计及系统稳定性和电磁特性的电动机聚合方法
2016-10-11戴丽丽黄小庆曹一家张志丹许雅婧
戴丽丽,黄小庆,曹一家,张志丹,许雅婧
(湖南大学电气工程学院,长沙 410082)
各电动机转子侧的输出功率Poi、转子铜耗Pri分别为
计及系统稳定性和电磁特性的电动机聚合方法
戴丽丽,黄小庆,曹一家,张志丹,许雅婧
(湖南大学电气工程学院,长沙410082)
针对传统电动机聚合方法没有考虑电动机转子电磁暂态特性的不足,该文提出了一种计及系统稳定性和电磁特性的电动机聚合方法。首先,分析影响电力系统稳定性的主要电动机参数,并以这些参数组成特征向量,将电动机群分为系统稳定性好和稳定性差的两组;其次,根据各电动机的实际运行工况,综合考虑电动机转子电磁、机械特性,求解聚合电动机的运行滑差,进而求解聚合电动机的电气参数;最后搭建IEEE9节点系统对该方法进行仿真验证。结果表明,相对于传统容量加权法以及同调动态聚合方法,将原电动机群聚合成单台电动机时,文中方法聚合精度最高,且计算量比同调动态聚合法小;同时,通过聚类采用两台等值电动机模拟原电动群,比单台等值电动机的误差更小,其动态响应曲线几乎与原电动机群吻合。
电动机聚合;系统稳定性;运行工况;电磁特性;机械特性
感应电动机是电力负荷(特别是工业负荷)中最重要的动态成分,其模型参数对电力系统仿真精度,尤其是对暂态稳定仿真精度[1],有着重要的影响。鉴于电动机数量庞大、类型众多、地点分散的特点,且受计算机存储容量、计算时间的限制,在实际的仿真过程中,既无必要也不可能对供、配电网络上的所有电动机进行一一建模,通常用单台或两台等值电动机模拟一群电动机的负荷特性[2]。
电动机的聚合在满足一定精确度的同时,追求算法简单,计算量小,但这两者之间往往存在矛盾。迄今为止,国内外对电动机的聚合进行了大量的探讨研究。文献[3]通过电动机参数修正电动机的加权因子,进而求解聚合电动机的参数。文献[4]假设电动机堵转,对电动机的稳态等值电路等效转换后进行聚合。文献[5]基于电动机空载和堵转两种特殊工况下的聚合。
以上方法都未考虑电动机的电磁暂态特性。文献[6]指出对于大型的电动机,q轴暂态电势是电动机动态特性的主导因素。因此,为提高聚合的精确度,对电动机进行聚合时有必要考虑电动机的电磁暂态特性。文献[7]基于同调性对电动机的机电暂态模型进行动态聚合,为简便称呼,下文中的同调动态聚合皆指该方法。同调动态聚合法提高了一定的精确度,但该算法复杂,计算量大,且其聚合精确度受参数初始值的影响较大。
当电动机特性差异较大时,为更精确地模拟原电动机群,可先对电动机群进行分组,再分别对每一组电动机进行聚合。电动机的动态特性与其参数密切相关,当电动机参数不同时,其系统稳定性也不一样。同时,电动机各参数对系统稳定性的影响大小也各不相同[8]。
基于以上分析,本文提出一种计及系统稳定性和电磁特性的电动机聚合方法。该方法不但提高了聚合精确度,而且参数聚合的程序简单,计算量小。
1 三阶暂态感应电动机模型
1.1感应电动机的等值电路
感应电动机三阶机电暂态模型的等值电路如图1所示。
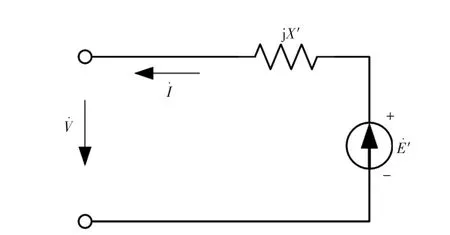
图1 感应电动机三阶暂态等值电路Fig.1 Transient equivalent circuit of induction motor
感应电动机的定子电阻一般很小,可忽略不计,即定子电阻R1=0。感应电动机的三阶机电暂态的微分方程为
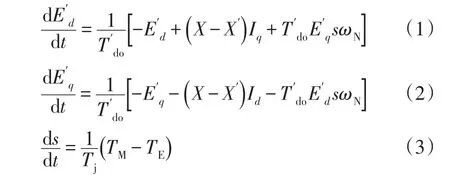
式中:E'd、E'q分别为转子暂态电势的d、q轴分量;X=X1+Xu,X'=X1+X2Xu(/X2+Xu),X1、X2、Xu分别为定子电抗、转子电抗、励磁电抗;s为运行滑差;Tj、T′do分别为转子惯性时间常数和定子暂态开路时间常数;ωN为同步角速度。以上所有的参数皆是以电动机自身的容量基准下的标幺值。式(1)~(2)是转子回路电磁暂态过程的微分方程。式(3)为转子机械暂态过程的微分方程。
1.2感应电动机的初始求解
在已知各电动机的负荷大小及其电气参数的前提下,对电动机群进行聚合。由于各电动机的参数是以其自身容量为基准值,且其容量基准可能存在差异。因此,在聚合之前,应先统一电动机的基准。在此基础上,对电动机进行初始化,求解各电动机的初始滑差s,暂态电势E',为后续的电动机聚合奠定基础。
1)基准转换系数K的求解
电动机阻抗由本身基准下的标幺值转换到系统基准下的标幺值的转换系数K为

