铝合金门框自动化加工、上下料和焊接的机器人工作站设计
2016-09-13董世忠
董世忠
(长沙长泰机器人有限公司,湖南 长沙 410117)
铝合金门框自动化加工、上下料和焊接的机器人工作站设计
董世忠
(长沙长泰机器人有限公司,湖南 长沙 410117)
该工作站是一种针对铝合金门框加工生产的机器人系统。主要介绍了机器人在自动化上下料、机加工和焊接等方面的应用,使机器人具备了更多识别、分析、判断能力,解决了机器人替代人工生产作业的问题,且比人工更为精准地完成各类动作。
机器人;上下料;加工;焊接
目前,对铝合金门框生产企业进行调研发现,在生产环节中铝合金门框加工、上下料和焊接均以手工操作为主。在生产中,采用人工操作进行加工作业,人为操作存在一定的误差,特别是加工一些异形槽时,加工的表面粗糙度非常差;采用人工上下料,人工需要不断地进行重复的劳动操作,人工的工作劳动强度大;采用人工焊接,焊接的效率和质量很大程度上受限于焊接工人的熟练程度及操作状态,且焊接后表面粗糙度较差。
针对目前企业铝合金门框多采用人工操作作业的生产情况,本工作站在设计上,主要采用机器人自动化抓取工件,通过自动化控制程序对工件进行切割、钻孔、铣槽、上下料和焊接等,使机器人替代人工完成生产作业,并提高产品质量,提高劳动生产效率。
1 机器人工作站综述
本工作站由焊接机器人、搬运机器人、刀具装置、焊接平台、夹具、滑台、短料台、长料中转台、固定料架、焊接电源、总控制柜、焊接机器人控制柜、搬运机器人控制柜、转运小车等构成,集成了机械、电气、控制、焊接等综合技术的机器人工作站。其中刀具装置、焊接平台、夹具、滑台、短料台、长料中转台、固定料架均在搬运机器人的作用半径内,总控制柜控制刀具装置、焊接平台、夹具、滑台、短料台、长料中转台和固定料架,焊接机器人控制柜控制焊接机器人,搬运机器人控制柜控制搬运机器人。
此系统除了自动化工作模式,还具有单站工作模式,包括机加站单循环模式和焊接站单循环模式。由人员配合,机加工单站可完成工件的机加工,焊接机器人单站可完成焊接。机加站单循环模式:是将加工完成的工件均不再由搬运机器人放到焊接平台,改为堆放到转运小车,以备后用。焊接站单循环模式:人工在焊接平台处上料,按下按钮,夹具装置自动夹紧,机器人开始焊接;焊接完毕,焊接机器人回到初始位置,夹具装置自动打开,人工取出门体。
其工作站结构如图1所示。

2 机器人工作站各组成结构
2.1焊接平台
焊接平台(图2)可对工件实现自动化定位和压紧,自动装夹完成后,焊接机器人接到传递的信息后对工件实施焊接。其中,顶紧装置对工件进行合拢定位,压紧装置对工件进行可靠压紧。
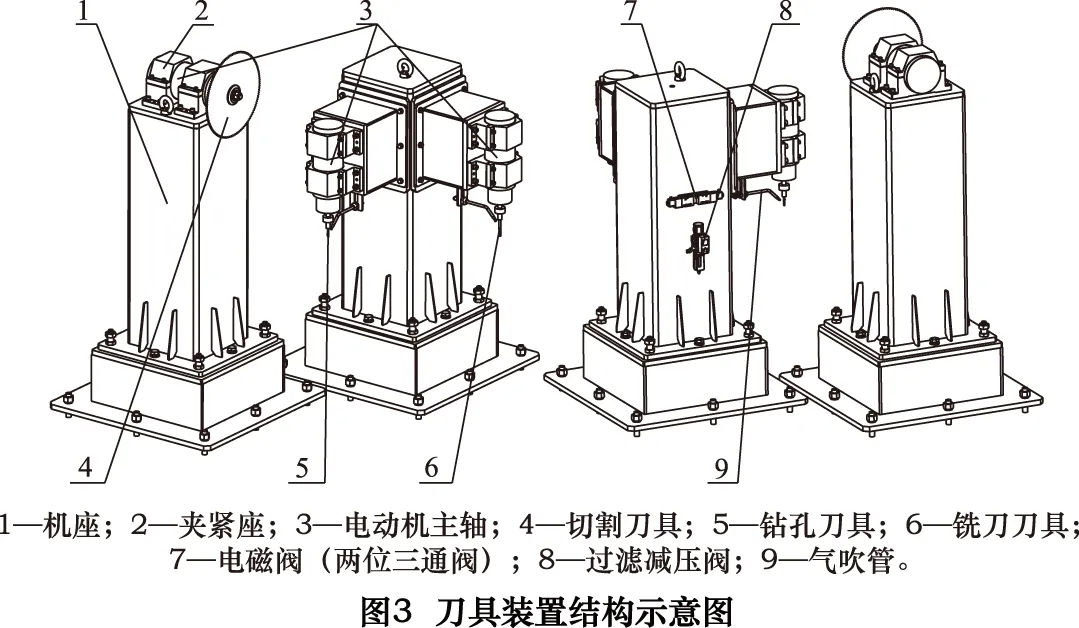
2.2刀具装置
刀具装置能对工件进行自动化切割、钻孔和铣槽,搬运机器人通过变换角度位置在刀具装置上完成工件的快速加工。刀具装置结构如图3所示,其中,电动机主轴通过夹紧座固连在机座上。3个电动机主轴分别安装切割刀具、钻孔刀具和铣刀刀具;水箱对3个电动机主轴进行冷却,以冷却电机主轴在长时间高速旋转产生的热量,可延长电动机主轴的使用寿命。气吹管分别安装在切割刀具处、钻孔刀具处和铣刀刀具处,且气吹管不断地送气对正在进行加工的刀具进行冷却,气吹管的供气由过滤减压阀进行控制。

2.3滑台
滑台主要结构如图4所示。滑台是将工件边框送出工作站外,方便员工在站外进行铰链的安装,起到了保护员工的人身安全的作用,铰链装配完毕后,滑台再将工件边框送回站内,方便搬运机器人的抓取。滑板移进、移出极限位置处分别装有液压缓冲器,可对滑板移进、移出至极限位置时起到缓冲的作用。摆角气缸主要是对工件边框压紧之用。

