基于空间分布的三维自动化肺结节分割算法
2016-09-09张俊杰王文文师宏斌
张俊杰,周 涛,夏 勇,王文文,师宏斌
1.宁夏医科大学 理学院,宁夏 银川 750004;2.西北工业大学 计算机学院,陕西 西安 710100;
3.宁夏医科大学总医院 泌尿外科,宁夏 银川 750004)

基于空间分布的三维自动化肺结节分割算法
张俊杰1,周涛1,夏勇2,王文文1,师宏斌3
(
1.宁夏医科大学 理学院,宁夏 银川 750004;2.西北工业大学 计算机学院,陕西 西安 710100;
3.宁夏医科大学总医院 泌尿外科,宁夏 银川 750004)
针对肺结节分割中存在的自动化程度低、较少考虑空间结构以及粘附型肺结节分割不充分问题,提出了一种基于空间分布的三维自动化肺结节分割算法。该算法首先利用C-means聚类算法分割出肺实质,然后根据肺结节空间分布的差异性将其分为3类:孤立性肺结节、胸膜粘附性肺结节、血管粘附性肺结节,并对3种不同类型的肺结节分别采用基于连通性、灰度下降和散度差异的分割算法进行分割,70个肺结节(其中孤立性肺结节38个,血管粘附性肺结节17个,胸膜粘附性肺结节15个)CT图像的实验结果表明,算法能够准确、自动地分割出3种不同部位的肺结节。
肺结节分割;自动化分割;三维分割;医学图像处理
1 肺结节分割方法
近年来,随着空气质量的恶化、二手烟危害的加深、职业因素的影响等原因,肺癌已成为世界范围内发病率及死亡率最高的恶性肿瘤[1],计算机辅助诊断(Computer-Aided Diagnosis,CAD)能够在降低医生工作量的同时提供具有重要参考价值的图像解释信息[2],联合医生进行肺结节的双重筛选,从而辅助医生作出定性判别结果[3],因此,进行CAD研究具有重要的现实意义。目前,计算机断层扫描成像(Computed Tomography,CT)是多种模态医学成像中最能够凸显肺部疾病征象的影像学手段[4],而肺癌最常见的早期形态为肺结节(lung nodules)[5],该阶段正是肺癌患者进行有效治疗的最佳时期[6],因此,利用CT图像进行肺结节的辅助诊断对于肺癌的早期发现具有重要意义。感兴趣区域(Region of Interest,ROI)的精确分割是进行特征刻画和分类识别的重要前提,因此,肺结节分割算法一直是CAD研究的热点之一,国内外众多学者提出了许多新型肺结节分割方法,如Diciotti[5]等提出了一种基于三维测地距离图来进行局部形状分析的分割算法,该算法利用一种自动校正的方法进行了血管粘附性结节的局部优化,提高了近血管结节的分割质量;Dehmeshki[7]等以一个固定的尺寸结合形态学算子方法去除了血管区域,进一步用迭代的方法重建形态学算子,但这种重建会使一部分附着在血管上的小结节体积估算偏大;Santos[8]等利用区域生长法分割出肺实质,并根据高斯混合模型和海森矩阵从肺实质中分离出肺结节;Netto[9]等利用增长型神经气体(Growing Neural Gas,GNG)进行聚类粗分割,然后根据三维距离变换把肺结节从含有血管、支气管的组织中分离出来。然而,目前已有的肺结节分割方法还存在以下不足:
1)分割过程需要人工干预,难以满足自动化的分割要求;
2)较少考虑肺结节与其他组织的毗邻关系,并且对不同类型的肺结节采用相同的分割算法,导致分割误差较大;
3)基于二维图像处理的分割算法通常会丢失空间结构信息,不利于ROI三维特征的提取。
基于以上原因,本文提出了一种基于空间分布的三维自动化肺结节分割算法,该算法首先在三维连通的基础上利用C-means聚类算法分割出肺实质,然后在充分考虑肺结节的空间分布的基础上将肺结节分为3类:孤立性肺结节、胸膜粘附性肺结节和血管粘附性肺结节,最后针对以上3种类型肺结节的灰度分布和几何结构特点,分别采用基于连通性、灰度下降、散度差异的算法进行分割。为了验证算法的有效性和可行性,本文做了5组实验,即肺实质分割实验、孤立型肺结节分割实验、胸膜粘附型肺结节分割实验、血管粘附型分割实验、分割正确率检测实验,实验结果表明,该算法能够比较理想地分割出不同部位的肺结节。
2 肺结节分类
医学图像往往涉及人体各类组织器官,具有数据海量性、灰度模糊性、结构复杂性、噪声显著性等特点,因此,肺结节分割算法不仅要关注阈值的设定,更要探讨目标成像的拓扑结构,本文在基于空间分布的医学划分上进行了更细致的描述[5],如图1所示(图中圆圈区域即为不同类型的肺结节),根据肺结节生长位置的不同将其分为3类:孤立型肺结节、胸膜粘附型肺结节、血管粘附型肺结节。
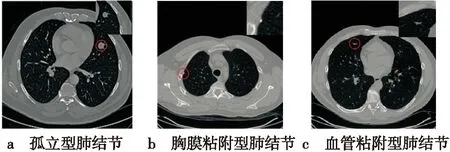
图1 肺结节分类示意图
从单层CT切片来看,3种不同类型的肺结节分别具有以下特点:
孤立型肺结节:结节周围无明显的杂质,通常呈圆形或椭圆形,易于实现二值化分割。
胸膜粘附型肺结节:结节通常表现为气管、支气管、胸膜上的凸起组织,外形不规则,其中胸膜粘附型肺结节与胸膜、心脏等组织灰度极其接近,且灰度值呈小范围、低亮度分布。
血管粘附型肺结节:结节粘附在血管上,与胸膜粘附型肺结节不同的是,该类型结节与血管连接通路的灰度由两极向中间呈下降趋势分布。
3 本文算法
CT序列切片实际是1组三维灰度图像,影像医生一般只对每张断层图像中进行逐一观测,但却缺少Z方向的动态链接,因此,这种CT读片方式会丢失一定的三维结构信息,基于以上分析,本文以三维体素为数字图像运算单元对肺部CT图像进行分割,根据CT图像中肺部成像的结构特点,肺结节分割算法主要包括肺实质分割和肺结节分割两大内容。肺实质分割是去除CT影像中的杂质区域(包括背景、胸腔骨骼、脂肪、肌肉、气管等),只保留对肺结节检测与识别有价值的肺实质部分;肺结节分割是从肺实质(包括肺泡、血管、胸膜等)中分离出3种不同类型的肺结节。本文算法思想如下:
肺实质分割:首先用Otsu算法对肺部CT序列切片进行二值化处理,然后对二值化图像进行三维连通,然后以CT图像中各连通区域与图像中心的距离为特征进行聚类,分割出二值化的肺实质,最后,为避免胸膜粘附型结节在以上处理过程中被删除,则采用形态学算子膨胀二值化的肺实质,并将结果图像与原始灰度图像进行掩模运算,得到具有灰度信息的肺实质。
肺结节分割:首先根据连通区域面积大小从得到的肺实质图像中分离出胸膜区域(胸膜区域为最大连通区域面积,用于提取胸膜粘附型肺结节)和肺内区域(提取孤立性肺结节和血管粘附型肺结节),然后根据医生标记的坐标从肺内区域中分割出孤立性肺结节;分离出的胸膜区域与拉普拉斯算子进行卷积,得到其散度图像,并根据设定的阈值(本文为0.5)分割出散度较大的区域,即胸膜粘附型肺结节;血管粘附型肺结节与血管连通区域的灰度值由两端向中间递减,首先进行局部灰度峰值检测,将这些峰值体素点作为种子点进行灰度值下降的区域生长,最后删除区域生长中的重复区域便可分割出血管粘附型肺结节。
基于以上算法思想,图2给出了该算法的流程图。
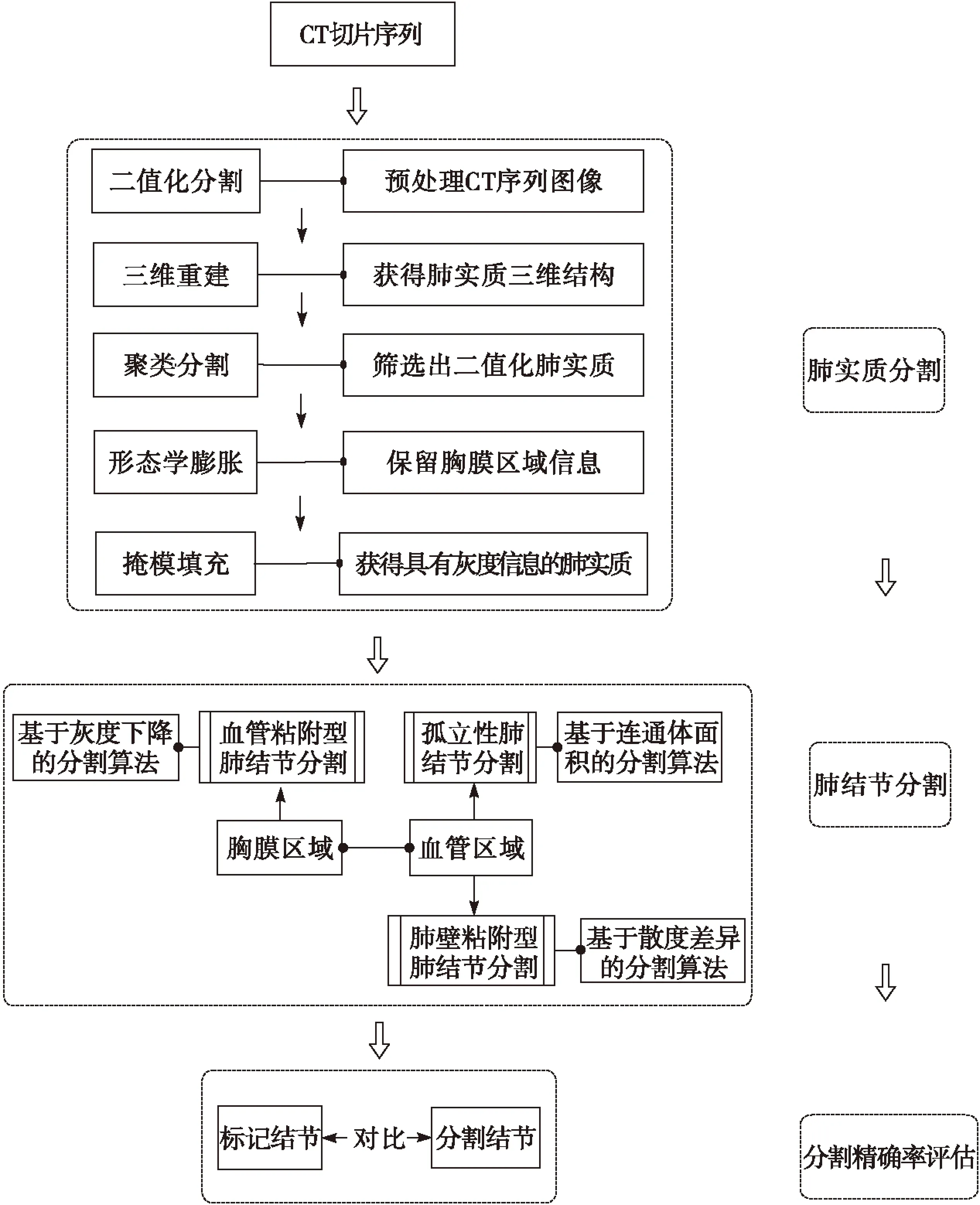
图2 基于空间分布的三维自动化肺结节分割流程图
4 仿真实验
本文实验所涉及的软、硬件环境如下:
软件环境:Windows 7操作系统,Matlab R2014b,ImageJ 1.48u。
硬件环境:Intel Core i5 4670-3.4GHz(CPU),8.0 Gbyte(内存),2.0 Gbyte显存(显卡),500 Gbyte(硬盘)。
实验数据:采用经过影像科医生标记的70例肺结节患者的CT图像(共2 232幅,其中孤立性肺结节38例,血管粘附性肺结节17例,胸膜粘附性肺结节15例)作为实验样本,大小均为512×512,厚度为2 mm。
4.1实验一:肺实质分割
原始的胸部 CT 图像通常包括背景、肺组织、血管、气管、骨骼、脂肪、肌肉等,而真正对肺结节检测与识别有价值的只有肺实质部分,因此,肺实质的精准分割直接影响CAD系统的实际临床应用价值[10]。本文提出分割算法中的肺实质分割主要包括以下5个步骤:
1)图像二值化:采用Otsu 算法对肺部CT序列切片图像(图3a)进行二值化处理,得到二值化肺部CT序列切片图像(图3b)。
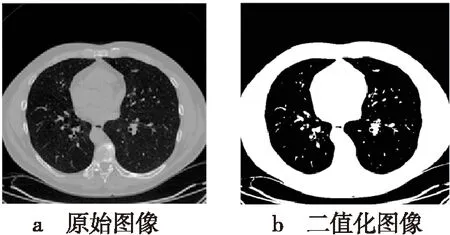
图3 图像二值化
2)三维连通:实现二值化肺部CT序列切片图像的三维方向6邻域(即上、下、左、右、前、后)连通(图4a),重建的肺部三维图像如图4b所示。

