基于模板的无人机机动动作建模与仿真*
2016-09-21张万鹏
王 淼,张万鹏,陈 浩
(1.国防科技大学机电工程与自动化学院,长沙 410073;2.解放军94801部队,浙江 嘉兴 314013)
基于模板的无人机机动动作建模与仿真*
王淼1,2,张万鹏1,陈浩1
(1.国防科技大学机电工程与自动化学院,长沙410073;2.解放军94801部队,浙江嘉兴314013)
研究了常用的无人机机动模板构建和机动动作生成算法,构建了基于控制量的基本机动模板,以低空跃升攻击动作为例,对动作进行了分解,将此机动动作的各部分利用基本机动模板进行拼接,并对其进行了仿真。结果表明,算法可依据任务和无人机控制约束将模板拼接成可行的机动动作,从而较大程度地提升了无人机机动动作设计的灵活性。
无人机,机动模板,控制算法,机动动作
0 引言
无人机(Unmanned Aerial Vehicle,UAV)是航空技术的重要发展方向,其中无人作战飞机处于军事研究领域的前沿。无人作战飞机已逐步担负起综合打击、对地火力压制等战术任务,其飞行机动动作生成技术也逐渐成为航空领域的研究热点。同时,这一技术也可应用于有人驾驶飞机的驾驶员辅助决策系统,以减轻飞行员在作战中的负担[1]。本文对UAV机动动作的生成控制算法进行了研究,分析了基于模板拼接的机动动作生成步骤,实现了将基本机动模板进行组合,形成新的机动动作的算法流程。
1 机动模板建模
文献[2]总结了很多从实战经验中提炼出的战术飞行动作,如:直线飞行、盘旋、俯冲、半筋斗、半滚倒转、战斗转弯、急盘旋、蛇形机动等,这些动作加以组合可以生成更为复杂的机动动作。所有动作的数学模型基础都是飞机的运动方程,其中控制变量的选取是生成机动动作的关键,其决定了机动在任务执行过程中的转换和各运动参数的变化。本文基于控制变量建立UAV的机动模板。
1.1无人机三自由度运动方程
UAV是一个极其复杂的系统,其本身可看作一个弹性体,同时在飞行过程中,其消耗性载荷又使得UAV可以看作质心位置随时间变化的变质量体。其惯性项也因其动力、操纵系统等因素的影响变得更为复杂[3]。另外,因机型参数不同,UAV的气动外形、飞机姿态和飞行参数的复杂函数也表现为不同的数值[4]。因此,针对UAV的飞行仿真往往需要进行模型简化,常用的运动模型有三自由度质点运动模型和六自由度模型。三自由度方程只考虑飞机的受力特性,输入简单,计算量小,并且可以很好地反应UAV的航迹特征简化建模过程[5]。因此,本文使用三自由度动力学方程对UAV飞行机动动作进行仿真[6]。
UAV的航迹可使用若干个速度矢量V→来标记,将V→可分解为V(速度大小)、θ(航迹倾斜角)和φ(对应速度矢量的航向角)3个变量,得到三自由度质点动力学方程如下:
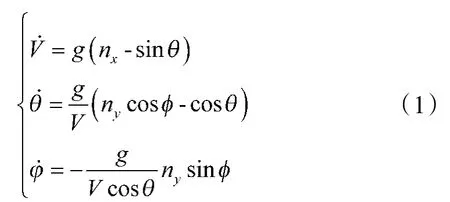
其中,φ为绕速度轴的滚转角,nx、ny分别为对应于气流坐标系下的切向过载和法向过载。飞机的位置随着时间的推进而变化,因此,根据φ、nx、ny随时间变化的值,可以求得V、θ和φ。
将UAV质心速度沿地理坐标系的3个轴分解,可得
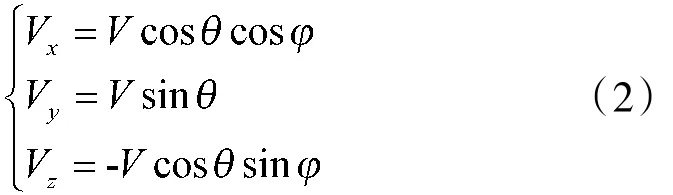
同时,有

x、y、z分别为纬度、经度和高度,将Vx、Vy、Vz取数值积分即可得到UAV的航迹地理坐标。结合式(1)和式(2),可以将φ、nx、ny作为控制变量,通过设计这3个变量随时间的变化规律,建立UAV机动动作模型。
1.2无人机基本机动模板
在UAV执行任务时,其航行线路可由多个基本的机动模板组成,地面控制人员针对不同的任务目的选取、设计相应的机动模板,如俯冲、跃升、盘旋等。
表1列出了几种基本的机动模板以及其作用[7]。

表1 基本机动模板及其应用
除表1中几种基本的机动模板外,常用的机动方式还包括筋斗、大迎角飞行、半滚倒转,以及蛇浪、置尾、反跟踪等复杂机动方式[8]。在UAV执行任务的过程中,若只使用以上某一种机动完成突防突击等任务几乎是不可能的。因此,需要将这些基本机动模板进行组合、拼接,形成其他复杂的机动动作。
1.3模板拼接约束
在实际的作战过程中,随着战场态势的变化,需要不断调整、拼接机动动作,让UAV适时地从前一动作退出,进入下一机动动作[9]。动作拼接需要满足两个方面的因素:其一是动作前后的状态量必须相同,即:

式(4)中,Qi为当前动作退出时状态量,Qj为下一个机动动作进入时的状态量。每一状态量有6个参数,如Qi=<Xi,Yi,Zi,Vi,θi,φi>分别对应位置(X,Y,Z)和速度(V,θ,φ)。针对模板拼接约束,本文在对基本机动动作进行建模时,设计了进入段和退出段,每一机动都从平飞状态进入,退出时又退出至平飞状态,从而确保前后两个机动动作可以有效拼接。
其次,使用<nx,ny,φ>作为控制UAV状态量变化时,由于UAV在实际的飞行过程中<nx,ny,φ>是不能突变的,因此,要根据实际情况,不仅要对控制量的最大最小值进行设定,还要对控制量的变化率进行约束。
2 机动动作生成算法
将机动模板组合而成的动作应用于UAV的作战当中,需要根据作战原则和战术的合理性,建立与之对应的有实际作用的算法模型[10]。本文将重点研究如何以UAV基本的机动模板为基础,以模板使用规则为依据构建有效的机动动作。