式中:SN为电动机额定容量;SB为系统基准容量。
2)初始滑差s的求解
初始滑差s可通过电动机的负载率求解得到。感应电动机的负载率LFM为电动机实际吸收的功率与其额定容量的比值[9],即
P=LFMPN(5)式中:P为电动机实际吸收功率;PN为电动机的额定有功功率。
忽略定子电阻,电动机实际吸收功率为

式中:R=R2s,其中R2为电动机的转子电阻;Xsm=X1+Xu,Xp=X1X2+X1Xu+X2Xu。
结合式(5)和式(6)从而可直接通过电动机的负载率求解出各电动机的初始运行滑差s。
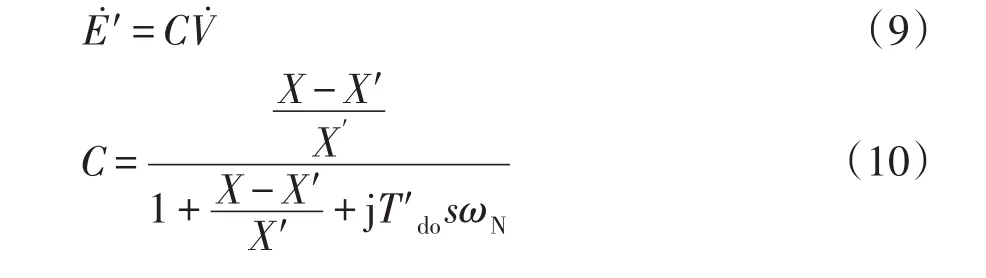
3)暂态电势E'的求解

由电路图1可知电动机定子侧电流为

则可求出各电动机的暂态电势Ė′为
2 感应电动机聚合
2.1聚合电动机初始滑差的计算
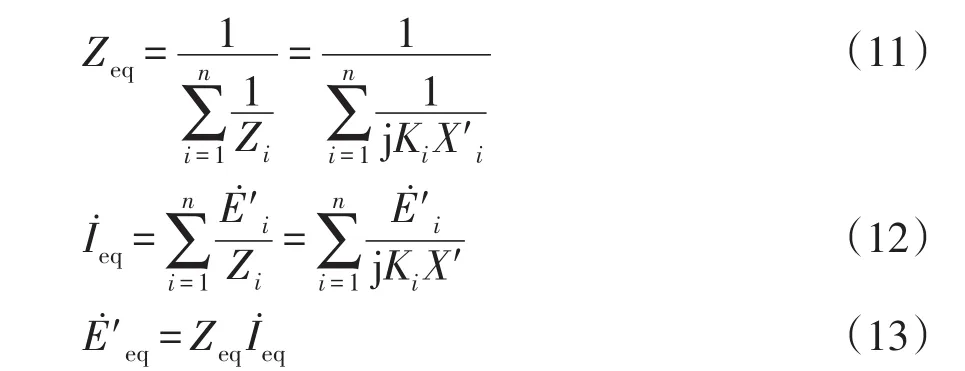
假设n台电动机连接在同一母线下,如图2所示。经转换系数Ki,各电动机的阻抗为统一基准下的标幺值,基于戴维南等效定理,聚合电动机的等效阻抗Zeq、等效电源E′eq分别表示为
各电动机转子侧的输出功率Poi、转子铜耗Pri分别为

