MX-3开放式数控系统实验平台开发与应用
2016-08-29徐学武梅雪松
李 晶, 徐学武, 李 浩, 梅雪松
(西安交通大学 机械工程学院, 陕西 西安 710049)
MX-3开放式数控系统实验平台开发与应用
李晶, 徐学武, 李浩, 梅雪松
(西安交通大学 机械工程学院, 陕西 西安710049)
MX-3是西安交通大学开发的基于GUC运动控制器的开放式机床数控系统,具有三轴联动铣削功能,是能够实现由交流伺服电机驱动的半闭环控制系统。该系统硬件由数控装置和伺服系统组成,GUC-400-ESV运动控制器为数控装置的核心部件,以Visual C++为工具进行控制软件开发,操作系统采用Windows XP系统。在该数控系统基础上搭建了MX-3开放式数控系统实验平台,并应用于数控技术实践教学中,既丰富了实验教学内容,又提高了实验教学质量。
开放式数控系统; 运动控制器; 数控技术; 实验教学
传统数控系统以其成熟的技术、完善的功能、较高的可靠性而广泛应用于工业生产的很多领域[1-3]。然而,传统数控系统专用性强、通用性差,设备制造商采用的数控系统没有共同性和标准化的接口,无法形成持久、高可靠性的软件扩展能力和满足用户进行二次开发的需求,也限制了数控技术的进一步发展和应用。在这样的环境与背景下,开放式数控系统(open numerical control system)应运而生。
开放式数控系统就是指所开发的数控系统可以运行于各种通用硬件和操作系统,能够提供面向功能的动态重构与二次开发方案,并且能够提供统一标准的应用程序用户界面(API)[4-5]。开放式数控系统的成功开发使得企业生产面向任务和订单的生产组织模式成为可能,使底层生产控制系统的集成更为简便和有效[6]。
西安交通大学数控技术课程在国家精品课程建设的大力支持下,凭借在数控系统开发、伺服优化、系统性能测试等方面的技术优势,由智能诊断及控制装备研究所和机械基础实验教学国家级示范中心联合开发了基于运动控制器的开放式数控系统,并搭建了4台MX-3开放式数控系统实验平台。MX-3开放式数控系统是一款基于GUC运动控制器开发的机床数控系统,具有三轴联动铣削功能,能够实现由交流伺服电机驱动的半闭环控制系统。
1 开放式数控系统硬件系统设计
