压利用率,可以采用对四个桥臂调制信号叠加3次谐波的方式[15,16]。该控制策略不仅实现了对A、B、C三相的独立控制,使其输出对称的三相电压,而且能够降低对电源电压等级的要求,提高电源电压的利用率约 14%[1]。但是3次谐波生成的计算较为复杂,往往依赖数字信号处理的计算,不适用于模拟控制的中频逆变器。
为了生成能够跟踪三相调制波相位与幅值的 3次谐波,需要获得调制波的幅值和相位信号。理想工作条件下,采用平均电流控制的A、B、C桥臂电流环输出信号主要成分是与基波频率一致的正弦波。将三相电流环输出正弦波信号如图 5a方式合成,得到的信号的主要成分是3次谐波,且该3次谐波信号能够跟踪调制信号的幅值和相位。

图5 基于3次谐波注入的并联三相四桥臂逆变器控制框图Fig.5 Control method of parallel three 3P4L inverter based on 3rd harmonic injection
假设Sa、Sb和Sc为三相电流环输出调制信号,该3次谐波生成方式的表达式为

将图5a的3次谐波合成方案应用于并联3P4L逆变器,并联系统控制策略框图如图5b所示。
2 并联单元的建模与稳定性分析
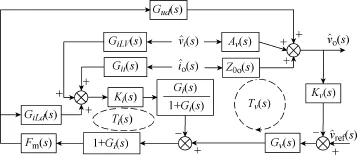
第1节所采用的双闭环控制策略,各并联桥臂都采用基于电感电流平均值反馈的平均电流控制。而采用LC输出滤波方式的3P4L逆变器属于Buck族变换器。同时其增加了第四桥臂为零序电流提供通路,因此可以将三相控制解耦,并分解为三个Buck型变换器进行建模分析。假设各并联单元控制参数与主电路参数对称一致的前提下,取一组并联桥臂建立小信号模型如图6所示。

图6 并联桥臂小信号模型Fig.6 Small signal model of paralleled legs
图6中,Gud(s)为占空比信号到输出电压传递函数,Z0o1(s)、Z0o2(s)分别为两并联桥臂的开环输出阻抗,Kv(s)为输出电压采样网络传递函数,Ki(s)为电感电流采样网络传递函数,Gv(s)为电压环补偿网络传递函数,Gi(s)为电流环补偿网络传递函数,GiLd(s)为占空比信号到电感电流传递函数,Fm为 SPWM调制传递函数。Ti(s)为电流内环传递函数,Tv(s)为电压外环传递函数,Gii(s)为输出电流小信号扰动对电感电流传递函数,GiLV(s)为输入电压小信号扰动对电感电流传递函数。GR为输出滤波电感电流对输出电压小信号扰动的传递函数,设 Resr为输出滤波电容等效寄生电阻,R为负载阻抗,C为输出滤波电容。
文献[17]通过对并联 Buck型变换器的建模分析,证明假设控制电路参数线性恒定,采用基于平均电流控制的双环控制策略并联 Buck型变换器的环路相互之间是解耦的,因此对并联系统的建模可以基于单台变换器进行小信号建模并进行扩展。分解方式采用每相提取输出电压、电感电流两种反馈信号的方式实现双环控制。以A相并联单元一为例,得到其小信号模型和控制框图如图7所示。
设 Udc为输入电压,Lf为滤波电感,占空比控制信号与电感电流小信号传递函数GiLd(s)为

电流内环传递函数为


图8 电流环闭环传递函数伯德图Fig.8 Bode plots of current closed loop
为了使电流环补偿网络反映电感电流基波分量的变化,需要滤除所反馈的电感电流信号中的高频分量。通过补偿网络调节使反馈值跟踪基准信号,以更好地实现均流。因此补偿网络的设计在低频段需要较大的增益,而在中频段,补偿网络相频特性应当有一个最大为 90°的超前相位,以确保系统的稳定和动态性能。电流环采用单极点单零点补偿网络,获得电流内环传递函数的伯德图如图8所示。电流环截止频率为 9.8kHz,约为开关调制频率的1/3,相位裕度为80°,400Hz基波频率处增益为35dB。
图7中,输出滤波电感电流对输出电压的传递函数为

得到占空比对输出电压的传递函数为

电压外环传递函数为

为了简化开环与闭环阻抗表达式,设环路增益与电压环闭环增益传递函数分别为T1(s)与T2(s),则

电压环也采用单极点单零点补偿网络,使输出电压能够很好地跟踪基准电压,得到T2(s)伯德图如图 9所示。电压环截止频率为 9kHz,相位裕度为55°,400Hz处增益为24dB,根据闭环系统稳定性判据可以认为系统具有较好的稳态和动态性能。