从电动机的等值电路可看出,各电动机转子侧的输出功率Poi为

从而可得到各电动机转子侧消耗的铜耗Pri为

根据聚合前后电动机消耗的转子铜耗相等,则有

式中,Preq为聚合电动机转子铜耗。
在第1.2节求得各电动机的初始滑差s,暂态电势E′的基础上,通过式(18)则可得到聚合电动机的初始滑差seq。通过综合考虑电动机的机电暂态特性,即转子机械特性和转子电磁暂态特性,求解聚合电动机的初始滑差,将有利于提高聚合的精确度。
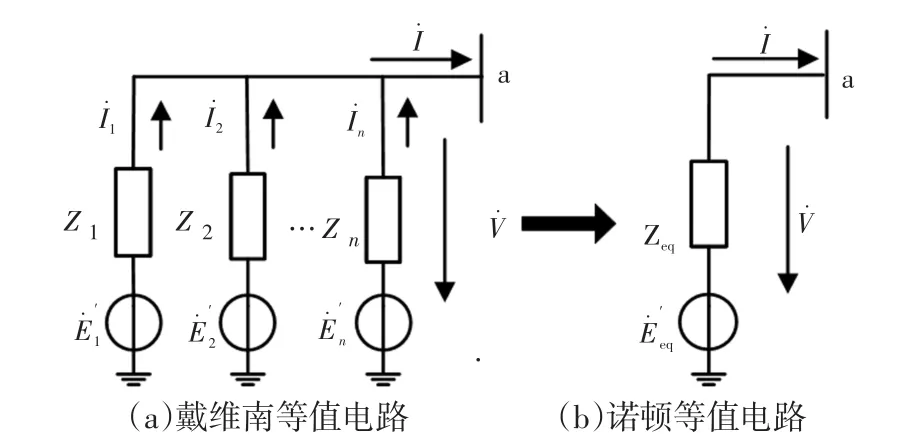
图2 同一母线下n台电动机暂态等值电路Fig.2 Transient equivalent circuit of n induction motors on the same bus
2.2聚合电动机电气参数的计算
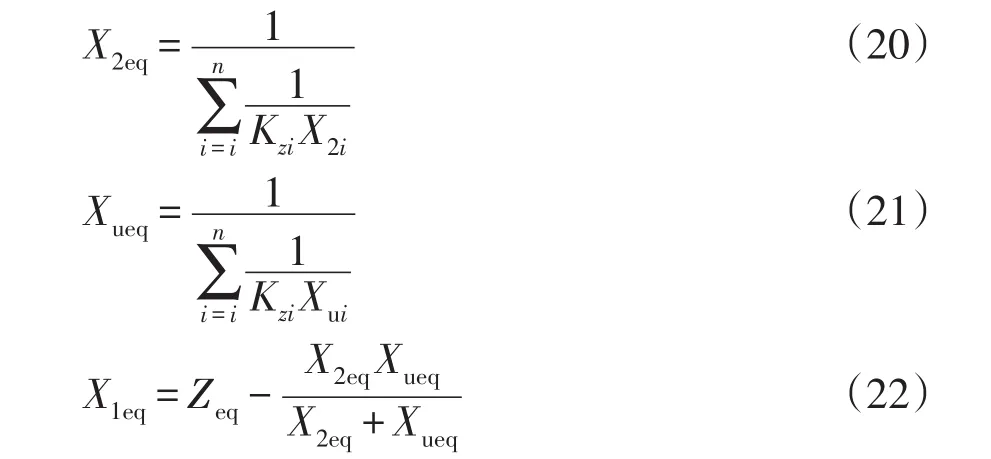
图2(b)的诺顿等值电路如图3所示,则聚合电动机的等效阻抗可进一步表示为

式中,X1eq、X2eq、Xueq分别表示聚合电动机的定子电抗、转子电抗、励磁电抗,且有

式中:Pi为各电动机从电网吸收的有功功率;SiN为各电动机的额定容量。根据式(6)则可求出聚合电动机的转子电阻R2eq,则聚合电动机的所有电气参数都求解出来。
聚合电动机的负载率LFMeq为
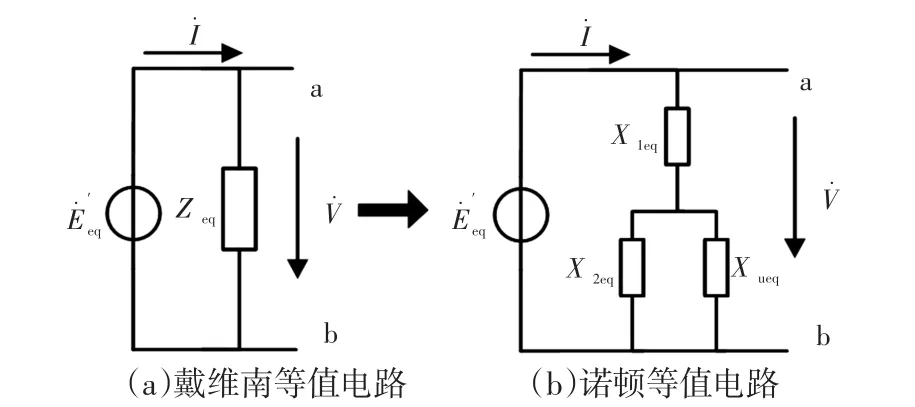
图3 聚合电动机的诺顿等值电路Fig.3 Norton equivalent circuit of the aggregate induction motor
2.3聚合电动机惯性时间常数的计算
假设聚合前后电动机转子的动能相等,有