MX-3开放式数控系统由数控装置和伺服系统两部分组成。
数控装置是控制机床运动的中枢系统,它的基本功能是接收来自程序介质的信息,按照规定的控制算法进行插补运算,把控制信息转换为伺服系统能够接收的指令信号,并将结果由输出装置送到各坐标控制的伺服系统。
伺服系统由伺服驱动器和伺服电机组成,其基本功能是接收数控装置发出的指令信号,控制机床执行部件的进给速度、方向和进给位移量等,以完成零件的自动加工[7-8]。图1为MX-3开放式数控系统硬件总体结构图。
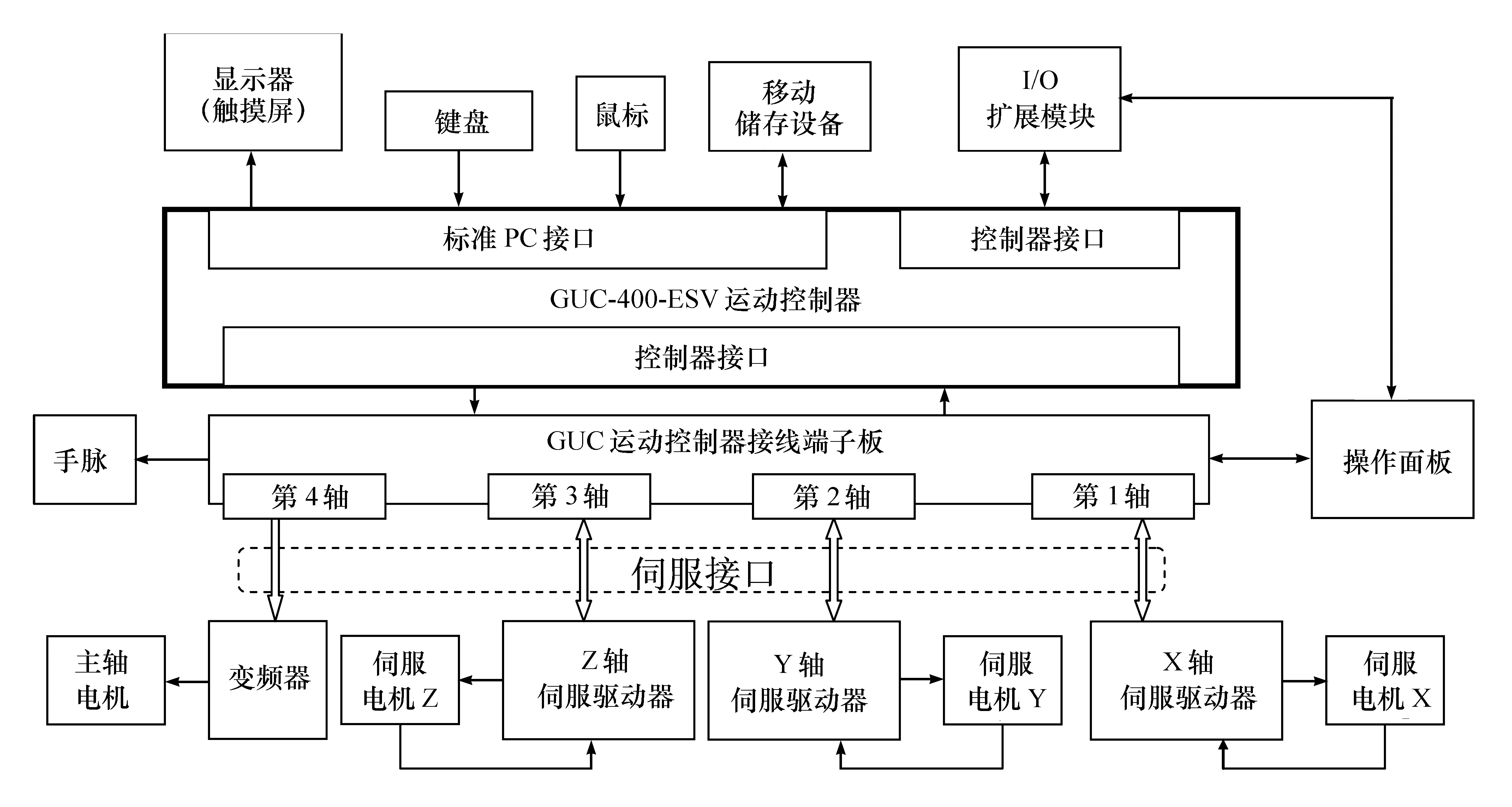
图1 MX-3开放式数控系统硬件平台总体结构
MX-3开放式数控系统数控装置以GUC-400-ESV运动控制器为核心部件进行构建,还包括显示器(触摸屏)、键盘、鼠标、控制面板、手脉等外设。GUC运动控制器是将PC技术与运动控制技术相结合的一体化运动控制器,它以Intel标准X86架构的CPU和芯片组作为系统处理器,采用DSP和FPGA作为运动控制协处理器。
GUC运动控制器在硬件上提供两种接口:一种是PC机常见接口,如USB、PS2、VGA、LAN等;另一种为运动控制器专用接口。在软件方面,GUC运动控制器提供由高级语言编写的函数库,并以动态链接库的形式提供给用户使用。用户可以使用支持动态链接库的软件开发工具来开发应用程序,以实现复杂的控制功能。用户可以将这些特定功能的控制函数与开发控制系统所需要的界面显示、数据处理、用户接口等程序模块集成在一起,构建符合特定应用要求的控制系统。
MX-3开放式数控系统的伺服系统由主轴系统和直线进给轴系统组成,其中主轴系统采用变频器带三相异步电机的控制方案,连接到GUC运动控制器的第4轴,直线进给轴系统采用交流伺服电机的半闭环控制,连接到GUC运动控制器的1轴—3轴。
根据西安交通大学机械基础实验教学示范中心现有的4台ZJK7532数控钻铣床的机械特性参数和硬件平台总体方案,对数控装置与伺服系统的相关硬件设备进行选型与设计,其结果如表1所示。
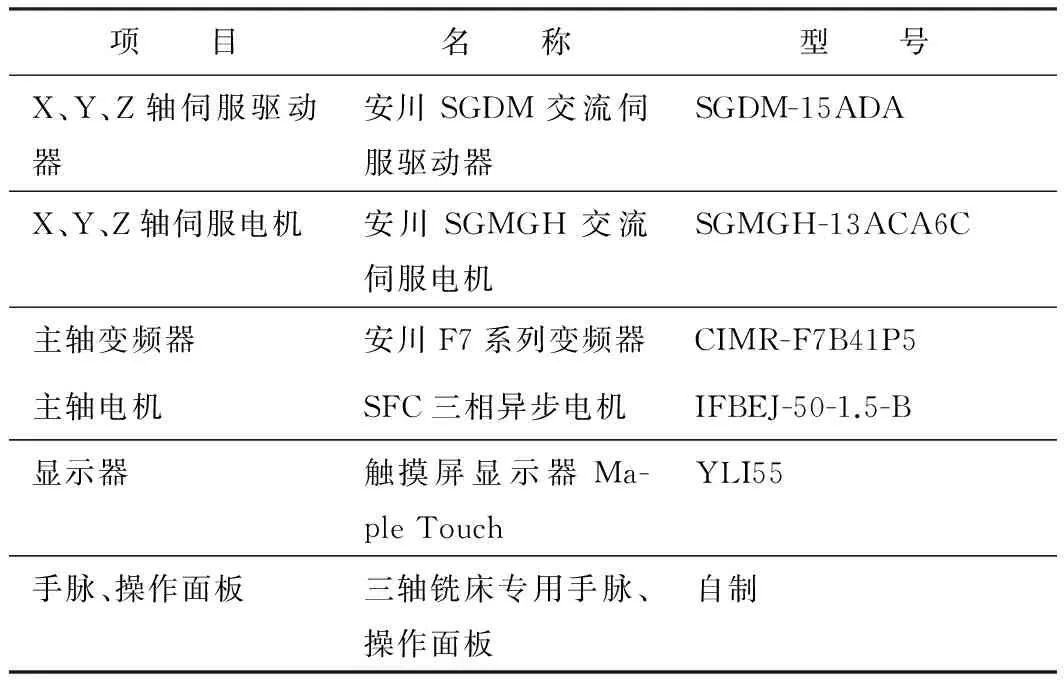
表1 MX-3开放式数控系统硬件设备表
2 软件系统开发