图9 电压环闭环传递函数伯德图Fig.9 Bode plots of voltage closed loop
3 虚拟输出阻抗分析与桥臂环流抑制
3.1输出阻抗模型
对于共输入直流母线并联逆变器系统,提高并联单元输出阻抗有利于降低逆变器环流[12,13]。为了研究该扰动信号对环流的作用,消除其对并联系统的影响,在上一节获得的并联单元的小信号模型的基础上,建立虚拟输出阻抗与环路参数的关系。
当外环开环,仅电流内环闭环时,设

其中

式中,Z0o(s)为开环输出阻抗,电感电流闭环后,滤波电感可视为电流源,此时变换器输出阻抗近似等效于输出滤波电容及负载电阻并联,呈现一阶系统特性,其表达式为[18]

式中,RE为滤波电感等效串联电阻;Q为品质因数为输出滤波电容转折频率输出电感转折频率为LC滤波谐振频率
电感电流闭环后,滤波电感可视为电流源,因而仅电流闭环时变换器输出阻抗近似于输出滤波电容及负载电阻并联,呈现一阶系统特性,LC滤波网络谐振特性得到根本解决,因此闭环输出阻抗为

此时闭环输出阻抗可近似表示为

3.2基于虚拟输出阻抗的并联环流的抑制
输出阻抗与逆变器桥臂输出为串联关系,设Z1、Z2分别为并联单元同一相桥臂闭环输出阻抗,Z3、Z4分别为并联单元第四桥臂闭环输出阻抗,R为负载阻抗,A、B、C三相任意桥臂与第四桥臂组成的阻抗模型如图10所示。通过额外修改控制参数与主电路参数以增大输出阻抗达到抑制环流的目的,等效加入 Zs1、Zs2虚拟输出阻抗。且能够设置其对特定频率的谐波起到抑制作用,同时不会影响输出电压负载调整率等性能指标。
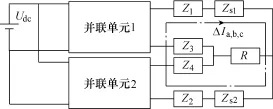
图10 并联桥臂输出阻抗模型Fig.10 Output impedance model of paralleled legs
为了分析主电路和控制环路参数对虚拟输出阻抗增益的影响,并通过间接控制输出阻抗增益达到优化并联单元均流性能的目的,根据式(22),使用Matlab软件绘制不同环路参数对应的输出阻抗增益的幅频特性曲线。
Matlab模型参数与第4节Saber仿真及实验平台参数一致。输入电压290V,输出电压三相115V/ 400Hz,相位互差120°,开关频率28kHz,输出滤波电感 240μH,输出滤波电容 30μF,额定负载10kV·A。并联单元采用如图5所示控制策略。当并联单元电流环采用单极点单零点补偿网络情况时,输出阻抗增益对直流成分来说相当于无穷大。
如图11a所示,若不限制电流环补偿网络增益,随着频率成分的降低输出阻抗增益不断增加,此时在电流环单极点单零点补偿网络的基础上,增加限增益环节,限制输出阻抗最大增益约为20dB。
此外在很多并联方案中通过增大并联滤波电感减小环流成分,如图11b所示,将并联单元输出滤波电感由180μH逐渐增大到300μH,同样能够达到提高虚拟输出阻抗的目的,但是更大的滤波电感将造成体积、重量的增大和系统的动态响应变慢。而由图11c可知,改变电压环增益,仅轻微影响100~1 000Hz的低频段的增益,对于改变虚拟输出阻抗从而抑制环流没有明显作用。
如图11d所示,设置四组电流环增益,分别为2dB、3.5dB、6dB和 9.5dB,可以发现闭环输出阻抗随着电流环增益的提高而增加。结合图 10所示并联桥臂等效阻抗电路模型,如果要滤除特定频率成分的环流,可以采用在电流环中加入该频率成分的前馈环节来实现,如图 12所示,图中模块 P为前馈环的增益环节。


图11 不同控制环路与主电路参数下输出阻抗幅频曲线Fig.11 Nyquist diagrams for analysis of relationships between control parameters, main circuit and output impedance