式中:SiN为各电动机的额定容量;Hi为各电动机的惯性常数;Sagg为聚合电动机的额定容量。根据式(24)和式(25)可求出聚合电动机的惯性常数Hagg。
我国通常习惯用惯性时间常数,惯性常数与它有两倍的关系,即Tj=2H。
3 感应电动机聚类分组
电动机参数不同,其系统稳定性也不相同,且各参数对系统稳定性的影响大小也各不相同。本文通过筛选对系统稳定性影响较大的几个关键电动机参数作为特征向量,对电动机进行聚类,分成系统稳定性好和稳定性差的两组。通过关键参数的选取,既可以反映该系统的稳定性,从而保证聚类的有效性,也可减少计算量。
3.1特征值的选择
聚类效果的好坏与特征值的选取有密切的关系,特征值选取的不当会造成分类无效[10]。大量文献研究[11-12]表明:电动机参数对电力系统稳定性的影响大小依次为初始滑差、转子电阻、定子电抗和转子电抗,且转子电阻越大,系统越稳定,而定子电抗、转子电抗越大,稳定性越差。据此得出电动机的临界滑差scr为

能综合反映出转子电阻、定子电抗、转子电抗等电气参数对系统稳定性的影响,且对系统稳定性的影响较大。由此可知,初始滑差和临界滑差对系统的稳定性影响较大,通过这两者可以整体地反映系统的稳定性。同时,文献[13]指出初始滑差s和临界滑差scr对电动机的聚合结果具有较大的影响。
基于以上分析,本文选用初始滑差和临界滑差作为电动机聚类的特征向量,从而将系统稳定性好的电动机聚类为一组,系统稳定性差的电动机聚为一组。
3.2聚类算例
为了验证该方法的有效性,本文采用文献[3]中的6台电动机进行验证,6台电动机的输入特征向量如表1所示,通过谱系数聚类[14]后的结果如图4所示。由图4可知,前4台电动机归为一组,后两台电动机归为一组,与文献[3]中改进型的分组结果相一致,从而验证该方法的有效性。文献[15]的研究表明大型电动机有利于系统稳定,相比于电动机1~4的民用电器,电动机5、6为工业电动机,属于大型电动机。且由表1可看出,电动机5、6的初始滑差较低,临界滑差较高,该系统稳定性较高,与文献[15]的结论相一致,进一步证明该分组的合理性。