UAV的机动动作生成的主要思路:首先根据任务和模板选择规则,由系统给出相应的机动动作交由操作人员参考,最终确定是否使用此机动动作,若有效,则将这几个基本动作模板根据先验知识确定其参数限值。然后,设定前后机动的退出和进入条件,从模板拼接约束和飞机性能等方面检查方案合理性。最后,将控制参数结合质心运动方程得到机动动作飞行轨迹。基本机动模板组合生成机动动作的流程如图1所示。

图1 机动动作生成流程
机动动作组合需要根据战场的态势来确定飞行高度、速度、方位,并且随着战势的变化随时调整机动模板组成,这一调整可以通过地面控制人员完成,也可由UAV自主完成。本文采用的方法是,由系统软件根据任务需求,依据模板选择规则,推理出由多个基本机动模板组成的一个或者几个机动动作,再由领域专家确定使用何种动作来做进一步的参数确定。表2中列举了UAV机动模板选取的部分规则[7]。
综上所述,将机动模板组合成UAV的机动动作,首先要进行机动动作任务目的的判断,同一类型的机动动作具有类似的模式和参数,将此模式和参数进行规范化处理,就可以设计出针对某种特定任务的典型战术动作。根据以上规则选择多个机动模板,再由操作人员判断选择的模板是否适合当前状态,确认后进入机动拼接阶段。
在设计飞行动作时,不但要考虑飞行任务的完成,还需要将飞行的安全性、可操作性和飞机本身的性能约束加以考虑。同时,由前一飞行动作向下一动作进行转换时,还需对飞机的控制量(包括发动机最大推力、最大升力系数、飞机敏捷性等)进行限定[11]。机动模板的行动是对象的行动,每个行动参数可调,如俯冲(速度、俯冲角)、跃升(速度、爬升角)、水平转弯(角度、角速度)、半筋斗(高度、径向半径)等。本文以低空跃升攻击机动为例,对该机动动作的模板组成进行分析和仿真。

表2 UAV基本机动模板选用规则
3 低空跃升攻击机动动作建模
3.1低空跃升攻击动作解析
假定敌方阵地已部署高炮、地空导弹等防空火力,若UAV不采用任何战术机动长驱直入实施攻击,势必降低UAV的生存可能且难以完成攻击任务。因此,UAV首先在低空(300m~1 000m)大速度平飞接近目标,与目标距离小于某一阈值后大迎角跃升,达到要求高度调整至平飞状态以投放武器,随后俯冲至低空以降低毁伤概率,最后转弯180°返航。其攻击过程如图2所示。采用这种攻击方法,一方面可增强攻击的突然性,提高我机的生存概率;另一方面可增大攻击武器的侵彻力,提高对目标的杀伤破坏效果。
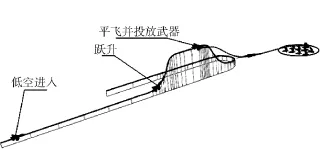
图2 低空跃升攻击示意图
3.2动作生成算法
低空跃升攻击可分为:平飞-跃升-俯冲-转弯4个基本机动动作,在进行模板拼接时,每个机动模板都有各自特定的飞行区段和控制限值,例如:UAV需设定跃升高度,当其机动退出高度减初始高度大于等于跃升高度时,才能转换至下一机动模板。俯冲模板也需要设定俯冲高度并满足条件,才能转换至转弯机动模板。同理,转弯机动需要转弯过设定好的角度才可转换下一机动模板[13]。