图12 包含环流成分前馈的并联桥臂控制小信号模型Fig.12 Small signal model of paralleled legs under control based on feed forward loop of circulating current
总结本文对基于双闭环平均电流控制的并联3P4L逆变器的建模与虚拟输出阻抗分析,得到以下结论:
(1)采用单极点单零点作为电流内环补偿网络,并联桥臂虚拟输出阻抗幅相曲线中增益随频率降低而增大,其对于直流分量的增益将趋近无穷大,过大的并联桥臂输出阻抗增益将导致直流分量叠加到输出侧,造成输出波形正负不对称而畸变,同时控制信号也会趋近饱和,因而需要对均流内环采用限增益措施。并联桥臂滤波电感与输出阻抗成正比,从虚拟输出阻抗角度解释滤波电感增大能够更好的抑制环流,但是更大的电感将增大整机体积和重量。
(2)第四桥臂因为并联滤波电感远小于三相并联桥臂,因此其电流谐波成分包含更多的高频成分,这将在第四桥臂均流环输出信号引入大量的高频谐波,需要在第四桥臂均流环补偿网络基础上增加高频极点以滤除该谐波成分,防止第四桥臂调制信号与载波信号多次交割。
(3)提高电流环增益能够间接提高虚拟输出阻抗,有利于抑制环流,但是过高增益会影响系统本身的稳定和动态性能,需要根据系统的小信号模型,保证电流闭环与电压闭环传递函数满足稳定性判据。
(4)电压外环补偿网络参数不影响环流抑制效果。
4 仿真和实验
4.1仿真
采用Saber仿真软件对两单元并联3P4L逆变器系统进行仿真。仿真模型参数与Matlab仿真参数一致。
在电流环加入最大增益限制前,进行并联单元的仿真,结果如图13所示。根据第3节分析,由于直流分量存在于并联逆变器输出信号,导致如图13a所示的控制信号出现偏执、甚至饱和。此时以并联单元 A相为例,由于半周期出现过调制,正负半周峰值处电感电流脉动幅值不对称,此现象如图13b所示。
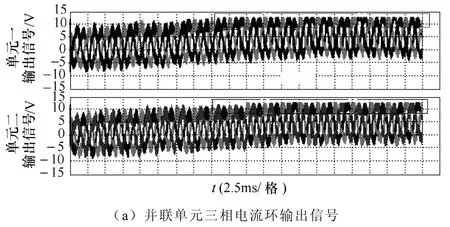

图13 未限制电流环补偿网络增益仿真结果Fig.13 Saber simulation results without limit of current loop gain

图14 平衡负载Saber仿真波形Fig.14 Saber simulation of inverter with balance load with limit of current loop gain
根据第 3节总结的主电路与控制参数设计依据,在保证系统稳定性的前提下,限制均流环补偿网络增益使输出阻抗增益最大值约为22dB,并增加第四桥臂高频极点,其仿真结果如图14所示。比较图 14a与图 13a,电流环输出信号不存在桥臂电流偏置与控制信号饱和现象,从而改善了并联桥臂电感电流波形的正负半周对称度,如图14b所示。如图 14c四个桥臂环流在本文控制策略的控制下,环流峰值得到了很好的抑制,四个桥臂环流峰值均不大于3A。
在不对称负载条件下并联 3P4L逆变器的仿真波形如图15所示,A相空载,B、C相1kV·A负载。图15a仿真结果表明本文所提出控制策略能够保证不平衡负载下A、B、C桥臂的均流,且从图15b可看出,并联单元第四桥臂均衡流过频率为400Hz零序电流,具备良好的稳态均流性能。

图15 不平衡负载Saber仿真波形Fig.15 Saber simulation of inverter with unbalance load
4.2实验
在实验室搭建一台由两单元并联组成的 10kV·A 3P4L逆变器样机,如图16所示。主电路与控制电路参数与Matlab及Saber仿真一致。
图 17为工作在 10kV·A三相平衡负载、290V输入电压状态下,未采用本文设计依据前得到的三相输出电压与 A相并联桥臂电感电流波形。如图17b所示,电感电流正负半周波峰处脉动量不对称;同时如图17a所示,输出电压受饱和调制的影响,负半周出现明显的波形畸变。

图16 10kV·A并联三相四桥臂实验平台Fig.16 10kV·A parallel 3P4L inverter

图17 电流环无增益限制时的实验波形Fig.17 Experiment waveforms without limit of current loop gain
基于本文获得的控制环路参数以及主电路设计依据,同时限制均流环补偿网络增益的实验波形如图18所示。图18a中三相输出电压正负半周消除了畸变,同时以A相并联桥臂电感电流波形为例,得到三相负载分别为3kV·A与10kV·A均流波形如图18b、图18c所示,实验结果表明本文所使用的设计方法在消除了输出电压与桥臂电流正负半周不对称基础上,不同负载下均流性能良好。同时实验结果图18d验证了本文所采用的零序电流基准跟踪方法能够实现并联第四桥臂的均流。