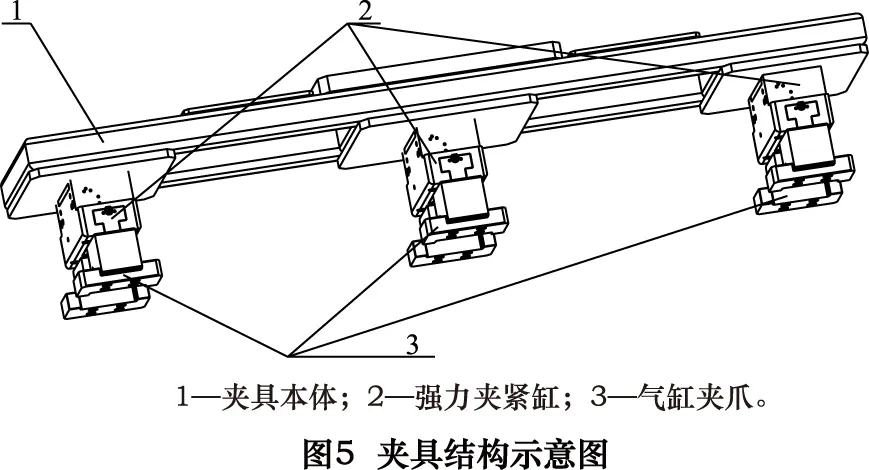
2.4夹具
夹具(图5)可以对工件边框实现快速夹紧,夹持牢固可靠。强力夹紧缸通过两位五通电磁阀进行控制,可同时或单独进行夹紧和松开;强力夹紧缸在压紧时,也通过先导单向阀进行控制,即使在断气时,也可保持一定压力对工件进行压紧;而且夹具安装有压力传感器,当气路断气时,反馈信号给搬运机器人,使其停止工作,消除安全隐患。
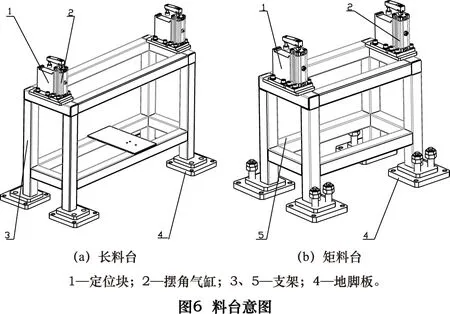
2.5长料台和短料台
长料台和短料台(图6)可对工件边框进行定位,也可实现对工件边框中转的作用。长料台和短料台均是由定位块、摆角气缸、支架和地脚板组成,摆角气缸由两位五通电磁阀进行控制,长料台、短料台及滑台的整个气路压力由单独过滤减压阀进行控制。
2.6固定料架
固定料架(图7)是固定工件边料用的。固定料架在每块工件边料的下方安装有感应传感器,可声光报警提示人工补料。
3 工作站工艺流程
本文详细介绍了工作站的结构组成,其工作站的工艺流程如下:
第一步:人工将L长原材堆放至固定料架(可放多件物料)上。固定料架可自动对齐原材。当缺料时声光报警提示人工补料。

第二步:搬运机器人从固定料架取L长原材,移至刀具装置上切割刀具处进行C度斜切。切割成A1和B1的两段(具体切成多长的两段以实际需要为准,A1+B1=L)。
第三步:搬运机器人将A1的一段放到短料台,摆角气缸将短边框A1压紧,在长料台放下B1的一段调整气爪抓取的位置,重新抓起B1的一段在切割刀具上切去C度角的废料;移动到铣刀工具铣出2个矩形槽和4个ΦF的孔;然后移动到钻孔工具,在2个矩形槽两端钻出共4个φH的孔,由此完成长边框B1的加工。
第四步:搬运机器人将长边框B1放到滑台上,两个摆角气缸将长边框B1压紧,滑台移出,人工开始给长边框B1上铰链。在短料台两个摆角气缸松开短料A1,机器人取出A1的短料,移动到刀具装置切割刀具处切去C度角的废料,短料加工成为短边框A1。
第五步:搬运机器人将短边框A1放到短料台上,然后滑台将装好铰链的长边框B1送回站内。机器人抓取长边框B1放到焊接平台上,气缸压紧长边框B1,再将短边框A1放到焊接平台上。
第六步:机器人返回固定料架重复第二步(搬运机器人从固定料架取L长原材,移至刀具装置上切割机处进行C度斜切。切割成A2和B2的两段(具体切成多长的两段以实际需要为准,A2+B2=L)。
第七步:搬运机器人将B2的一段放到长料台上。再放下A2的一段,调整气爪位置,重新抓起A2的一段。然后在切割刀具上切去C度角的废料,再将其放到焊接平台上。
第八步:搬运机器人抓起B2的一段移动到切割刀具,切去C度角。调整气爪位置,然后到铣刀工具铣出锁孔槽,最后由机器人将长边框B2放到焊接平台上。
第九步:启动焊接平台上的气缸,夹紧门体的四个边框。焊接机器人开始焊接门体。焊接完成后,机器人取出门体在转运小车上码垛。
系统循环反复运行。
4 信息管理控制系统
信息管理控制系统包括电弧监控系统和控制系统。
4.1电弧监控系统
对系统内焊接机器人的焊接电流、焊接电压进行实时监控,当出现异常时,系统自动记录,并报警。
4.2控制系统
本控制系统采用欧姆龙PLC,由PLC控制设备(预留10组I/O接口)逻辑动作;配备报警灯。CPU自带编程接口,配置输入输出模块,通过标配的RS422通信接口与触摸屏监控系统通讯。
采用PLC控制,各专机可分别单独控制,实现单独手动、自动生产,同时可全线联线进行自动流水生产。总线设一主控制柜,主柜可紧急停线。