表1 6台感应电动机的特征向量Tab.1 Eigenvector of 6 induction motors
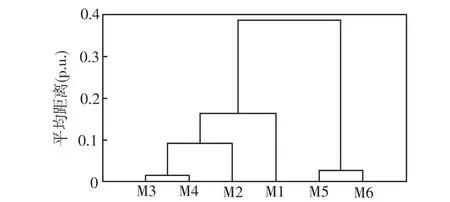
图4 6台电动机分类结果Fig.4 Classification results for 6 induction motors
4 算例分析
4.1仿真场景
以IEEE9节点系统为例,母线A,母线C和母线2接恒阻抗负荷,在母线B处连接一台变压器带一110 kV母线,多台不同类型的电动机直接接在110 kV的母线上,如图5所示。其中,母线A上输出有功功率PA=1.25 p.u.、无功功率QA=0.7 p.u.;母线C上输出有功功率PC=1 p.u.、无功功率QC= 0.55 p.u.;母线2上输出有功功率P2=0.35 p.u.、无功功率Q2=0.01 p.u.;母线BM上输出的有功功率功率PBM=0.696 p.u.、无功功率QBM=0.56 p.u.。
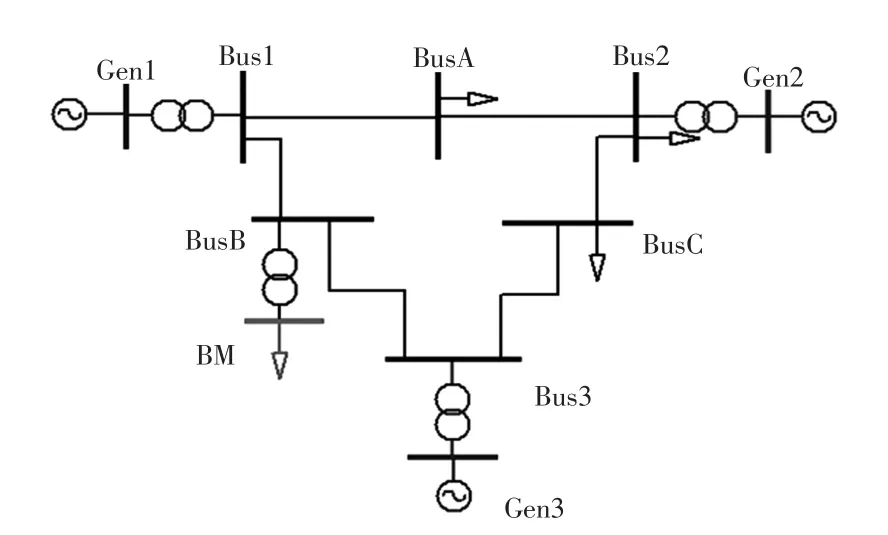
图5 IEEE9节点系统Fig.5 IEEE9 power system
4.2电动机分类及其聚合结果
本文选取12台IEEE典型电动机参数[16],这12台电动机的差异较大,如表2所示。为方便比较本文聚合方法与容量加权法、同调动态聚合法的精度,分别采用这3种方法将这12台电动机聚合成单台电动机,聚合后的电动机参数如表3中M1、M2、M3所示。其中,M1为采用容量加权法获得的单台等值电动机,M2为采用同调动态聚合方法获得的单台等值电动机,M3为采用本文的聚合方法获得的单台等值电动机。
以初始滑差和临界滑差作为电动机聚类的特征向量,经过谱系数聚类后的结果如图6所示。根据谱系数聚类原理[14],类与类之间的距离越小,相似度越大。由图6可以看出电动机5、6、11、12的平均距离较小,电动机特性相似度较大。因此,可将这4台聚为第1组,剩下8台电动机聚为第2组。分组后,采用本文的聚合方法对这两组电动机进行聚合,聚合后的电动机参数如表3中M31和M32所示,其中M31为4台电动机聚合成一台电动机的参数,M32是剩下8台聚合成一台电动机的参数。

表2 12台IEEE典型电动机模型参数Tab.2 Parameters of 12 IEEE typical induction motors p.u.
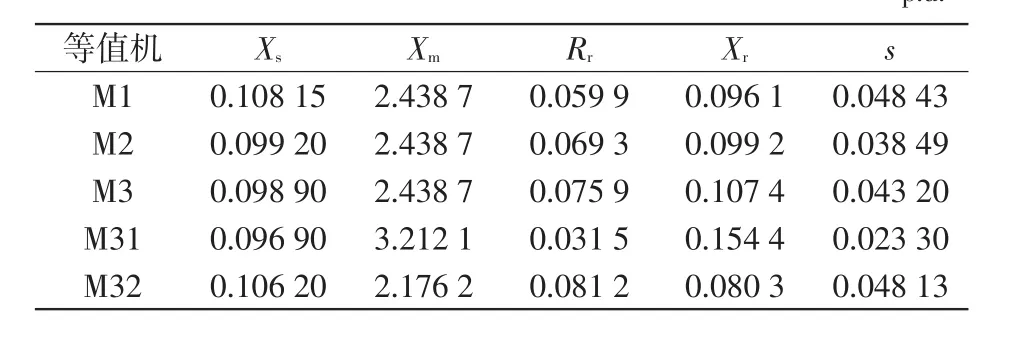
表3 聚合电动机的参数Tab.3 Parameters of the aggregate induction motors

图6 12台电动机分组结果Fig.6 Classification results for 12 induction motors
4.3暂态仿真结果与分析
故障设置:0.2 s在线路bus3-busC接近母线3处发生三相短路,0.3 s切除故障。采用PSASP 6.28软件进行仿真。与原始系统相比,几种方法仿真结果的有功功率、无功功率、母线电压、发电机功角及角速度的相对误差如表4所示。限于篇幅,本文只取母线电压、发电机功角、及角速度的仿真图做比较分析,如图7和图8所示。其中,原始曲线是指12台电动机的仿真曲线;容量单台是指采用容量加权法的单台等值电动机的仿真曲线;同调单台是指采用同调动态聚合法的单台等值电动机的仿真曲线;本文单台是指采用本文聚合方法的单台等值电动机的仿真曲线;本文两台是指采用本文方法的两台等值电动机的仿真曲线。