图18 10kV·A平衡负载稳态实验波形Fig.18 Experiment waveforms with limit of current loop gain
图19为不平衡负载情况下的实验波形,实验中A相空载,B、C相1/3载。此时第四桥臂为不平衡负载产生的零序电流提供通路。如图19a可以看出,因为输出滤波电容空载时依然需要提供交流电流,此时A相空载时依然有电流流过。实验结果表明本文控制策略在实现A、B、C桥臂电流的均流的同时,两组并联第四桥臂流过频率为400Hz的零序电流,第四桥臂在负载不平衡时同样具备良好的均流性能。
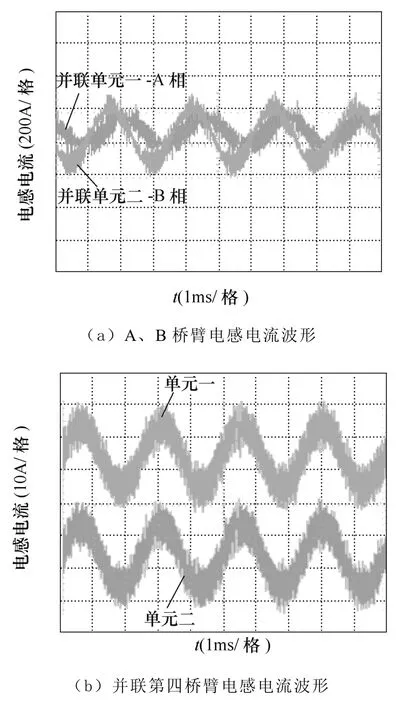
图19 不平衡负载实验波形Fig.19 Waveforms of parallel inverter with unbalance load
5 结论
本文通过对并联 3P4L逆变器桥臂环流生成机理的分析,采取基于平均电流控制的三相桥臂均流控制策略。并根据第四桥臂零序电流模型,提出一种并联第四桥臂零序电流跟踪均流控制方法。为了提高直流电压利用率,本文采用一种适用于模拟方式的方法实现了四个桥臂的3次谐波注入。
为了进一步提高并联单元的均流性能,以并联桥臂小信号模型为基础,建立其虚拟输出阻抗模型。分析控制环路参数与主电路滤波网络参数与虚拟输出阻抗模型的关系,从而获得了一套采用双闭环均流控制策略的并联 3P4L逆变器补偿网络与主电路设计方法。根据该设计方法,在实现桥臂均流的基础上,进一步解决了桥臂电流与输出电压正负半周不对称的问题,并提出一种能够针对不同谐波成分环流达到抑制效果的前馈控制方案。最后通过仿真和实验验证了本文方法的正确性和有效性。
[1] Vechiu I, Curea O, Camblong H. Transient operation of a four-leg inverter for autonomous applications with unbalanced load[J]. IEEE Transactions on Power Electronics, 2010, 25(2): 399-407.
[2] Kim J H, Sul S K. A carrier-based PWM method for three-phase four-leg voltage source converters[J]. IEEE Transactions on Power Electronics, 2004, 19(1): 66-75.
[3] 官二勇, 宋平岗, 叶满园. 基于 3次谐波注入法的三相四桥臂逆变电源[J]. 电工技术学报, 2005, 20(12): 43-52. Guan Eryong, Song Pinggang, Ye Manyuan. Threephase inverter with four bridge-legs based on three harmonic injection method[J]. Transactions of China Electrotechnical Society, 2005, 20(12): 43-52.
[4] Xu Zhuang, Li Rui, Zhu Hui, et al. Control of parallel multiple converters for direct-drive permanentmagnet wind power generation systems[J]. IEEE Transactions on Power Electronics, 2012, 27(3): 1259-1270.
[5] Pouya H R Z, Mokhtari H. Control of parallel three-phase inverters using optimal control and SVPWM technique[C]//IEEE International Symposium on Industrial Electronics, Seoul, 2009: 1823-1828.
[6] Tuladhar A, Jin H, Unger T, et al. Parallel operation of single phase inverters with no control interconnections[C]// IEEE Applied Power Electronics Conference and Exposition, 1997, 1: 94-100.
[7] Chiang S J, Chang J M. Parrallel control of the UPS inverters with frequency dependent droop scheme[C]// Power Electronics Specialists Conference, 2001, 2: 957-961.
[8] 闫耀民, 范瑜, 汪至中. 一种改进的电压电流混合控制的并联逆变器[J]. 铁道学报, 2003, 25(3): 55-58. Yan Yaomin, Fan Yu, Wang Zhizhong. Advanced voltage and current hybrid controlled parallel inverters[J]. Journal of the China Railway Society, 2003, 25(3): 55-58.
[9] 肖岚, 胡文斌, 蒋渭忠. 基于主从控制的逆变器并联系统研究[J]. 东南大学学报(自然科学版), 2002, 32(1): 133-137. Xiao Lan, Hu Wenbin, Jiang Weizhong. Research on master-slave controlled inverter parallel system[J]. Journal of Southeast University (Natural Science Edition), 2002, 32(1): 133-137.
[10] 程荣仓, 刘正之. 大容量单相逆变装置并联技术的分析[J]. 中国电机工程学报, 2004, 24(7): 112-116. Cheng Rongcang, Liu Zhengzhi. Analysis of parallel single-phase inverters of large capacity[J]. Proceedings of the CSEE, 2004, 24(7): 112-116.
[11] 方天治, 阮新波, 肖岚, 等. 一种改进的分布式逆变器并联控制策略[J]. 中国电机工程学报, 2008, 28(33): 30-36. Fang Tianzhi, Ruan Xinbo, Xiao Lan, et al. An improved distributed control strategy of parallel inverters[J]. Proceedings of the CSEE, 2008, 28(33): 30-36.