MX-3开放式数控系统以Visual C++6.0为工具进行控制软件开发,用Windows XP来构建操作系统。MX-3开放式数控系统的基本功能主要分为系统管理功能和系统控制功能,设计的NC功能模块也相应地分为系统管理类功能模块和系统控制类功能模块,如图2所示。系统控制功能模块是软件的核心,它负责控制机床的自动加工过程,包括NC程序预处理、插补运算、伺服控制、开关量I/O控制等;系统管理功能模块是基础,它负责协调整个系统的工作,包括NC程序管理、参数输入、系统显示、故障诊断等。
MX-3开放式数控系统人机控制软件的工作流程如图3所示。系统启动后,首先进行系统参数设置及系统初始化过程。当系统正常运行后,系统控制软件的工作内容主要有两方面,即功能循环(见图3左侧)和I/O循环(见图3右侧)。“功能循环”由操作者的指令触发,并根据所执行控制功能的具体条件而停止,主要完成开放式数控系统的各项控制功能,直接实现数控机床的加工任务。“I/O循环”实现对运动控制器数字量输入/输出端口的定时查询,该部分包含了传统数控系统PMC的功能,实现系统与外部设备的交互以及通过I/O实现的开放式数控系统的操作功能。
3 MX-3开放式数控系统操作界面
MX-3开放式数控系统启动之后将进入系统初始化界面。用户可以根据界面上的提示进行5类操作:参数管理、程序运行、仿真与显示、系统诊断、扩展功能。系统功能的操作主要通过选单命令区的功能切换来完成。由于每个功能包括不同的操作,故选单采用层次化结构,即在主选单下选择一个选单项后,软件会显示该功能下的全部子选单项,用户可以根据该子选单的内容选择所需要的操作。图4、图5分别为程序仿真界面和参数管理界面。
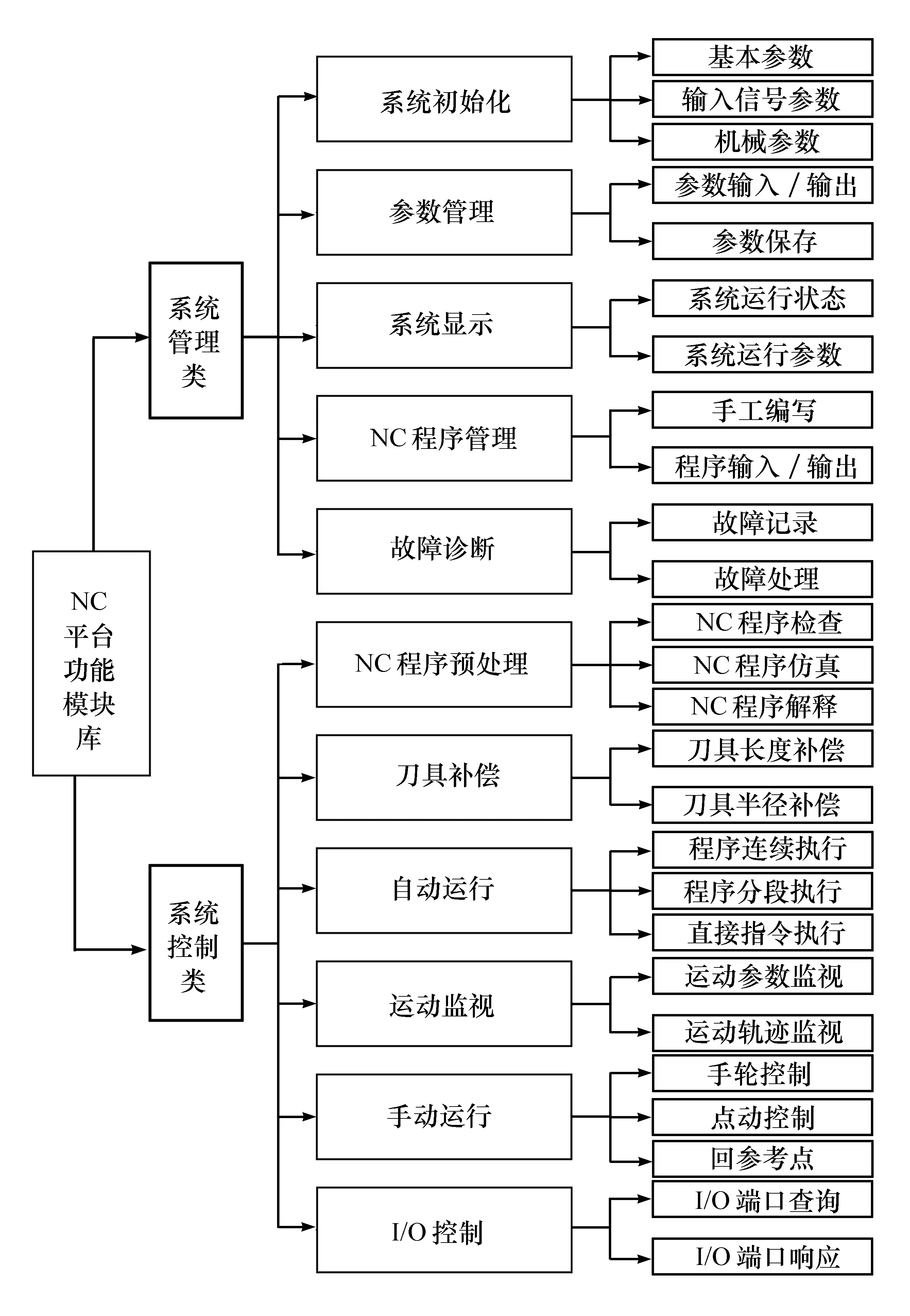
图2 NC功能平台功能模块库的组织结构
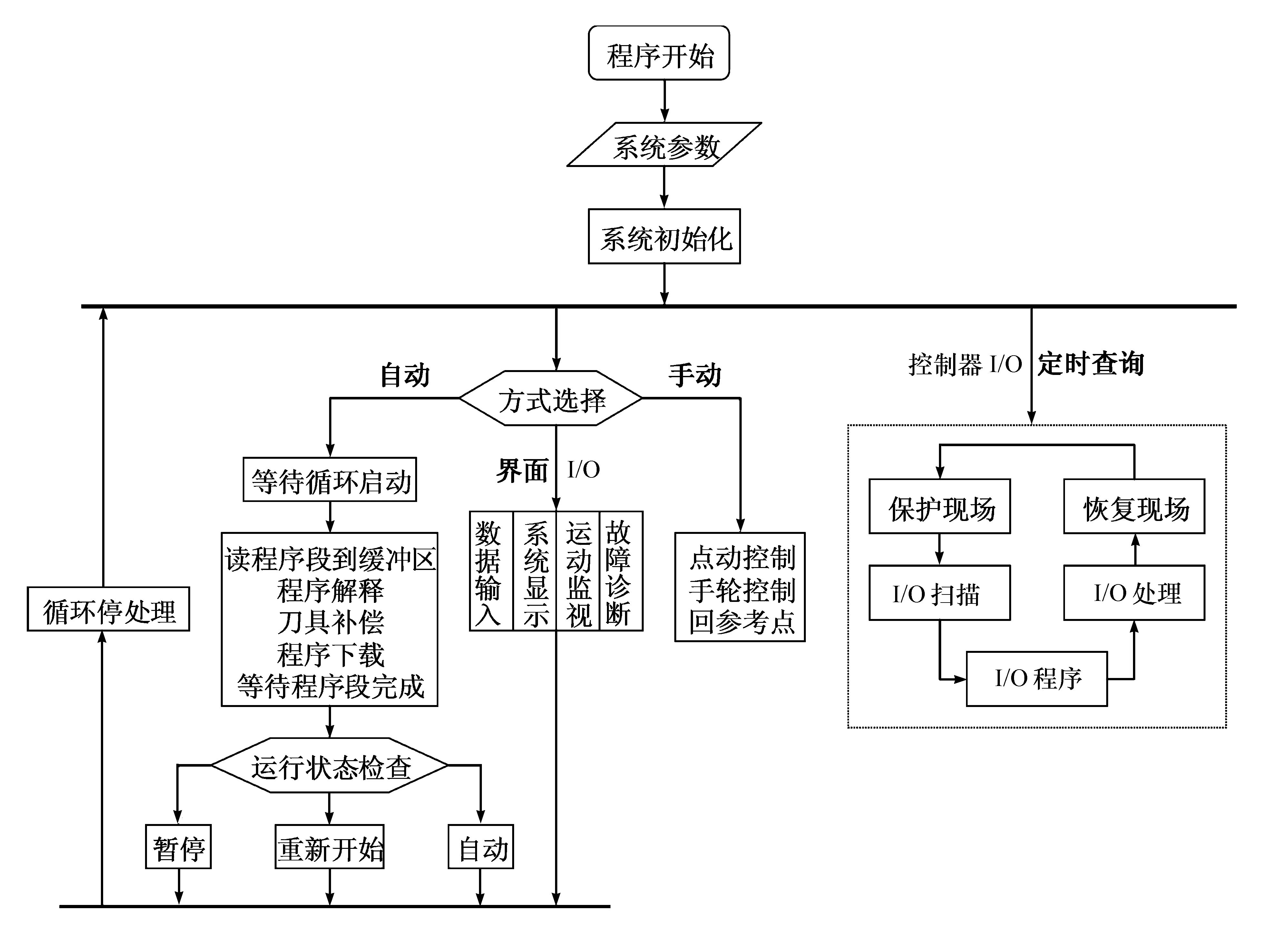
图3 控制软件的工作流程
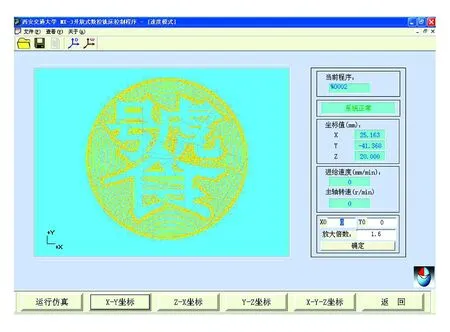
图4 系统程序仿真界面

图5 系统参数管理界面
4 实验台应用
近年来,西安交通大学在数控技术课程的实践教学中,不断融合教学团队在高速、高精度数控技术领域的最新研究成果,竭力改善实验条件和实验手段,特别是通过改造、自制设备改善了实验环境。MX-3开放式数控系统实验平台是自制实验设备的典型代表。
