基于非线性输出频率响应函数的转子碰摩故障诊断方法研究
2016-09-07李志农刁海洋肖尧先
李志农,刁海洋,肖尧先
(南昌航空大学航空制造工程学院,南昌330063)
基础研究
基于非线性输出频率响应函数的转子碰摩故障诊断方法研究
李志农,刁海洋,肖尧先
(南昌航空大学航空制造工程学院,南昌330063)
以碰摩故障为研究对象,将非线性输出频率响应函数(NOFRF)引入到含有碰摩的转子系统故障诊断中。对比分析在转子与定子不同间隙下的转子系统NOFRF值的变化情况,并进行了试验验证。结果表明故障转子系统的NOFRF值对转子与定子不同间隙的变化非常敏感,因此,可以利用转子系统的NOFRF值对碰摩故障的敏感性,不仅可以有效地区分转子系统中的碰摩故障,而且还可以有效地识别转子系统中的碰摩故障的严重程度。
非线性输出频率响应函数;碰摩;故障诊断;转子系统
0 引言
在旋转机械的众多故障中,转子与定子间的碰摩是最常见的主要故障之一,且其产生的原因多种多样,难以排除。一旦出现碰摩,将影响系统力的平衡并产生振动,使得转子的受力情况更加复杂,从而使得系统的非线性特征更加显著和复杂。碰摩使转子与定子间出现摩擦力和冲击力两种作用力,其中冲击力的作用等于附加一个宽带激励于转子系统,其激励成分相当复杂,且该冲击呈非线性非周期出现的特征。在大型机器上一旦出现碰摩,轻者将降低机组的使用寿命,重者产生非弹性形变,引发机毁人亡的重大事故。目前,许多专家学者在碰摩的监测诊断技术方面做了大量的研究工作,且取得有价值的结论[1-12]。如:文献[5]将声发射信号理论引入到转子碰摩故障定位中,对碰摩定位做出一定的贡献;Deng等[6-8]提出在声发射方法中引入最小方差自适应时延估计算法;于英利等[9]将普理论引入到转子碰摩位置的定位研究中;文献[10]通过分析动刚度的变化程度也实现了碰摩故障的定位;Bachschmid等[11]结合最小二乘法的模型诊断理论,并将其应用于多种转子系统故障的定位研究中;李录平等[12]将振动矢量分析的方法用于碰摩故障轴向定位之中。
近年来,基于非线性输出频率响应函数(NOFRF)的故障诊断方法也取得了较快的发展。Lang等[13-16]通过NOFRF辨识方法对振动系统进行分析检测;Peng等[17-20]将NOFRF引入到结构的裂纹故障诊断中;员险锋等[21-22]利用NOFRF对转子裂纹故障进行了有效的诊断识别,为NOFRF做出较大的贡献;韩清凯等[23]将NOFRF运用到转子系统碰摩故障的定位识别当中。
本研究在此基础上,将NOFRF理论引入到转子碰摩的诊断中,提出基于NOFRF的转子碰摩故障诊断方法。通过试验研究分析不同转子与定子间隙下的系统各阶NOFRF值的变化规律,并对其进行试验验证,以实现对碰摩故障的有效诊断。
1 NOFRF理论和辨识算法
假定系统的输入和输出分别是和,则基于该系统的Volterra级数模型的表达式为:

式中,hn(τ1,…,τn)是非线性系统的n阶Volterra核,N设定为此系统的最高阶次,τ为时延,t为时间。
其在频域内可表达为:

其中,用Yn(jω)来表示该非线性系统的第n阶输出频率响应,因此,
其中,Hn(jω1,…,jωn)是该非线性系统的第n阶广义频率响应函数。
将Volterra级数原理引入到具有非线性的多自由度系统中,可得到其NOFRF表达式:

式中,U(jw)是系统输入,N是Volterra级数的最大阶次,阶广义频率响应函数(GFRF)。
根据式(4)中NOFRF定义,式(2)可以进一步重写为
根据式(5),系统的输入输出关系可改写为

