基于PC和控制板卡的4D影院动感座椅控制系统的研究
2016-09-19陈润六王红州郑小民邹晓晖王云鸽赵峰惠
陈润六,王红州,郑小民,邹晓晖,王云鸽,赵峰惠
(1.江西省机械科学研究所,江西南昌330002;2.江西工业职业技术学院,江西南昌330002)
基于PC和控制板卡的4D影院动感座椅控制系统的研究
陈润六1,王红州1,郑小民1,邹晓晖1,王云鸽1,赵峰惠2
(1.江西省机械科学研究所,江西南昌330002;2.江西工业职业技术学院,江西南昌330002)
介绍了一种基于PC和控制板卡的4D影院动感座椅控制系统,阐述了该系统的硬件结构、工作原理、功能特点等。系统由电动缸作为执行机构,采用以STM 32为主处理器的控制板卡、施耐德交流伺服驱动器、位移传感器和VR眼镜实现闭环反馈控制和提升用户体验度,具有稳定性好、成本低廉、规模化和智能化等优点。
4D动感座椅;STM 32;电动缸;VR眼镜
随着电影技术和数字技术的发展,先是引起了一股3D电影的热浪,而在近些年来,4D动感电影又将取代3D电影成为新的一种观感体验。这种特殊的电影是将虚拟现实(VR)技术、计算机网络智能控制技术、自动化控制技术和电影艺术相结合的高科技系统工程[1]。目前,国内展览馆、博览馆和科技馆等众多场所都纷纷推出这种集成了当今最新科技的参与性娱乐设施,并且以D-BOX为首的院线级动感座椅也已流行于各大国外市场[2]。
当然,D-BOX类和传统的体验式动感座椅有很大区别。普通体验式动感座椅除了安装动感效果较差的座椅外还配备了花样繁多的感观效果,如前座喷水喷气、扫腿、背部锤击、烟雾和墙面吹风等;而D-BOX类则专注于动感座椅的用户体验和电影画面与动作无缝匹配所带来的感观升华效果。本文所介绍的就是课题组设计的一种新型的用于院线级4D厅的低成本动感座椅及其控制系统,为4D动感电影在国内的院线普及提供了新的动力。
1 动感座椅的机械结构
目前国内外的动感影院采用的动感座椅有三自由度动感座椅和六自由度动感平台两种,三自由度动感座椅可模拟升降、俯仰和摆动三个自由度性质的运动,六自由度动感平台则可以模拟六自由度所有的动作。六自由度动感平台设备由于其结构限制,在影厅内一般只布置一套,而一套设备上可安装的座椅数目一般不超过30个,因此,六自由度动感平台设备应用于规模较小的影厅。三自由度动感座椅则不受限制,一个影厅可随意布置任意数量的座椅设备,一般一个三自由度动感座椅可安装两个座位,影厅可根据需求安装一定数量的三自由度动感座椅设备。随着动感影院规模的扩大,一个影厅安装的三自由度动感座椅设备数目也随之增加,但设备数目的增加也加大了控制难度且成本很高。因此,设计了一套以3-PR(4R)R并联机构为动力输入、3-RCU并联机构为运动输出的动感座椅设备,该套设备的座椅运动性能与市场上3-RPS并联机构式的动感座椅完全相同,而且可以实现一套输入带动多套座椅同时同步运动,如图1所示。其与六自由度动感平台相比,该设备具有座椅数目可任意布置的优点,与3-RPS并联机构式动感座椅相比该设备具有在布置较多数量座椅的情况下需要控制的主动支链非常少的优点。另外,该设备的驱动单元非常少,所以成本更低。3-RPS并联机构式动感座椅的驱动部分安装在支链上,因此,此类设备的每条支链上都需要安装一套驱动装置与一套传动装置,这就造成设备较为复杂,且成本较高。课题组研发的动感座椅设备采用3-RCU并联机构取代3-RPS并联机构,这两种并联机构具有相同的运动性能,而3-RCU并联机构的支链采用圆柱副C与虎克铰U的组合形式替代了3-RPS并联机构支链中的移动P与球铰S的组合形式,取消球铰可以降低设备的加工难度并提高设备的承载能力。3-RCU并联机构的驱动为3-PR(4R)R并联机构的动平台,因此,其三条支链都是无驱动的支链,与主动支链相比具有结构简单、制造与装配难度小的优点。
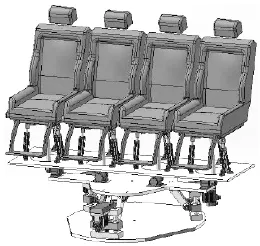
图1 动感座椅机械结构Solidworks仿真图
2 控制系统的组成和工作原理
4D动感座椅的控制系统一般由几个部分构成:上位计算机、控制部分、伺服系统和传动系统。其中,控制部分根据不同的控制器可以分为多个类型的控制方式,有PC+PLC系统、PC+运动控制卡系统、嵌入式系统和单片机系统等。其中,PLC因受工作方式的限制,被控电机不可以在高频下工作,而这恰恰是动感座椅实现细腻动态模拟所需要的关键性能,一般用于点位控制和单轴运动[3];运动控制卡系统主要采用DPS(digital signal processor)控制器作为核心,其运动数据处理能力强大,是目前国外运动控制领域常见的一种方式,但运动控制主板昂贵,需选用的附件板卡也较多,主要适合于各种不同新机构的调试;而基于通用微处理器的控制系统,速度快、低功耗、芯片集成度高,完全能够满足产品级动感座椅的性能要求。
而如果按照动力源的不同则可将动感座椅分为液压动力传动、气压动力传动和伺服电机传动座椅。其中,采用气压动力传动的动感座椅,具有运动速度不稳定、负载较小的缺陷;而采用液压动力传动虽然负载大,但是运动速度较慢,且有漏油等缺陷。因此,采用伺服电机传动的座椅比前两种方法综合性能更好[4]。
2.1控制器的选择
