基于驾驶意图识别的PHEV控制策略研究*
2016-08-02尹安东国兴合肥工业大学机械与汽车工程学院合肥230009汽车技术与装备国家地方联合工程研究中心合肥230009
尹安东,国兴(.合肥工业大学 机械与汽车工程学院,合肥,230009,2.汽车技术与装备国家地方联合工程研究中心,合肥,230009)
基于驾驶意图识别的PHEV控制策略研究*
尹安东1,2,国兴1
(1.合肥工业大学 机械与汽车工程学院,合肥,230009,2.汽车技术与装备国家地方联合工程研究中心,合肥,230009)
摘 要:以插电式四驱混合动力汽车为研究对象,运用模糊控制理论建立了驾驶意图识别模块,并设计了一种基于驾驶意图识别的整车控制策略。采用Matlab/Simulink平台建立了整车仿真模型,并基于实例车型在NEDC工况下对插电式四驱混合动力系统进行仿真。仿真结果表明:所建立的模糊控制策略能够有效识别驾驶员的驾驶意图,并能够进行相应工作模式的切换和转矩的合理分配,从而验证了整车控制策略的有效性,为研究插电式四驱混合动力控制策略提供了一种新思路。
关键词:插电式混合动力汽车;驾驶意图识别;模糊控制;控制策略

尹安东合肥工业大学机械与汽车工程学院博士、副教授,硕士生导师。研究方向为电动汽车整车及控制系统设计、信号检测和故障诊断,发表学术论文50余篇。
1 引 言
插电式混合动力汽车兼具纯电动汽车和传统汽车的优点,既有纯电动汽车节能环保的特点,续驶里程也能得到保障[1],其中整车控制策略是混合动力汽车的核心技术之一[2],因此多能源控制策略是插电式混合动力汽车研发的热点[3]。目前插电式混合动力汽车控制策略大致可以分为:基于规则的控制策略、瞬时优化控制策略和全局优化控制策略等[4]-[6]。这些能量管理策略没有综合考虑不同行驶里程、电池初始SOC、循环工况及驾驶员意图对能耗经济性的影响,由此使插电式混合动力汽车的能耗经济性优势难以充分发挥。
文中在分析插电式四驱混合动力汽车的动力驱动系统结构特点的基础上,设计了基于驾驶员意图识别的整车控制策略,该策略分为三个步骤:1)驾驶员驱动意图识别;2)工作模式切换;3)转矩分配。并在MATLAB/SIMULINK平台上建立了插电式四驱混合动力系统的前向仿真模型,在NEDC工况下进行基于驾驶意图识别整车控制策略的仿真分析。
2 PHEV系统布置结构与工作模式

图1 为插电式四驱混合动力的系统布置结构。
2.1 PHEV系统基本结构后桥由后轴电机驱动,前桥由发动机与ISG电机驱动,变速器选用CVT。
2.2 插电四驱混合动力汽车工作模式
1)前轴驱动包括发动机单独驱动、ISG电机辅助发动机驱动与发动机驱动同时带动ISG电机发电。
2)后轴驱动包括后驱电机单独驱动与串联驱动(后驱电机驱动,发动机带动ISG电机发电);
3)四轮同时驱动为发动机与后驱电机同时为混合动力汽车提供动力。
3 基于模糊控制的驾驶意图识别
3.1 驾驶意图
驾驶意图主要分为驱动意图和制动意图。本文仅对驱动意图进行研究。根据加速的紧急程度划分,加速意图包括平缓加速、一般加速和紧急加速。平稳驾驶意图根据车速的不同可以分为高速平稳驾驶和低速平稳驾驶[8]。
驾驶员通过踩踏加速踏板或者制动踏板来反映自身的驾驶意图,此外,驾驶踏板的开度还可以反映出汽车的负荷和汽车的加速的紧急情况[9]。由于驾驶意图随着车辆的运行状态以及循环工况实时变化,难以用精确地数学模型来描述,是一个典型的经验模型,而模糊理论在处理经验模型上有着明显的优势,因此文中采用模糊控制理论来识别驾驶意图[10]。