3.2.1平飞区段
在平飞区段中,UAV采用在低空或超低空保持一定速度平飞接近目标,使用要求速度和原始速度之差来控制nx,即
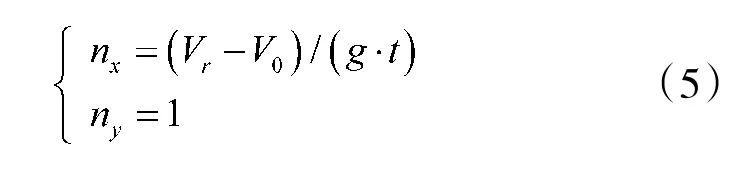
当满足θ=0,φ=0,则说明进入平飞状态,当速度到达要求速度并且符合跃升条件时退出机动。
3.2.2跃升区段
UAV跃升可分为进入段、直线跃升段和退出段,且UAV进入跃升前需指定跃升高度、倾斜角和过载,在进入段,按照指定过载将UAV调整到指定的倾斜角,进入直线跃升段,到达一定高度后将姿态逐渐调整至平飞以退出机动。跃升区段控制算法如表3所示。
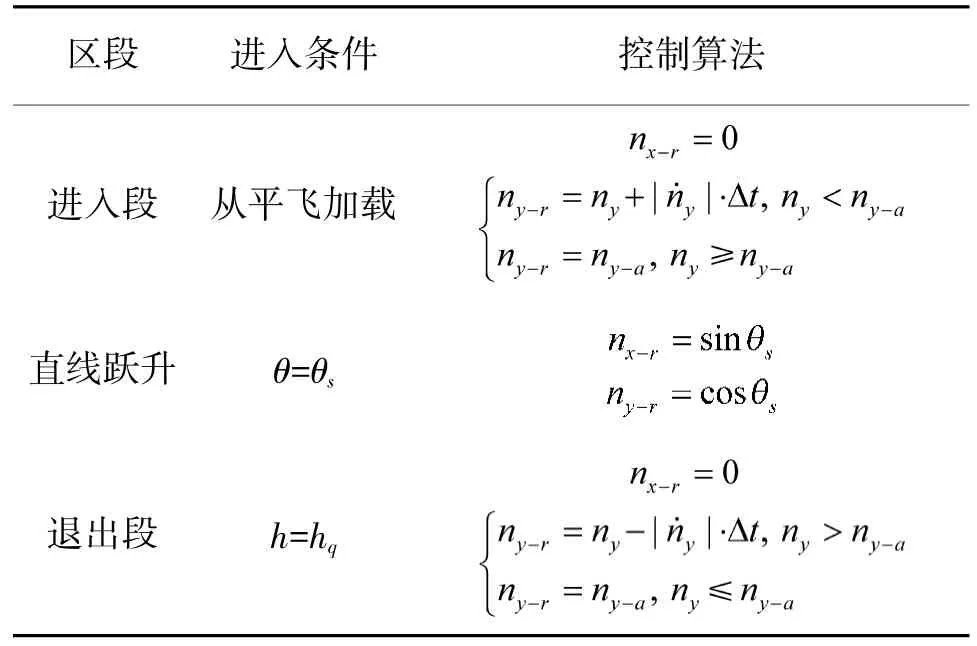
表3 跃升机动模板控制算法
在表3中,nx-r和ny-r分别为控制算法设计的法向过载需求值和切向过载需求值,ny-a为进入段的法向过载设定值,ny-q为退出段法向过载设定值,θs为倾斜角设定值,hq为进入退出段时的高度。从表中可以看出,在进入段,切向过载需求值为0,法向过载需求值随时间线性调整,避免UAV所受合力产生较大突变;当UAV的航迹倾斜角θ=θs时,进入直线跃升段,UAV匀速向上爬升;当UAV高度h=hq时,进入退出段。hq的值与跃升结束高度设定值hs以及退出段UAV上升高度有关。算法实现时,可以先通过仿真计算出退出段UAV上升高度Δh,则hq=hs-Δh。在整个跃升过程中,滚转角φ=0保持不变。
3.2.3俯冲区段
UAV的俯冲区段是用来降低飞行高度,将势能转化为动能的攻击方式,需要满足飞机的最大俯冲角约束和武器性能的约束。与跃升区段相似,俯冲区段也分为:进入段、直线俯冲段和退出段。在进入时,通过增大法向过载使得倾斜角等于要求的俯冲角,从而进入直线俯冲段,俯冲至一定高度时再调整姿态至平飞退出俯冲。在使用俯冲机动模板时,还需要保证在飞机退出机动前其飞行高度不能低于安全飞行高度。俯冲区段控制算法与跃升段类似,如表4所示。
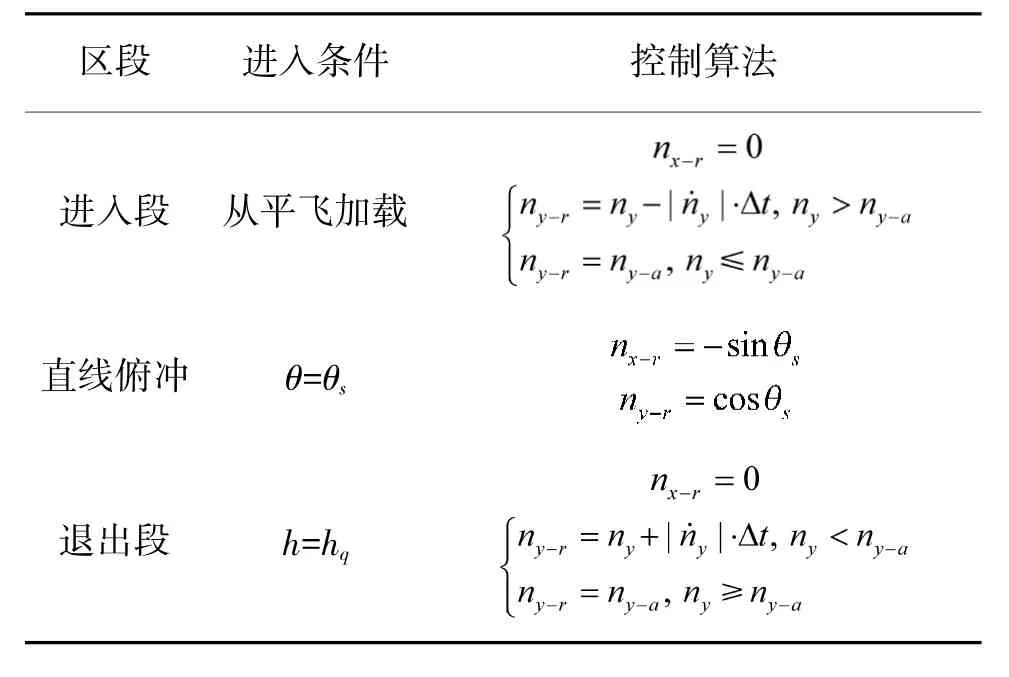
表4 俯冲机动模板控制算法
3.2.4转弯机动模板
在UAV完成攻击任务,俯冲至要求高度,进入低空阶段时,采用转弯机动返航。低空跃升攻击模板中采取水平面内定常转弯,从平飞开始增大滚转角至设定角度,控制飞机的切向和法向过载使飞机转弯,转过要求角度之后,调整至平飞机动退出,其控制算法如表5所示。
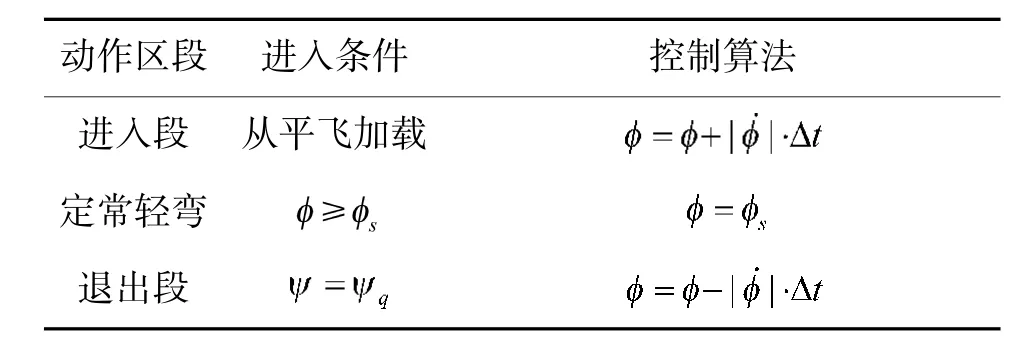