开发的控制板卡选用的主处理器的是意法半导体公司(ST)开发的STM32F407,其是基于ARM CortexTM-M4内核的32位闪存的微处理器,主频高达168 MHz,具备高性能的信号处理和浮点运算能力。ARMCortex-M4采用单周期32或64位乘法累加(MAC)指令、优化的单指令多数据流(SIMD)运算、饱和运算指令和一个符合IEEE 754标准[53]的单精度浮点单元(floating point unit,FPU)。制作的控制板卡如图2所示。

图2 以STM 32为主处理的控制板卡
2.2伺服系统
本文采用施耐德Lexium 23A交流伺服驱动装置和上海赢浩机电设备有限公司生产的电动缸。Lexium23A交流伺服驱动装置的特点概述如下:给定值的2通道模拟输入端(+/-10V)和脉冲接口;通过集成HMI(装有调试软件的PC)进行调试;Jog、电子齿轮、内部位置模式、速度控制和力拒控制运行模式;通过CANopen通讯控制。
伺服电动缸是将伺服电机与丝杠一体化设计的模块化产品,将伺服电机的旋转运动通过丝杠转换成直线运动,同时将伺服电机最佳优点精确转速控制、精确转数控制、精确扭矩控制转变成精确速度控制、精确位置控制、精确推力控制,实现高精度直线运动系列的全新革命性产品。
2.3工作原理
用Microsoft Visual Studio 2010应用程序开发环境编写出PC用户界面,读取预先编制好的VR眼镜的视频动作编码,通过以太网将命令发送给STM32控制板卡,经过D/A模块转换后,输出模拟量信号给交流伺服驱动器,驱动电动缸工作,最终得到不同的动感座椅特效动作。采用带位移反馈的闭环控制是系统所必须的,由位移传感器进行实时采样得到的各缸当前位置经A/D模块转换后反馈给STM32控制板卡,如图3所示。

图3 控制系统结构框图
3 通讯方式和软件设计
3.1通讯方式
本文采用CANopen总线用于控制板卡与交流伺服驱动装置的通讯。CANopen协议是由CiA协会针对CAN协议的不完整性而定义出的一个更高层次的协议——应用层协议。一个CANopen设备模块可分为3部分,如图4所示。通信接口和协议软件用于提供在总线上收发通信对象的服务;不同CANopen设备间的通信都是通过交换通信对象来完成的,这一部分直接面向CAN控制器进行操作。对象字典描述了设备使用的所有数据类型、通信对象和应用对象;对象字典位于通信程序和应用程序之间,用于向应用程序提供接口。应用程序对对象字典进行操作,即可实现CANopen通信。它包括功能部分和通信部分,通信部分通过对对象字典进行操作实现CANopen通信,而功能部分则根据应用要求来实现[5,6]。

图4 CANopen设备模型
在CANopen网络系统中每个节点都有唯一的一个对象字典,而且每个节点的对象字典都具有相同的结构,但具体的内容要根据不同的设备而定,包含了描述该设备及其网络行为的所有参数。CANopen协议还定义了4种报文(通信对象),用于对不同作用的信息进行处理,分别为管理报文(NMT)、服务数据对象(SDO)、过程数据对象(PDO)和预定义报文或特殊功能对象。
3.2软件设计
控制板卡的开发环境是Keil公司开发的MDKARM集成开发平台,将可用于三轴、四轴、六轴的控制算法集成到卡内,便于用户进行二次开发。它适用于基于Cortex-M系列、Cortex-R4等处理器的嵌入式设备的完整开发平台,为微处理器应用设计提供一个完善的C/C++开发环境,具有行业内领先的ARM C/C++编译工具,带有较小封装的实时操作系统Keil RTX,带有μVision4 IDE、调试器和仿真环境,符合Cortex微控制器软件接口标准CMSIS等功能特点。
PC程序采用Microsoft Visual Studio 2010应用程序开发环境,其是微软公司面向计算机软件编程人员开发的一套可视化的高效集成环境,是目前最常用的Windows平台应用程序开发环境之一[7,8]。利用其自带的MFC编程向导工具编写C++应用程序,简化了应用程序的开发过程并提高了编程效率,上下位机采用UDP通信协议,下位机固定IP:192.168.0.125,端口号:5000,标志位55,下位机接受数据结构体如下:
注:对于三自由度,取前面三个姿态即可。
typedef struct
{
BYTEmCheck;//标志位(默认为55)
BYTE mCmd;//上位机命令
BYTEmAct;//(默认为0)
BYTEmRev;//(默认为0)
floatmDOFs[6];//六个姿态(α,β,γ,X,Y,Z)
floatmVxyz[6];//速度(默认值为0)
floatmAxyz[3];//加速度(默认值为0)
}DataToDOF;
注:角度姿态(α,β,γ)单位为度,位移姿态(X,Y,Z)单位为米。
下位机接受命令如下:
{
mCmd=0,//正常发送运动参数
mCmd=2,//控制平台回到中立位
mCmd=4,//平台切换到工作态
mCmd=6,//平台由底位上升到中立位
mCmd=7,//平台由中立位落到底位
mCmd=8//保留
};
上位机固定IP:192.168.0.131,端口号:10000,标志位55,上位机接受数据结构体如下:
typedef struct
{
BYTEmCheck;//标志位