图4 三维连通
3)聚类分割:对肺部的三维图像利用C-means进行聚类(连通区域中心点与图像中心点的距离作为聚类特征,各连通区域中心点分布如图5a所示),得到不同的三维连通区域(如肺实质、背景、胸腔轮廓、噪声等),保留由二值化的肺实质构成的三维连通区域,其他区域用“白色”代替。

图5 聚类分割
4)膨胀运算:利用形态学算子对二值化肺实质进行膨胀运算(保留胸膜粘附性结节),形态学膨胀相当于对二值图像中值为1的像素连接区域的进行扩展,用B(x)代表结构元素,对工作空间E中的每一点x,膨胀结果F为
F=E⊗B={x:B(x)⊂E}
(1)
膨胀后得到的三维肺实质轮廓如图6所示。

图6 膨胀运算
5)掩模运算:膨胀后的肺实质轮廓与原始CT图像进行“乘积”掩模运算,得到包含灰度信息的肺实质图像(图7)。

图7 掩模运算
图8给出了部分肺实质的分割结果,图中大圆圈区域为非肺部组织,但其灰度与肺部极其接近,却没有被误分割到肺部区域中去,并且某些切片内肺部没连接到一起的小区域(如小圆圈区域),也能被很好地划分成肺部区域,由此可见,该算法在肺实质分割过程中既没有过分割,也没有遗漏候选区域,这说明该算法对肺实质的分割是极其有效的。

图8 肺实质示例图
4.2实验二:孤立型肺结节分割
孤立型肺结节在3类结节中的所占比例最大,图9是通过三维连通并进行不同颜色标记的孤立型肺结节。
经过肺实质分割过程中的形态学膨胀和组织填充,肺部已变成了带血管和胸膜的凸体,因此只需要再对这个肺部反过来进行与膨胀算子同样大小的形态学腐蚀操作即可得到肺内区域(包括血管、血管粘附型肺结节、孤立型肺结节、肺泡等,如图10a),而被分离的胸膜区域可以作为胸膜粘附型结节分割对象(图10b),然后根据医生标记的坐标在肺内区域中分割出孤立型肺结节,部分孤立型肺结节的分割结果如图11所示。