目前,在MX-3开放式数控系统实验台基础上,成功开发出了数控技术课内实验、CDIO项目实践等实验项目,既丰富了数控技术课程的实验教学内容,又有利于构建合理的实验教学体系。
(1) 本科教学课内实验包括基于运动控制器的开放式数控系统构建及分析、主轴变频调速及伺服电机参数优化[9],每年面向机械工程及自动化专业、车辆工程专业的学生开设1 200人时数的课内实验。
(2) 开展CDIO项目实践。CDIO教育模式秉承以产品、过程和系统的构思(conceive)、设计(design)、实施(implement)、运行(operate)全生命周期为背景的教育理念,让学生以主动的、实践的、课程之间具有有机联系的方式学习和获得工程能力[10]。在该实验台基础上开发出了多项CDIO实践项目。利用开放式数控系统硬件系统的开放性,开展数控系统硬件平台搭建实验;利用开放式数控系统软件系统的开放性,使学生利用VC++程序开发数控系统控制功能模块实验。目前开出的CDIO项目实践包括数控机床操作面板的设计与制作、开放式数控系统研究与开发等项目。
在该实验台基础上,还开展了数控机床动态特性测试与研究、数控机床误差补偿研究、伺服参数优化研究等科研工作。同时,该实验台也为本科生毕业设计、本科生科研训练和实践创新基金项目的开展提供了便利条件。通过对MX-3开放式数控系统实验台的系统功能和性能的测试,证明该实验台可满足经济型数控铣床的控制精度要求。
5 结语
MX-3开放式数控系统人机界面丰富且操作方便,系统硬件工作安全稳定,系统软件功能丰富,软硬件系统具有很好的开放性。该系统的开发与应用是将科研成果成功转化到实践教学中的成功范例,为学生提供了宽松、有利于创新的良好实践环境,切实提高了学生的专业知识综合运用能力和科研创新能力[11-12]。 MX-3开放式数控系统的研究与开发顺应了数控技术的发展潮流,同时能满足当今市场对产品制造灵活性、多样性的要求,具有创新应用和技术推广的意义。
References)
[1] 杜少华.开放式数控系统可重构技术研究[D].沈阳:中国科学研究院沈阳计算技术研究所,2015.