表4 几种方法的误差比较Tab.4 Comparison of fitting error among four methods
由图7和表4的结果可看出,分别采用容量加权法、同调动态聚合法,本文方法将这12台电动机聚合成单台等值电动机,本文方法的聚合精度最高,尤其在发电机功角曲线上,提高较大精度,分别由容量加权法的0.161 5和同调动态聚合法的0.144 3降到0.115 8。与同调聚合法相比,本文方法不但提高了聚合精度,同时参数聚合程序简单,节省了计算时间。
为验证本文电动机分组的有效性,图8给出了采用本文聚合方法下的单台等值电动机和两台等值电动机的仿真曲线对比。结果表明,以初始滑差和临界滑差作为特征向量,采用谱系数聚类对电动机群进行分组后,采用两台等值的电动机模拟原电动机群,与单台等值电动机相比较,精确度具有显著的提高,发电机功角的相对误差由单台的0.115 8降到0.030 5。
此外,由表3中的M1、M2、M3可发现,3种聚合方法下的单台等值电动机的定子电抗,励磁电抗,转子电抗的聚合结果相差很小,主要区别在于初始滑差跟转子电阻。相对电动机的其他电气参数,电动机初始滑差、转子电阻对暂态稳定的影响较大[11]。因此,在电动机聚合时,聚合电动机初始滑差、转子电阻的求解对聚合结果的精确度具有重要的影响。由此可知,本文聚合方法的精确度提高的最主要因素在于对电动机的初始滑差、转子电阻的求解。
经分析,本文提出的感应电动机聚合方法的精确度提高的具体原因如下。
(1)初始滑差的求解更符合实际运行情况。以往聚合方法是先基于特殊运行工况求解电动机的参数,进而求解聚合电动机的初始滑差。本文直接根据各电动机的实际运行工况,并综合考虑了电动机转子机械特性和转子电磁特性求s,因此精度更高。
(2)聚合电动机的参数求解,其中包括转子电阻。以往的聚合方法是基于特殊的运行工况下,如堵转或空载,获得聚合电动机的电气参数。而本文是先通过求解聚合电动机的初始滑差,在此基础上,再求解聚合电动机的各电气参数,从而在一定程度上提高了精确度。
(3)作为同样基于电动机机电暂态模型聚合的方法,本文方法比文献[7]的同调动态聚合精度更高,很大程度上是由于同调动态方法的精确度受参数初始值的选择影响较大,且对于不同的电动机群,很难按经验确定初始值。而本文的聚合方法通过代数方程求解即可得到聚合电动机参数,无须给出初始值。
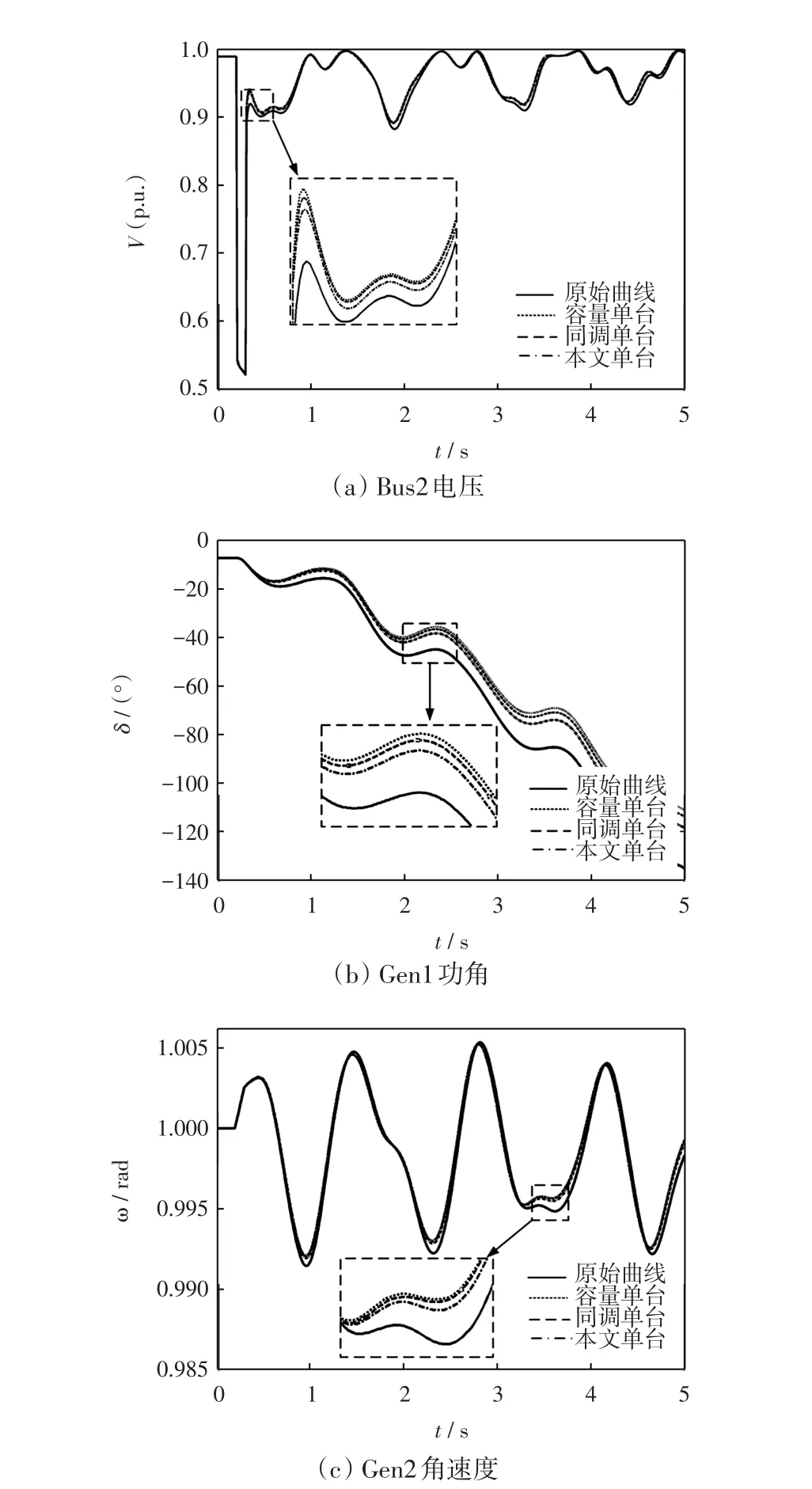
图7 3种聚合方法的单台等值电动机仿真曲线对比Fig.7 Simulation results comparison of one aggregate induction motor among three methods