图9 孤立型肺结节示例图

图10 肺内区域与胸膜分离

图11 孤立型肺结节分割结果
4.3实验三:胸膜粘附型肺结节分割
胸膜粘附型结节与其他两类结节的差异表现在其与胸膜区域的灰度值差异较小(除了胸膜外的肋骨和其他特殊组织),基于灰度的分割方法难以进行有效的分割,通过实验可知,胸膜粘附型肺结节的内部灰度变化为由内向外不断降低,其散度与周围组织存在较大的差异,因此选用散度结果区分胸膜粘附性结节与其周围粘连组织是可行的。三维CT数据x,y,z三个方向的微分量表示该区域向周围扩散的灰度变化,而拉普拉斯算子作为最简单的各向同性微分算子,具有旋转不变性,其特性非常适用于处理该问题,因此本文采用拉普拉斯算子作为滤波器对ROI进行卷积运算计算散度,得到其散度图像(图12b),然后根据对CT数据的测试可知,散度阈值设定为均值0.5时(0和1代表最小和最大的L的值)效果最好,取大于0.5的区域获得胸膜粘附性肺结节(图12c),部分胸膜粘附型肺结节的分割结果如图13所示。

图12 胸膜粘附型肺结节分割示例图

图13 胸膜粘附型肺结节分割结果
(2)
式中:f为ROI灰度值;L为其散度值。
4.4实验四:血管粘附型肺结节分割
为解决血管粘附型肺结节的分割和肺内血管组织粘连的问题,本文采用基于灰度下降的区域生长算法。
如图14所示,分别取“山脉”和“山丘”(“山丘”为结节,如峰1;“山脉”为血管,如峰3)的顶峰作为种子点,进行灰度下降的区域生长(即每个体素只往周围灰度值比它低的点扩散),因此,要完成粘连部分的分割只需将两个生长区域中的重合区域删除(如图14中最下方的深色区域)即可,便可得到血管粘附型肺结节。

图14 基于灰度下降的区域生长算法示意图
为弥补算法对噪声敏感而产生误差,本文首先对图片进行三维高斯平滑滤波,然后采用灰度窗口变换,将灰度值大于l的体素x(M)的灰度值都修改为l
(3)
式中:I(x(M))表示体素x(M)的取值;M是感兴趣区域掩模,是与图像一样规格的逻辑矩阵,值为x(M)表示只访问M中值为l的元素,l的取值如下
(4)
即三维影像感兴趣区域中灰度值小于l的体素个数Nl占该区域总体素个数Nx(M)的比值应大于等于α。根据实验测试,α取0.7效果最好。
处理结果如图15所示(“山丘”及“山脉”的“峰顶”会被剃平),再对整个ROI求区域灰度极大值,便可获得这些“平顶”(此时的峰顶就由单个体素变成了多个体素区域,与其相临体素的灰度值均低于该区域),最后取该区域作为种子点进行灰度下降,便可成功地分离出与血管相连的结节区域,部分血管粘附型肺结节的分割结果如图16所示。

图15 窗口变换后的基于灰度下降的区域生长算法示意图

图16 血管粘附型肺结节分割结果
4.5实验五:肺结节分割结果分析
经过对70例肺结节进行分割提取,并与标记的肺结节数量进行比对,其分割正确率和算法耗时如表1所示。
表1分割正确率和算法耗时