[12] Yao Wei, Chen Min, Matas J, et al. Design and analysis of the droop control method for parallel inverters considering the impact of the complex impedance on the power sharing[J]. IEEE Transactions on Industrial Electronics, 2011, 58(2): 576-588.
[13] 张庆梅, 彭楚武, 陈燕东, 等. 一种微电网多逆变器并联运行控制策略[J]. 中国电机工程学报, 2012, 32(25): 126-132. Zhang Qinghai, Peng Chuwu, Chen Yandong, et al. A control strategy for parallel operation of multiinverters in microgrid[J]. Proceedings of the CSEE, 2012, 32(25): 126-132.
[14] 孙驰, 鲁军勇, 马伟明. 一种新的三相四桥臂逆变器控制方法[J]. 电工技术学报, 2007, 22(2): 57-63, 73. Sun Chi, Lu Junyong, Ma Weiming. A novel control method for three-phase four-leg inverter[J]. Transactions of China Electrotechnical society, 2007, 22(2): 57-63, 73.
[15] 邓卫华, 张波, 丘东元, 等. 三相电压型PWM整流器状态反馈精确线性化解耦控制研究[J]. 中国电机工程学报, 2005, 25(7): 97-103. Deng Weihua, Zhang Bo, Qiu Dongyuan, et al. The research of decoupled state variable feed back linearization control method of three-phase voltage-source PWM rectifier[J]. Proceedings of the CSEE, 2005, 25(7): 97-103.
[16] He Lei, Fei Lanling, Jian Xiong, et al. Research on paralleled three-phase four-leg voltage source inverters based on dual-loop control in αβo coordinate[C]// 8th International Conference on Power Electronics and ECCE Asia, 2011: 2912-2919.
[17] Chen Wu, Ruan Xinbo, Yan Hong, et al. DC/DC conversion systems consisting of multiple converter modules: stability, control, and experimental verifications[J]. IEEE Transactions on Power Electronics, 2009, 24(6): 1463-1474.
[18] Li Peng, Lehman B. Accurate loop gain prediction for DC-DC converter due to the impact of source/input filter[J]. IEEE Transactions on Power Electronics, 2005, 20(4): 754-761.
Output Impedance Analysis for Circulating Current Minimization of Paralleled Three Phase Four Leg Inverter
Chen Yihan Shen Qian Ren Lei Gong Chunying
(College of Automation Engineering Nanjing University of Aeronautics & Astronautics Nanjing 210016 China)
Compared to three-phase three-leg inverter, the control of three-phase four-leg (3P4L) inverter could be decoupled to be able to work with unbalanced load. In recent years, parallel inverter has been widely used in power electronic converter system. If current is out of control in parallel inverters connected with the same input and output buses, circulating current will exist in four legs of parallel 3P4L inverters, which may damage converter seriously. Based on dual closed loop control strategy, output impedance modeling is created in this paper by using small signal modeling method. Thereby, output impedance analysis about the relationships between control loop parameters, main circuit and output impedance is accomplished. Accordingly, a design method is proposed to minimize circulating current. Finally, simulation and experimental results verify the analysis method.
Parallel three-phase four-leg inverter, average current control, zero-sequence circulating current, 3rd harmonic injection
TM46
陈轶涵 男,1982年生,讲师,研究方向为航空电源系统及其控制。
E-mail: merman_3603@hotmail.com(通信作者)
沈 茜 女,1992年生,硕士研究生,研究方向为航空电源系统及其故障诊断与预测技术。
E-mail: shenqiannuaa@163.com
国家自然科学基金资助项目(51377079)。
2014-03-10 改稿日期 2014-04-26