图8 本文聚合方法的单台等值电动机与两台等值电动机的仿真结果比较Fig.8 Simulation results comparison between one aggregate induction motor and two aggregate induction
5 结语
本文提出一种计及系统稳定性和电磁特性的感应电动机聚合方法。根据系统的稳定程度,以初始滑差和临界滑差组成特征向量,对电动机群进行分组;然后,根据电动机实际运行工况,并综合考虑了电动机转子电磁、机械特性,对电动机进行聚合。通过搭建IEEE9节点系统对该方法进行验证。结果表明,与容量加权法、同调动态聚合法相比,本文方法的聚合精度较高;且与同调动态法相比,本文算法更简单;更进一步地,相比于单机等值电动机,采用两机等值电动机模拟原电动机群,精度显著提高。动态响应曲线几乎与原电动机群吻合。
实际运行中,电动机是分散在配电网各个角落,与变电站主母线的距离不等。而本文研究仅考虑同一母线上电动机的聚合,对电动机进行聚合时将造成一定的误差。下一步将致力研究配电网对电动机聚合的影响,以提高聚合的精度。
[1]Pereira L,Kosterev D,Mackin P,et al.An interim dynam⁃ic induction motor model for stability studies in the WSCC[J].IEEE Trans on Power Systems,2002,17(4):1108-1115.
[2]赵兵,汤涌,张文朝(Zhao Bing,Tang Yong,Zhang Wenchao).感应电动机群单机等值算法研究(Study on single-unit equivalent algorithm of induction motor group)[J].中国电机工程学报(Proceedings of the CSEE),2009,29(19):43-49.
[3]侯俊贤,汤涌,张红斌,等(Hou Junxian,Tang Yong,Zhang Hongbin,et al).感应电动机的综合方法研究(Study on integration method for induction motor)[J].电网技术(Power System Technology),2007,31(4):36-41.
[4]Franklin D C,Morelato A.Improving dynamic aggrega⁃tion of induction motor models[J].IEEE Trans on Power Systems,1994,9(4):1934-1941.
[5]Louie K W,Marti J R,Dommel H W.Aggregation of in⁃duction motors in a power system based on some special operating conditions[C]//IEEE Canadian Conference on Electrical and Computer Engineering.Vancouver,Cana⁃da,2007:1429-1432.
[6]Ahmed-Zaid S,Taleb M.Structural modeling of small and large Induction machines using integral manifolds[J]. IEEETransonEnergyConversion,1991,6(3):529-535.
[7]张剑,孙元章,徐箭,等(Zhang Jian,Sun Yuanzhang,Xu Jian,et al).基于同调性的电动机动态聚合方法(A dy⁃namic aggregation method for induction motors based on their coherent characteristics)[J].电力系统自动化(Au⁃tomation of Electric Power Systems),2010,34(5):48-52.
[8]孙华东,周孝信,李若梅(Sun Huadong,Zhou Xiaoxin,Li Ruomei).感应电动机负荷参数对电力系统暂态电压稳定性的影响(Influence of induction motor load pa⁃rameters on power system transient voltage stability)[J].电网技术(Power System Technology),2005,29(23):1-6.
[9]张景超,张承学,鄢安河,等(Zhang Jingchao,Zhang Chengxue,Yan Anhe,et al).基于自组织神经网络和稳态模型的多台感应电动机聚合方法(Aggregation of multi induction motors based on the self-organized neu⁃ral network and steady state model)[J].电力系统自动化(Automation of Electric Power Systems),2007,31(11):44-48,86.
[10]王文生,王进,王科文(Wang Wensheng,Wan Jin,Wang Kewen).SOM神经网络和C-均值法在负荷分类中的应用(Application of SOM neural network and C means method in load classification)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2011,23(4):36-39.
[11]郑竞宏,李康,朱守真(Zheng Jinghong,Li Kang,Zhu Shouzhen).暂态稳定分析中负荷模型主导参数研究(Dominant parameters of load model in transient stabili⁃ty analysis)[J].电力自动化设备(Electric Power Auto⁃mation Equipment),2009,29(9):1-6.