结节类型结节总数/个正确分割数/个正确率/%平均分割耗时/s孤立性肺结节383694.71.8血管粘附性肺结节171694.11.3胸膜粘附性肺结节151493.31.1
由此可见,本文算法的平均分割正确率在93%以上,算法耗时也保持在较低的水平,已基本满足不同类型肺结节的分割提取。
5 小结
本文在分析肺结节分割算法研究现状的基础上,总结出算法研究中存在的3个问题(通常采用二维分割,较少考虑三维空间结构;自动化程度低,需要过多的人工干预;肺结节分类不明确,对不同类型的肺结节采用相同的分割算法),并提出了一种基于空间分布的三维自动化肺结节分割算法,该算法首先剔除杂质区域,分割出具有研究价值的肺实质,然后利用肺结节的空间分布差异性分别采取不同的三维分割提取算法,实验结果证明该算法能够无监督且准确地分割出肺结节,保留了其三维结构信息,对于肺结节的检测与识别研究具有重要意义。
[1]RIAZSP,LÜCHTENBORGM,COUPLANDVH,etal.Trendsinincidenceofsmallcelllungcancerandalllungcancer[J].Lungcancer,2012,75(3):280-284.
[2]THEODORIDISS,KOUTROUMBASK.Patternrecognition[M].NewYork:AcademicPress,2008.
[3]SAHINERB,CHANHP,HADJIISKILM,etal.EffectofCADonradiologists'detectionoflungnodulesonthoracicctscans:analysisofanobserverperformancestudybynodulesize[J].Acadradiol,2009,16(12):1518-1530.
[4]BALDWINDR.Predictionofriskoflungcancerinpopulationsandinpulmonarynodules:significantprogresstodrivechangesinparadigms[J].Lungcancer,2015,89(1):1-3.
[5]DICIOTTIS,PICOZZIG,FALCHINIM,etal. 3-DsegmentationalgorithmofsmalllungnodulesinspiralCTimages[J].IEEEtransactionsoninformationtechnologyinbiomedicine,2008,12(1):7-19.
[6]FERLAYJ,SOERJOMATARAMI,DIKSHITR,etal.Cancerincidenceandmortalityworldwide:sources,methodsandmajorpatternsinGLOBOCAN2012[J].International
journalofcancer,2015,136(5):359-386.
[7]KOSTISWJ,REEVESAP,YANKELEVITZDF,HENSCHKECI.Three-dimensionalsegmentationandgrowth-rateestimationofsmallpulmonarynodulesinhelicalCTimages[J].IEEEtransactionsonmedicalimaging,2003,22(10):1259-74.
[8]SANTOSAM,FILHOA,SILVAAC,etal.Automaticdetectionofsmalllungnodulesin3DCTdatausinggaussianmixturemodels,tsallisentropyandSVM[J].Engineeringapplicationsofartificialintelligence,2014(36):27-39.
[9]NETTOSMB,SILVAAC,NUNESRA,etal.Automaticsegmentationoflungnoduleswithgrowingneuralgasandsupportvectormachine[J].Computersinbiologyandmedicine, 2012,42(11):1110-1121.
[10]李彬,田联房,欧陕兴.恶性肺结节早期诊断智能识别相关技术综述[J].生物医学工程学杂志,2009,26(5):1140-1145.
责任编辑:时雯
Three-dimensional automation segmentation algorithm of lung nodule based on spatial distribution
ZHANG Junjie1,ZHOU Tao1,XIA Yong2,WANG Wenwen1,SHI Hongbin3
(1.SchoolofScience,NingxiaMedicalUniversity,Yinchuan750004,China;2.SchoolofComputerScience,NorthwesternPolytechnicalUniversity,Xi’an710100,China;3.UrinarySurgery,GeneralHospitalofNingxiaMedicalUniversity,Yinchuan750004,China)
In terms of the low degree automation in lung nodules segmentation,the spatial structure is less considered and insufficient segmentation in adhesion nodules,a three-dimensional lung nodules automatic segmentation algorithm based on spatial distribution was put forward. C-means clustering algorithm is firstly used to segment the lung parenchyma, and then lung nodules are divided into three categories according to the difference of the spatial distribution: isolation lung nodules, pleural adhesion lung nodules, and vascular adhesion lung nodules, methods based on connectivity, gray level decrease and the difference of divergence are respectively used to segment lung nodules of three different types, the the experimental results of CT images about 70 lung nodules(solitary pulmonary nodule:38,vascular adhesion lung nodules:17,pleural adhesion lung nodules:15)show that the algorithm can accurately and automatically segment the lung nodules of three different parts.
lung nodules segmentation; automated segmentation; three-dimensional segmentation; medical image processing
TN391
A
10.16280/j.videoe.2016.08.004
国家自然科学基金项目(81160183;61561040);宁夏自然科学基金项目(NZ14085);陕西省语音与图像信息处理重点实验室开放课题项目(SJ2013003)
2015-11-05
文献引用格式:张俊杰,周涛,夏勇,等.基于空间分布的三维自动化肺结节分割算法[J].电视技术,2016,40(8):19-25.
ZHANG J J,ZHOU T,XIA Y,et al. Three-dimensional automation segmentation algorithm of lung nodule based on spatial distribution [J].Video engineering,2016,40(8):19-25.