表5 转弯机动模板控制算法
表5中,φs为滚转角设定值。在整个转弯过程中,有

ψq为退出段开始时的转弯角,其值与转弯设定值ψs以及退出段UAV转过的角度有关。算法实现时,可以先通过仿真计算出退出段UAV转过角度Δψ,则ψq=ψs-Δψ。
4 仿真实现
4.1仿真参数设定
根据以上分析,使用Matlab对低空跃升攻击动作进行仿真。
(1)低空进入段:UAV从(125°E,30°N),高度为1 000m的位置以900 km/h的速度平飞进入,匀速飞行10 km。在该段由于匀速飞行,过载nx=0,ny=1 g,滚转角φ=0。
(2)跃升段:UAV以θs=30°的倾斜角直线向上爬升至高度hs=2 500m。在跃升进入段的法向过载设定值ny-a=4 g,进入段调整时间为1 s,退出段的法向过载设定值ny-q=-1 g,调整时间为0.5 s。
(3)平飞段:该阶段UAV平飞并投放武器,仿真假定该阶段匀速平飞25 s。
(4)俯冲段:该阶段降低高度,准备返回。设定UAV以θs=30°的俯冲角其降低至高度hs=500m。在俯冲进入段的法向过载设定值ny-a=-1 g,调整时间为1 s,退出段的法向过载设定值ny-q=3 g,调整时间为0.5 s。
(5)转弯段:该阶段UAV转过180°,设其转弯过载ny-s=3 g,其进入转弯段和退出转弯段的转弯角速率|φ˙|=100°/s。
(6)低空退出段:该阶段UAV方向已调转,仿真设定其低空平飞20 s退出。
4.2仿真结果
仿真结果如图3所示。其中AB段UAV低空平飞进入,BC段UAV跃升至高度2 500 m,CD段UAV平飞搜索目标,发现目标后发射导弹,DE段UAV俯冲至高度500m,EF段UAV进行平飞转弯,掉转航向,FG段UAV低空平飞退出。
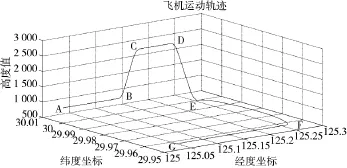
图3 低空跃升攻击仿真结果
5 结论
本文根据UAV的飞行作战需求,对飞机基本的机动模板进行了总结和分析,将简单的机动模板进行组合,成为满足任务需求的复杂机动动作,并且构建了普适性较高的机动动作生成流程。本文以低空跃升攻击机动动作为例,进行了分析和研究,将该机动分解为“平飞-跃升-俯冲-转弯”4个基本动作,对其分别建立了基于控制量的数学模型,并进行了仿真计算。仿真结果表明,这种方法可以对低空跃升攻击较为复杂的机动动作进行仿真,并且可以直观地体现出飞机控制的机动特点。本文方法通过前后状态量的调整,将对应不同飞行特征的基本机动模板有机结合,提高了UAV机动动作规划的快速性与有效性。
[1]沈林成,陈璟,王楠.飞行器任务规划技术综述[J].航空学报,2014,35(3):593-606.