[12]赵兵,汤涌(Zhao Bing,Tang Yong).感应电动机负荷的动态特性分析(Dynamic characteristics analysis of in⁃duction motor loads)[J].中国电机工程学报(Proceed⁃ings of the CSEE),2009,29(7):71-77.
[13]郭金川,余贻鑫,黎鹏,等(Guo Jinchuan,Yu Yixin,Li Peng,et al).计及负载率和临界滑差的改进感应电动机加权聚合(An improved weighting-mean aggregation method of induction motors considering load rates and critical slips)[J].电力系统自动化(Automation of Elec⁃tric Power Systems),2008,32(14):6-10.
[14]李黎(Li Li).基于聚类分析的负荷数据分类方法的研究(The Studies on Classified Methods of Load Data Based on Clustering Techniques)[D].北京:华北电力大学电气与电子工程学院(Beijing:School of Electrical and Electronic Engineering,North China Electric Power University),2004.
[15]Tanneeru Sirisha,Joydeep Mitra,Patil Yashwant J,et al. Effect of large induction motors on the transient stability of power systems[C]//39th North American Power Sympo⁃sium.Las Cruces,USA,2007:223-228.
[16]鞠平,马大强.电力系统负荷建模[M].北京:中国电力出版社,2008.
Aggregation Method of Induction Motors Considering System Stability and Electromechanical Transient Characteristics
DAI Lili,HUANG Xiaoqing,CAO Yijia,ZHANG Zhidan,XU Yajing
(College of Electrical&Information Engineering,Hunan University,Changsha 410082,China)
As the traditional aggregation approach of induction motors does not consider the rotor’s electromagnetic characteristics,an improved method considering system stability and transient model is presented.First,by abstracting the parameters which have a crucial influence on system stability as the characteristic vectors,motors are classified into two subgroups,one subgroup with good system stability,and the other with bad system stability.Secondly,according to the operation condition of individual motor,the slip of equivalent motor is obtained based on the rotor’s electromagnet⁃ic and mechanical characteristics.Then electrical parameters of equivalent motor are calculated based on the slip.Final⁃ly,this method is verified by IEEE 9-bus system.Simulation results show that the proposed method has a higher preci⁃sion to simulate the original individual motors than the classical weighted method and the coherent dynamic method,and fewer calculations than the coherent dynamic method.In addition,two equivalent motors is much more accurate than one equivalent motor,the dynamic curves of two equivalent motors almost match the original motors.
induction aggregation;system ability;operational states;electromagnetic characteristics;mechanical characteristics
TM7
A
1003-8930(2016)02-0015-07
10.3969/j.issn.1003-8930.2016.02.003
戴丽丽(1989—),女,硕士研究生,研究方向为负荷建模、灵活互动智能用电技术。Email:dai_lili@foxmail.com
黄小庆(1981—),女,通信作者,博士,讲师,研究方向为弹性负荷与电网的相互关系研究、微电网和电力系统自动控制技术。Email:huang_xq@126.com
曹一家(1969—),男,博士,教授,博士生导师,研究方向为电力系统稳定与控制、进化计算与计算智能和智能控制系统与决策。Email:yijiacao@zju.edu.cn
2013-12-24;
2015-05-11
国家高科技研究发展计划(863计划)项目(2012AA050217);国家自然科学基金重点资助项目(51137003);国家电网公司科技项目(2011B-11)