其中,G(jω)=[G1(jω),…,Gn(jω)]T。
假定输入信号是u(t)=Au*(t),式中,A是常数,u*(t)是跟随时间变化的变量,则

其中,U*n(jω)为u*(t)的傅里叶变换,
故式(7)可进一步重写为

其中,[G*(jω)]是NOFRF的估计值,在这里,[G*(jω)]=[G*1(jω),…,G*N(jω)]T。
用输入信号Aiu*(t)(i=1,…,M)对该非线性系统进行M(M≥N)次的激励,对系统的输出进行采样,记为Yi(jω),i=1,…,M,则

式中,

由于大于4倍频的频率成分幅值较小,且随着阶次的变大,计算量成倍的增加。所以本研究考虑的只是前4阶的系统频率输出。将式(10)中的输入和输出之间的关系分开表达,其关系式如下:

对式(13)进行分析可以发现,当使用2个幅值不同但频率相同的稀薄信号对非线性系统进行激励时,就可以求出该系统的前4阶NOFRF值。
2 试验研究
研究使用的是可以产生全周碰摩的定子,如图1所示,它有以下特点:安装、拆卸方便;转定子之间的间隙可根据需要进行相应调节,实现不同的试验要求;结构简单、紧凑。在试验中,通过定子内套的改变,可以实现转定子间隙的调节,进而控制转子系统碰摩故障的出现时间以及碰摩程度。

图1 定子结构示意图Fig.1 Schematic diagram of stator structure
图2所示的是转子试验台简易图,在该转子试验台上对具有碰摩故障的转子系统进行试验研究。转轴参数为:转轴长L=480 mm,直径D=10 mm;转盘直径d=80 mm,转盘的质量m=0.812 kg。试验材料泊松比为0.3,杨氏模量为2.06× 1011Pa。通过计算,该转子的一、二阶临界转速分别是31.48、127.07 Hz。在转子上加载的不平衡量为6×10-5kg·m。转子转速设定为3 500 r/ min。对系统的输入和输出值进行同步采样分析,每周采样256点,采样8个周期。
图3所示为无碰摩的转子系统输出频谱图。图中的1×~8×分别代表1~8倍频。从图中可知,当转子系统正常工作时,转子系统的输出频谱图是典型的基频振动,即1倍频成分在频谱图中比较突出,其他倍频成分较为微弱,几乎可以忽略不计。
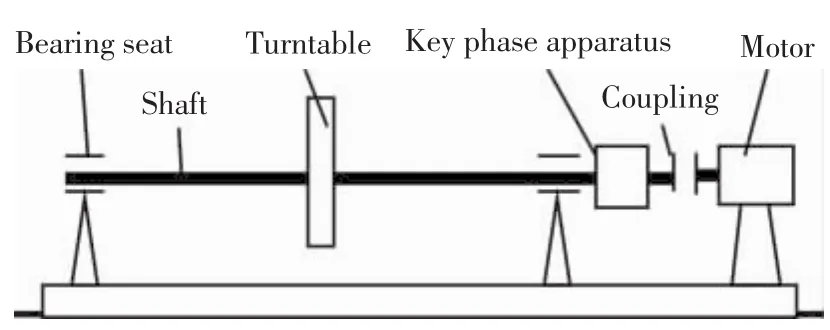
图2 转子试验台示意图Fig.2 Schematic diagram of rotor test rig