设备运行方式分为自动和手动,控制系统在主控柜设置自动/手动选择开关,配备操作盒的单机设备,在其操作盒上设置自动/手动选择开关。若主控柜选择自动,单机设备操作盒选择自动,那么系统自动运行,单机设备自动运转;若单机设备选择手动,不论系统是自动还是手动运行,在保证安全的情况下单机设备都可以手动操作。此时,与单机设备有交接的设备暂停,不影响系统其它设备自动运行。
5 工作站的特点
在工作站的设计过程中,安全性是工作站的最重要的设计原则。
安全防护主要在设备周围安装急停开关、安全光栅、弧光屏蔽等。
(1)紧急停止设备设置急停按钮,以及在每个操作盘上装有急停按钮,一旦发生意外,周围的人可立即按急停按钮,所有的急停要能实现联锁,都能对整个系统内的移动设备进行紧急停止操作,最大限度地保护操作者的人身和设备的安全。
(2)系统安全措施安装有安全光栅,维护人员或操作工人从转运小车处围栏开口或上料架开口进入时,搬运机器人不能运行,确保人员安全。
(3)弧光屏蔽围栏上方装有弧光屏蔽板,人员经过时防止刺眼。
6 结语
铝合金门框自动化加工、上下料和焊接机器人工作站各组成装置之间无缝结合,各节点实时传递,焊接机器人、搬运机器人系统的控制和整个工作站的控制有机地结合,不仅有效的保障了工作站高效、安全、可靠地运行,而且保障了产品质量,提高了劳动生产效率,提高了使用寿命。也体现出降低工人的劳动强度、减少人员配置、提高设备运行的安全性和利用率等优势,具有良好的社会和经济效益。
[1]胡绳荪.焊接自动化及其应用[M].北京:机械工业出版社,2007:20-25.
[2]陈焕明.焊接工装设计[M].北京:航空工业出版社,2006:3-8.
[3]葛景国.焊接工艺理论与技术[M].北京:机械工业出版社,2007:32-40.
[4]韩国明.柔性机器人弧焊工作站的设计[Z].上海:ABB中国机器人研发中心,2013:52-53.
[5]何京文.焊接机器人工作站应用于研究[Z].北京:首都航天机械公司,2008:14-16.
(编辑汪艺)
如果您想发表对本文的看法,请将文章编号填入读者意见调查表中的相应位置。
Automatic machining, upper and lower material and welding robot workstation design of aluminum alloy frame
DONG Shizhong
(Changtai Changsha Robot Co., Ltd., Changsha 410117, CHN)
This workstation is a robot system for the processing aluminum alloy frame. This paper mainly introduces the application of the robot's upper and lower material, machining and welding. The robot has the ability to recognize, analyze and judge, and solve the problem of robot instead of manual production.
robot; upper and lower material; processing; welding
TG409
A
10.19287/j.cnki.1005-2402.2016.06.005
董世忠,男,1978年生,高级工程师,研究方向为机器人研究及应用,已发表论文7篇。
2015-12-06)
160621
