四立柱道路模拟试验迭代控制点选择方法研究
2016-08-02张爱龙伊斯武喻镇涛滕今仙国家汽车质量监督检验中心襄阳襄阳441004
张爱龙,伊斯武,喻镇涛,滕今仙(国家汽车质量监督检验中心(襄阳),襄阳,441004)
四立柱道路模拟试验迭代控制点选择方法研究
张爱龙,伊斯武,喻镇涛,滕今仙
(国家汽车质量监督检验中心(襄阳),襄阳,441004)
摘 要:四立柱道路模拟试验通过迭代过程完成整车垂向运行状态模拟,选择的迭代控制点越多,模拟精度越高,但采集道路信号的工作量越大,迭代过程也越复杂。为了兼顾模拟精度、试验工作量及迭代难度,本文对迭代控制点的选择方法展开了研究,首先对四立柱常用迭代控制点之间的关系进行了分析及验证;进一步提出以轮心垂直加速度和减振弹簧应变作迭代控制点为一种较优的选择方法;最后进行了相应的四立柱迭代试验验证。
关键词:四立柱道路模拟;迭代控制点;信号分析;迭代试验

张爱龙毕业于南开大学,控制理论与控制工程专业,硕士学位,主要从事汽车结构疲劳试验技术研究,曾获襄阳市科技进步三等奖一次。
1 引言
在乘用车开发过程中,各开发阶段样车都需要开展整车耐久性试验。整车耐久性试验一般通过试验场道路试验来验证,整个测试周期长,人力投入高。为了减少对整车道路试验的依靠,提高产品试验场整车道路试验的通过率,在开发试验过程中,需增加整车道路模拟耐久性试验。整车道路模拟耐久性试验具有非常接近整车道路试验工况的特点,同时试验周期短,重复好,能够提前发现整车耐久性的问题并验证解决效果,缩短开发周期[1-2]。
四立柱道路模拟试验通过迭代过程完成整车垂向运行状态模拟[3-5],即利用试验台架在整车的四个轮胎接地点位置施加竖向位移激励整车,并反复修正位移激励量,直到整车的振动状态逼近在试验道路上行驶的振动状态。四立柱试验通常选择轮心垂直加速度、悬架正上方车身垂直加速度、减振器位移和减振弹簧应变作为整车振动状态考核指标。台架模拟试验前在整车的相应位置布置加速度计、位移传感器及应变片,并到实际道路试验工况上面采集相应的信号;进一步在四立柱上通过迭代直到收集的台架响应信号与道路上采集的信号一致[6]。
台架响应与道路采集信号的一致性直接决定了道路模拟试验的准确性。通常迭代选择的控制信号点越多,模拟精度越高,但是前期采集信号的工作量越大,迭代过程也越复杂。为了兼顾模拟精度及试验工作量和迭代难度,本文对迭代控制点的选择方法展开了研究,首先对四立柱常用迭代控制点之间的关系进行了分析及验证;进一步提出以轮心垂直加速度和弹簧应变作迭代控制点为一种较优的选择方法;最后进行了相应的四立柱迭代试验验证。
2 四立柱常用迭代控制点关系分析
整车四立柱前悬常用迭代控制点的布置如图1所示,定义轮心垂直加速度、悬架正上方车身垂直加速度、弹簧应变、减振器位移量分别为adown、aup、ɛ及S。
根据胡可定律,弹簧应变与减振器位移变化量成比例,即

其中K为常系数。而

vdown、vup分别为轮心和悬架上车身垂直速度。将式(3)

代入式(2)可得式(4)

结合式(4)与式(2)可得式(5)


图1 前悬迭代控制点分布
3 迭代控制点关系分析验证
利用道路采集的数据对分析得出的弹簧应变与减振器位移变化量之间的比例关系(式(1))及弹簧应变与轮心和悬架上车身垂直加速度的关系(式(5))进行验证。为了避免验证数据重复使用,提高验证的准确性,式(1)与式(5)的验证使用不同车型所采集的数据。
风神某越野车型在比利时工况采集的右前减振弹簧应变与减振器位移变化量信号历程的局部段如图2所示,由50至55 s的放大视图可见应变与位移曲线变化趋势相似。选取三个时间点位置求取应变位移的比值,取平均得到比例系数K为40.1,将整段位移历程乘以该系数,得到的信号历程与应变信号放在同一视图,局部如图3所示。按比例转换后的位移曲线与应变曲线吻合度较高,验证了弹簧应变与减振器位移的比例关系。

图2 某越野车型右前弹簧应变及减振位移历程

图3 通过比例系数转换后的位移信号及应变信号局部视图
对风神某轿车车型在比利时路工况采集的右前轮心、悬上车身垂直加速度求差如图4所示,按照式(4)对差值进行二重积分的结果如图5、图6所示:

图4 某轿车型右前轮心、悬上车身垂直加速度差

图5 对差值关于时间求积分得到速度差

图6 对差值关于时间求二重积分得到位移差
通过图6中100至110 s的局部放大图可见加速度差的二重积分与弹簧的应变曲线相似。选取三个时间点位置求取应变、二重积分的比值,取平均得到比例系数K为20.6,将整段二重积分历程乘以该系数,得到的信号历程与应变信号放在同一视图,局部如图7所示。按比例转换后的二重积分曲线与应变曲线吻合度较高,验证了式(5)应变与轮心和悬架上车身垂直加速度的关系。