图3 正常状态的输出频谱图Fig.3 Output spectrum of normal state
图4是转子系统在不同转子与定子间隙下的系统输出频谱图。当转子与定子之间的间隙δ= 60 μm时,系统的1倍频成分在频谱图中比较突出,其他倍频成分较为微弱,此时系统频谱图特性与图3所示的正常转子系统比较相似,仅通过转子系统频谱图特性很难判断转子系统是否出现碰摩(图4a);当δ=40 μm时,1倍频成分幅值基本不变,2倍频成分已经出现且可以清晰地观察到,而3倍频成分刚开始出现,且幅值并不明显(图4b);当δ=20 μm时,系统的输出频谱图中的1倍频、2倍频、3倍频成分已经明显,而2倍频成分幅值接近1倍频幅值,3倍频成分幅值虽然远小于2倍频,但已经较为明显(图4c);当δ=10 μm时,系统的2倍频成分幅值超过1倍频,3倍频成分幅值也更加明显(图4d)。
再从转子系统NOFRF特性上对该系统进行分析,利用式(13)得到不同转子与定子间隙下的转子系统NOFRF值,如表1所示。数据经过归一化处理,即将得到的转子系统的各阶NOFRF值都除以表中第1行数据G1(jωF),从而得到≤1的数。
通过理论推导可知转子系统正常运行的转轴,应只有一次谐波一阶核值G1(jωF)值不为0,其他各阶NOFRF值都为0,而试验中辨识得到的各阶NOFRF值却都不为0,主要是由于随机信号受到干扰和计算误差导致辨识系统得到这个结果,且从表1中可以看出,转子系统正常运行时,与G1(jωF)值相比,其他各阶NOFRF值都很小,可以忽略不计。
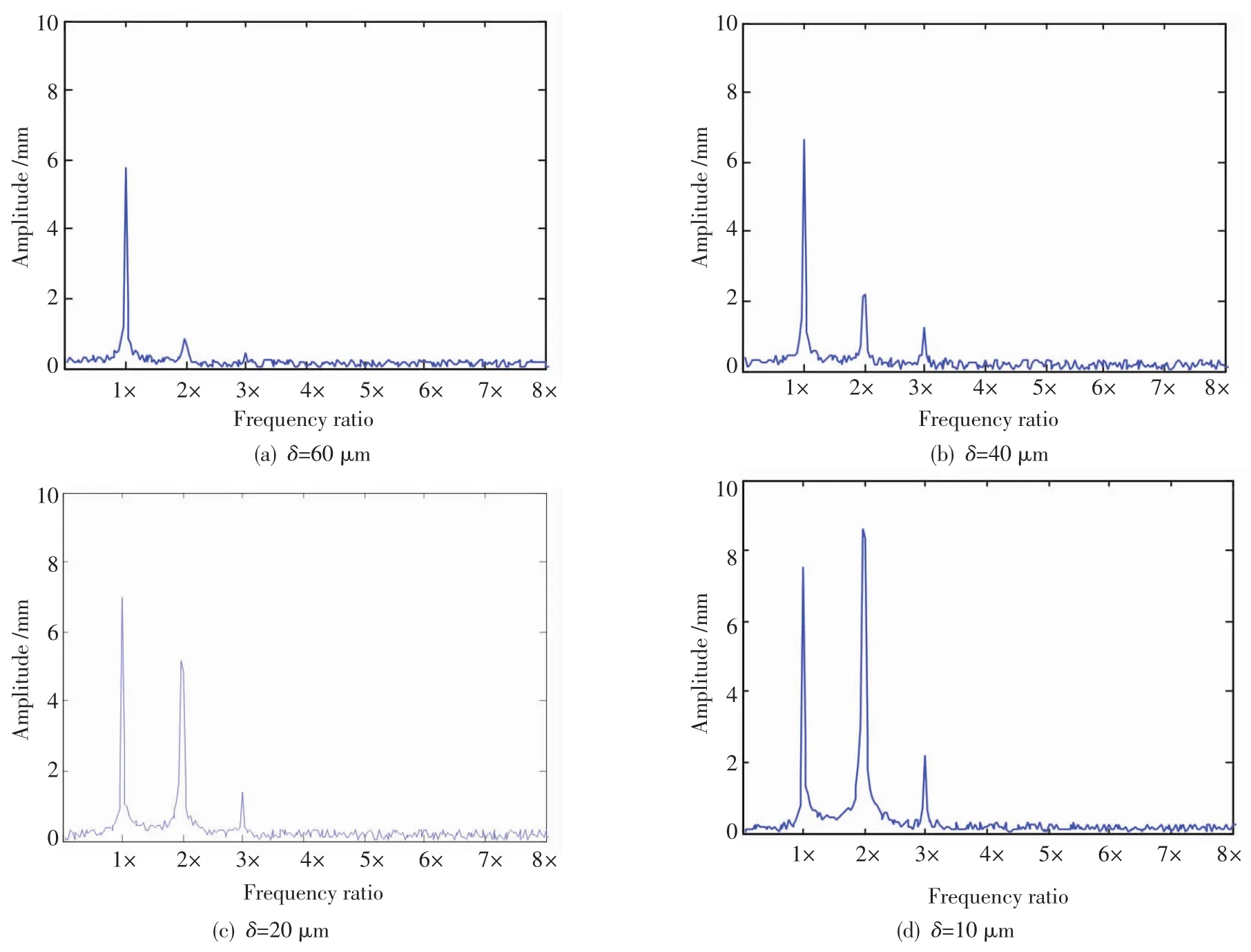
图4 不同转子与定子间隙下转子系统输出频谱图Fig.4 Output spectrum of rotor system with different rotor and stator clearance