BYTE status;//下位机状态
BYTE mAct;//特效(默认为0)
BYTEmRev;//保留(默认为0)
float attitude[6];//下位机实际姿态
float th_attitude[6];//下位机理论姿态
float para[6];//下位机状态
}DataToUpper;
上位机接受命令如下:
enum NET_CMD
{
status=0,//平台停止
status=1,//平台正在回中位,此时不响应上位机命令
status=2,//平台在中位
status=3,//工作态,可正常发送运动参数
3.3显示器设备
本文采用的显示器设备是VR(虚拟现实)眼镜。VR技术是当今世界前沿学科之一,是国外国防高科技重点发展的关键技术,主要用于军事和航空器视觉模拟等,近年来众多国际大公司纷纷投入到VR民用领域。VR眼镜具有沉浸性、交互性和构想性,使人们能够沉浸其中,形成交互效能多维化的信息环境[9]。因而采用VR眼镜作为体验动感座椅动作特效对控制方法的检验是尤为关键的。VR眼镜中配套的影片带有动作编码,将动作编码导入到编写好的PC软件中,再由软件的数据处理模块得到各缸的运动数据即可实现动感座椅的实时动作。
4 结束语
本文研制的4D影院动感座椅控制系统以STM32为主处理器开发的控制板卡为基础,采用了带有位置反馈的闭环控制模式,既提高了系统运动控制的稳定性和可靠性,又保证了位置控制的精度。动感座椅能实现升降、俯仰和摆动三个自由度性质的运动,可以模拟电影中各种运动场景。采用VR眼镜能够提升用户体验度,从而增加用户再次体验的可能性。实验表明:该系统工作稳定,成本低廉并与布置的座位数成反比,有非常大的市场应用潜力。
[1]赵畅,张嵘.三自由度动感电影系统研制[J].电气自动化,2006,28(1):64-66.
[2]谭笑间.D_BOX动感座椅影院系统概述[J].现代电影技术,2012,55(2):34-36.
[3]卢冠军.一种多核嵌入式PLC运动控制系统的研究[D].杭州:杭州电子科技大学硕士论文,2011:7-8.
[4]陈玉龙.基于PC和PLC的4D动感座椅控制系统的研发[D].济南:山东建筑大学硕士论文,2014:2-3.
[5]卞亦文,吴仲诚,戈瑜.基于CAN总线的网络传感器的研究与实现[J].总线与网络,2003,40(5):33-35.
[6]邬宽明.CAN总线原理和应用系统设计[M].北京:北京航空航天大学出版社,1996:60-105.
[7]杨宇.飞行模拟器动感模拟关键技术研究[D].哈尔滨:哈尔滨工业大学,2010:4-7.
[8]黄植功.PC与PLC的串口通讯及编程实现[J].广西物理,2007,28(3):35-38.
[9]蒋庆全.国外VR技术发展综述[J].飞航导弹,2002,32(1): 27-341.
Research on ControlSystem of4-D Cinema Motion Seat Based On PC and ControlBoard
CHEN Run-liu1,WANG Hong-zhou1,ZHENG Xiao-min1,ZOU Xiao-hui1,WANG Yun-ge1,ZHAO Feng-hui2
(1.Jiangxi Institute of Mechanical Science,Nanchang Jiangxi 330002,China;2.Jiangxi Industry Polytechnic College,Nanchang Jiangxi330002,China)
This paper introduced a control system of 4-D cinema dynamic seat based on PC and control board.The hardware structure,working principle and functional characteristics of control system are discussed in this paper. System consists of electric cylinder as the executing agency,while using STM32-based processor control board,Schneider AC servo drive,the displacement sensor and VR glasses to realize closed-loop feedback control and enhance the user experience,with good stability,low cost,large-scale and intelligent and so on.
4-D dynamic;STM32;electric cylinder;VR glassesz
TP242
A
1672-545X(2016)06-0017-04
2016-03-01
江西省科技支撑课题:动感影院用特效座椅设备的研发(项目编号:20151BBE50125)
陈润六(1987-),男,江西九江人,硕士,工程师,研究方向:机械装备的设计及制造研究,机器人控制系统研究。