图7 通过比例系数转换后的二重积分及应变信号局部视图
4 四立柱迭代控制点选择
式(1)表明弹簧应变与减振位移有较好的比例关系,两种信号只需选择一种。目前用于测量整车减振器位移的传感器主要有拉线式和拉杆式,均需要在悬架上下端各定一个点来固定位移传感器的两端,受空间的约束,安装使用复杂,一种拉线式位移传感器的固定方式如图8所示。而弹簧应变的测量较简单,只需要在弹簧上面布置应变花,如图9所示。因而采用减振弹簧应变作为一种迭代控制点。
式(5)表明弹簧应变与轮心和悬架上车身的垂直加速度有固定的关系,由于轮心的加速度幅值较大,灵敏度高,采用轮心垂直加速度作为另外一种迭代控制点。
兼顾模拟精度和工作复杂度,以轮心垂直加速度和弹簧应变作为四立柱迭代控制点为一种较优的选择方法。

图8 一种拉线式位移传感器的双约束点固定方式

图9 弹簧应变花布置
5 四立柱迭代试验验证
按照选择的迭代控制点,在风神某轿车车型进行四立柱道路模拟试验。以四个轮心垂直加速度和四个减振弹簧应变作为信号点,比利时路工况的迭代结果如图10所示,台架响应信号与道路信号时间历程的均方根(RMS)正则化均小于10%,达到迭代要求。

图10 某轿车车型四立柱迭代结果
利用迭代获取的驱动信号激励台架,得到悬架上车身的垂直加速度与道路上实际采集的信号对比如图11所示。悬架上车身的垂直加速度没有进行迭代,仅为监测点,但最终台架响应信号与道路采集信号能够匹配,说明轮心垂直加速度和弹簧应变能够达到约束悬上车身垂直加速度的作用,进一步表明以轮心垂直加速度和弹簧应变作为四立柱迭代控制点能够兼顾模拟精度和工作复杂度,为一种较优的选择方法。
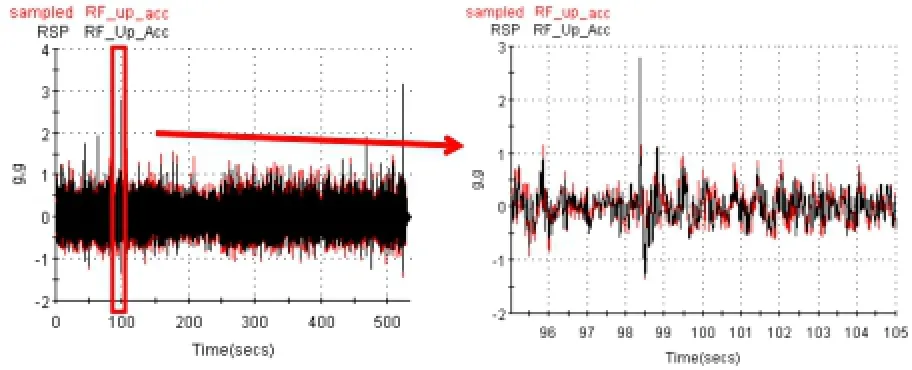
图11 台架响应和实际采集悬架上车身的垂直加速度对比
6 结论
本文对四立柱道路模拟试验常用迭代信号的关系进行了分析,利用实际道路采集信号验证了两个比例关系:(1)弹簧应变与减振器位移变化量之间的比例关系;(2)弹簧应变与轮心和悬架上车身垂直加速度差值关于时间的二重积分的比例关系。在此基础上,兼顾四立柱道路模拟精度和工作复杂度,本文提出以轮心垂直加速度和弹簧应变作为迭代控制点为一种较优的选择方法,并通过具体的迭代试验进行了验证。
参考文献:
[1] Ledesma, R., Jenaway, L., Wang, Y., and Shih, S ., Development of Accelerated Durability Tests for Commercial Vehicle Suspension Components, SAE Technical Paper 2005-01-3565.
[2] 耿永生. 整车道路模拟试验控制技术[J].自动化应用,2011(3):28-31.
[3] 钱立军,吴道俊,杨年炯等. 基于室内道路模拟技术的整车加速耐久性试验的研究. 汽车工程,2011,33(2):91-96.
[4] 陈忠良,崔红伟,骆红云等. 室内整车可靠性道路模拟试验方法. 北京汽车,2010,2(2):10-13.
[5] 汪斌,过学迅,李孟良等. 基于迭代学习控制的道路模拟算法. 汽车工程,2010, 32(8):686-689.
[6] 石锋,王红钢,刘再生等. 路谱台架试验研究.振动与冲击, 2012,31(19):10-14.
中图分类号:U467.1
文献标识码:A
文章编号:1005-2550(2016)02-0088-05
doi:10.3969/j.issn.1005-2550.2016.02.015
收稿日期:2015-12-18
Research on Iteration Signals Selecting of Four-channel Road Simulation Test
ZHANG Ai-long, YI Si-wu, YU Zhen-tao, TENG Jin-xian
( National Automobile Quality Supervision and Test center (Xiangyang), Xiangyang 441004, China )
Abstract:Iteration process is used by four-channel road simulation test to match the vertical vibration status of vehicle. The more iteration control signals are used, the higher simulation accuracy will be, however that will lead to a more difficult iteration at the same time. Taking account of simulation accuracy, workload and iteration difficulty, how to select iteration control signals is researched by the paper. Firstly, relationship between generally used iteration control signals is analyzed and verificated; Then vertical acceleration at wheel centre and strain on damper spring are recommended as preferable iteration control signals. Finally, an actual four-channel road simulation test is used to verify the recommendation.
Key Words:four-channel road simulation; iteration control signals; signal analysis; iteration test