表1 不同转子与定子间隙下转子系统NOFRF值Table 1 NOFRF value of rotor system with different rotor and stator clearance
由表1可知,随着转子与定子间隙的减小,系统各阶NOFRF值增大,其中二次谐波二阶核值和二次谐波四阶核值增加的幅度较大,由式(13)可以看出,转子系统的二阶响应Y(j2ωF)主要由和两部分构成,而Y(j2ωF)主要影响转子系统2倍频响应,因此可以通过观察和的变化情况来识别转子系统的碰摩故障。当δ=60 μm时,除外的各阶NOFRF值均远大于转子系统正常运行时的转轴,这说明此时的转子系统是有碰摩故障的,而从频谱图特性中难以判断此时转子系统有无碰摩故障,由此表明系统的NOFRF值对碰摩的变化比较敏感。
转轴的各阶NOFRF值可以反映出转子系统发生碰摩时高阶频率产生及幅值对应关系。通过辨识系统得到的各阶NOFRF值都是单值数字,因此可以对转子系统的碰摩故障进行定量分析,与广义频率响应函数(GFRF)的多维表示进行对比,发现该方法更容易被接受与理解,而且也具有更明确的物理意义。
3 结论
1)当转子系统正常工作时,转子系统的输出频谱图是典型的基频振动,即1倍频成分在频谱图中比较突出,其他倍频成分较为微弱。当转子与定子间隙减小时,2倍频、3倍频成分幅值变的越来越明显。
2)对比有无碰摩时的NOFRF值发现,一旦碰摩出现,NOFRF值发生显著变化,可以利用NOFRF值有效识别碰摩故障是否存在。
3)利用NOFRF值,还可以有效区别碰摩故障的严重程度,尤其是二次谐波二阶核值二次谐波四阶核值对转子碰摩反映特别敏感,并且随着碰摩程度的增加,增加的幅度较大。
[1]Muszynska A.Rotor-to-Stationary element rub-related vibration phenomena in rotating machinery-literature suryey[J].Shock& Vibration Digest,1989,21(3):3-11.
[2]Beatty R F.Differentiating rotor response due to radial rubbing [J].Journal of Vibration&Acoustics,1985,107(2):151-160.
[3]刘雄,屈梁生.转子径向摩擦故障诊断技术的研究[J].西安交通大学学报,1993,27(2):9-14.
[4]夏松波,张嘉钟,徐世昌,等.旋转机械故障诊断技术的现状与展望[J].振动与冲击,1997,16(2):1-5.
[5]何田,刘耀光,陈亚农,等.基于声发射波束形成法的转静子碰摩故障定位[J].航空动力学报,2011,26(10):2207 -2213.
[6]邓艾东,包永强,赵力.基于能量衰减模型的转子碰摩声发射源次梯度投影定位方法[J].机械工程学报,2010,46(9): 66-72.
[7]邓艾东,童航,秦康,等.一种改进的最小方差自适应时延估计算法在碰摩声发射定位中的应用[J].东南大学学报:自然科学版,2012,42(z2):320-325.
[8]成新民,胡峰,邓艾东,等.基于代数网络和混沌参数的碰摩声发射源定位方法研究[J].振动工程学报,2011,24(3): 287-293.
[9]于英利,晋风华,李录平.汽轮发电机组碰摩故障定位方法研究[J].内蒙古电力技术,2005,23(4):35-37.
[10]Wang Q,Chu F.Experimental determination of the rubbing location by means of acoustic emission and wavelet transform [J].Journal of Sound&Vibration,2001,248(1):91-103.
[11] Bachschmid N,Pennacchi P,Vania A.Identification of multiple faults in rotor systems[J].Journal of Sound& Vibration,2002,254(2):327-366.
[12]李录平,邹新元,晋风华.基于矢量分析的转子碰磨故障轴向定位方法[J].热能动力工程,2006,21(1):27-30.
[13]Lang Z Q,Billings S A,Yue R,et al.Output frequency response function of nonlinear volterra systems[J].Automatica,2007,43(5):805-816.
[14]Lang Z Q,Billings S A.Energy transfer properties of nonlinear systems in the frequency domain[J].Journal of Sound and Vibration,2005,78(5),354-362.
[15]Lang Z Q,Peng Z K.A novel approach for nonlinearity detection in vibrating systems[J].Journal of Sound and Vibration,2008,314(3-5):603-615.