[2] 程国标.开放式数控系统研究[D].上海:复旦大学,2008.
[3] 赵春红,秦现生,唐虹.基于PC的开放式数控系统研究[J].机械科学与技术,2005,24(9):1108-1113.
[4] 周祖德,魏仁选,陈幼平.开放式控制系统的现状、趋势及对策[J].小微型计算机系统,1999,20(2):81-87.
[5] 董正凯.基于运动控制器的开放式数控平台的研究[D].哈尔滨:哈尔滨工业大学,2010.
[6] 张航伟.基于PC的开放式数控系统研究开发[D].西安:陕西科技大学,2006.
[7] 梅雪松,许睦旬,徐学武,等.机床数控技术[M].北京:高等教育出版社,2013.
[8] 任玉田,包杰,喻逸君,等.新编机床数控技术[M].北京:北京理工大学出版社,2009.
[9] 徐学武,姜歌东,孙挪刚.数控技术实验原理及实践指南[M].北京:机械工业出版社,2013.
[10] Crawley E F, Malmqvist J, Östlund S,等.重新认识工程教育:国际CDIO培养模式与方法[M].故佩华,沈民奋,陆小华,译.北京:高等教育出版社,2009.
[11] 扶慧娟,辛勇.推行“卓越工程师计划”培养实践型工程人才[J].实验技术与管理,2011,28(11):155-158.
[12] 刘方,刁虎欣,张金红,等.开设研究创新型实验的探索和实践[J].中国大学教学,2007(5):82-83.
Development and application of experimental platform for MX-3 open numerical control system
Li Jing, Xu Xuewu, Li Hao, Mei Xuesong
(School of Mechanical Engineering, Xi’an Jiaotong University,Xi’an 710049,China)
The MX-3 open numerical control system is based on the motion controller named GUC produced by Googol technology Ltd. Co. This system is a semi closed loop control system which is driven by AC servo motor and is designed for milling and owns three feed shafts. The hardware system consists of the servo system and the numerical control device whose core component is the GUC-400-ESV motion controller. The software system is developed with Visual C++ as the tool. The operating system uses the XP Windows system. The experimental platform for MX-3 open numerical control system based on open numerical control system is applied to the practical teaching of numerical control technology and not only enriches the experimental content, but also improves the quality of experimental teaching.
open numerical control system; motion controller; numerical control technology; experimental teaching
DOI:10.16791/j.cnki.sjg.2016.01.036
2015- 06- 09
陕西省数控一代机械产品创新应用示范工程项目(2013KTZB01-01-01)
李晶(1975—),女,辽宁营口,硕士,助理研究员,研究方向为高精密数控加工技术.
E-mail:jingli927@xjtu.edu.cn
TG659;TP273
A
1002-4956(2016)1- 0143- 04