[2]王锐平,高正红.无人机空战仿真中基于机动动作库的决策模型[J].飞行力学,2009,27(6):72-76.
[3]张立鹏,魏瑞轩,李霞.无人作战飞机空战自主战术决策方法研究[J].电光与控制,2012,19(2):92-96.
[4]焦连猛,杨峰,郭善鹏,等.基于机动动作库的飞机航路飞行仿真研究[J].计算机仿真,2011,28(12):73-76.
[5]张翔伦,杨蔷薇.基于机动动作库的实时轨迹生成与仿真研究[J].飞行力学,2008,26(3):29-36.
[6]黄达.基于约束模型的作战飞机战术模板生成和应用方法研究[D].长沙:国防科学技术大学,2009.
[7]王嘉.几种典型机动动作的自动飞行仿真研究[D].西安:西北工业大学,2007.
[8]朱秋芳.歼击机超机动飞行控制及多机协同多目标攻击技术研究[D].南京:南京航空航天大学,2007.
[9]李嘉林,胡孟权.飞机常规机动仿真的过载控制模型设计研究[J].飞行力学,2013,31(3):213-216.
[10]LIX R,JILKOV V P.Survey ofmaneuvering target tracking-partV:multiple-modelmethods[J].IEEE Transactions onAerospaceandElectronicSystem,2005,41(4):1255-1321.
[11]杨莉,安红.作战飞机机动飞行航迹仿真建模研究[J].微计算机信息,2011,27(11):132-134.
[12]杨勇.无人机对移动目标实时动态定位研究与实现[J].四川兵工学报,2014,34(3):137-140.
[13]董彦非,张旺,崔巍.有人机/无人机协同空地攻击效能评估的综合指数模型[J].火力与指挥控制,2015,40 (2):58-62.
[14]薄涛.格斗空战行为建模技术研究[D].长沙:国防科学技术大学,2002.
Modeling and Simulation on Maneuvering Actions of UAV Based on Template
WANGM iao1,2,ZHANG Wan-peng1,CHEN Hao1
(1.School of Mechatronics and Automation,National University of Defense Technology,Changsha 410073,China;2.Unit94801 of PLA,Jiaxing 314013,China)
This paper has studied the common maneuvering actions of unmanned aerial vehicles,put forward the generation algorithm of actions and structured the basic model ofmaneuvering template based on the control algorithm.As a typical example,this paper set up themathematical controlmodel of the low-altitude leap attack maneuvering action.The result has shown that the control algorithm could transform the combined typical templates into a feasible maneuvering action,according to the mission and the property of the UAV.The algorithm has also promoted the elasticity ofmaneuvering action design.
UAV,maneuvering template,controlalgorithm,maneuveringmotion
TP181;E844
A
1002-0640(2016)08-0015-05
2015-06-15
2015-07-20
国家自然科学基金资助项目(61403411)
王淼(1978-),男,湖南湘潭人,硕士研究生。研究方向:空中作战指挥与任务规划。