[16]Lang Z Q,Billings S A,Tomlinson G R,et al.Analytical description of the effects of system nonlinearities on output frequency responses:A case study[J].Journal of Sound and Vibration,2006,295(3-5):584-601.
[17]Peng Z K,Lang Z Q.The nonlinear output frequency response functions of one-dimensional chain type structures[J].Journal of Applied Mechanics,2010,77(1):11-27.
[18]Peng Z K,Lang Z Q,Billings S A,et al.Analysis of locally nonlinear MDOF systems using nonlinear output frequency response functions[J].Journal of Vibration and Acoustics,2009,131(5):51-63.
[19]Peng Z K,Lang Z Q,Billings S A,et al.Crack detection using nonlinear output frequency response functions[J].Journal of Sound and Vibration,2007,301(3-5):777-788.
[20]Peng Z K,Lang Z Q,Billings S A.Analysis of bilinear oscillators under harmonic loading using nonlinear output frequency response functions[J].International Journal of Mechanical Sciences,2007,49(11):1213-1225.
[21]员险锋,李志农,林言丽.基于非线性输出频率响应函数的裂纹故障诊断方法研究[J].机械强度,2013,35(2):133 -137.
[22]员险锋.基于非线性输出频率响应函数的转子裂纹故障诊断方法研究[D].郑州:郑州大学,2011:16-22.
[23]韩清凯,杨英,郎志强,等.基于非线性输出频率响应函数的转子系统碰摩故障的定位方法研究[J].科技导报,2009,27(2):29-32.
Fault Diagnosis Method of Rub-impact in Rotor System Based on Nonlinear Output Frequency Response Function
LI Zhi-nong,DIAO Hai-yang,XIAO Yao-xian
(School of Aeronautical Manufacturing Engineering,Nanchang Hangkong University,Nanchang 330063,China)
Nonlinear output frequency response function is introduced to fault diagnosis of rotor system with rub-impact.NOFRF values in the rotor and the stator rotor system with different gap are compared,and the experimental verification is carried out. The experiment results show that the NOFRF value is very sensitive to different rubbing gap.Therefore,the sensitivity of NOFRF value to the rubbing fault can be used to effectively distinguish the rub impact fault in the rotor system,and identify the severity of the rubbing fault in the rotor system.
nonlinear output frequency response function;rub-impact;fault diagnosis;rotor system
TH133
A
10.3969/j.issn.1673-6214.2016.02.001
1673-6214(2016)02-0067-05
2016年2月2日
2016年3月30日
国家自然科学基金(51265039,51075372,50775208);机械传动国家重点实验室开放基金(SKLMT-KFKT-201514)
李志农(1966年-),男,博士,教授,主要从事智能检测与信号处理等方面的研究。