理论教学是专业技能培养的第一步,是实验教学和实践教学的基石。实验教学作为培养学生自主创新能力的重要环节,不仅有助于培养学生独立探索的能力、激发其科学研究的兴趣,帮助学生掌握扎实的理论知识,还能提高学生的动手操作能力和实验技能,为日后生产实际中理论知识的灵活应用奠定了坚实的基础[6]。实践教学作为教学过程中理论知识和实验经验综合运用的关键教学环节,是巩固理论知识的重要途径,对着重培养学生分析及解决问题的能力具有重要的推动意义。
3.2 驾驶意图识别模糊控制器的设计
加速意图识别模糊控制器采用加速踏板开度与加速踏板变化率构建模糊规则。输入量a代表加速踏板开度,da/dt代表加速踏板变化率,它们的模糊子集设为{S,M,B}。输出量b代表驾驶意图,模糊子集设置为{平缓,一般,紧急}。其中,a中的S代表加速踏板开度小,M代表加速踏板开度中等,B代表加速踏板开度大。da/dt中的S代表加速踏板开度变化率小,M代表加速踏板开度变化率中等,B代表加速踏板开度变化率大。
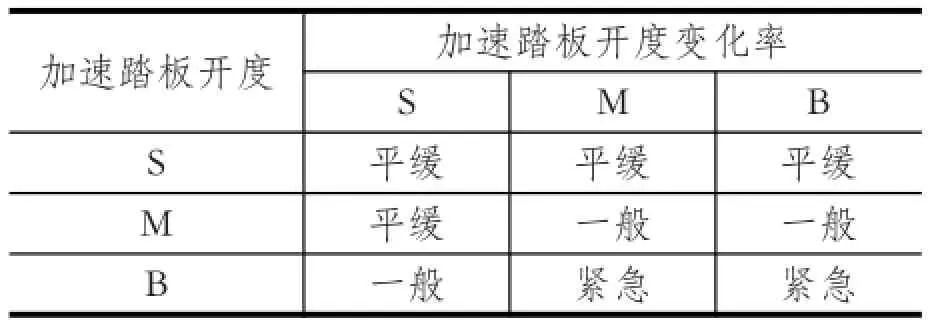
表1 模糊控制规则
根据传统驾驶员模型仿真所得到的参考值以及工程经验,输入量a的论域可以定为[0,1], 的论域可以定为[0,8],驾驶意图的论域[0,8]。各个输入与输出变量对应的隶属函数如图2所示。当模糊控制器输出量为一个在1附近的数时,加速意图为平缓加速;输出量为一个在4附近的数时,加速意图为一般加速;输出量为一个在7附近的数时,加速意图为紧急加速。表1为根据实际驾驶经验制定的模糊控制规则。
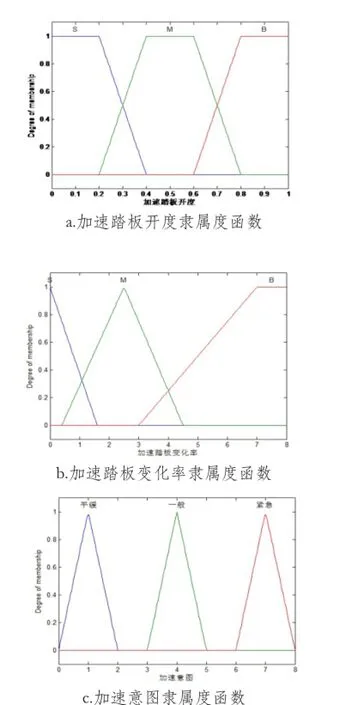
图2 模糊控制隶属度函数
平稳行驶意图识别以整车加速度以及车速作为模糊输入量,其隶属度函数以及模糊控制规则的制定与加速意图识别类似,在此不做赘述。
4 基于驾驶意图识别的整车控制策略设计
4.1 驱动模式控制策略
由于传统汽车只存在发动机一个动力源,使得发动机的工作点不易受到控制,因此发动机的效率比较低,燃油经济性不好。而混合动力汽车可以利用电机辅助发动机,使发动机尽可能多的工作在高效率区域[11]。因此,本文控制策略的目标是尽量以电机为主要动力源,并且在发动机工作时使发动机输出最优转矩[12]。
在驱动模式控制策略中,工作模式切换条件的确定是最主要的研究问题[13],本文采用SOC区域控制策略,根据驾驶意图的识别结果,以车速、SOC值等变量为逻辑门限值,制定整车控制策略。
1)当电池的SOC处于高状态时,首先判断车速。若车速低于35 km/h时,考虑到发动机在低速下的效率比较低,而此时电量充足,因此采用后驱电机驱动。若车速高于35 km/h时,判断是否为平稳行驶状态。若为低速平稳行驶状态,此时需求扭矩较小,转速较低,而电量比较充足,采用后驱电机驱动;若为中高速平稳行驶,采用发动机单独驱动模式。若驱动状态不是平稳行驶状态,则判断加速意图。若为紧急加速,此时需求扭矩很大,汽车工作在四驱模式下;若为一般加速,考虑到电池电量比较充足,采用后驱电机驱动,若后驱电机不足以提供所需求转矩,由ISG电机辅助驱动;若此时为平稳加速,后驱电机单独提供转矩驱动汽车。
2)当电池SOC处于较低的状态时,首先判断车速,若车速低于35 km/h时,由于此时电量比较低,不能为后驱电机提供能量,因此汽车工作在串联驱动模式,即后驱电机提供转矩,发动机工作在最优输出转矩曲线上带动ISG电机给电池充电。若车速高于35 km/h时,判断是否为平稳行驶状态。若为平稳行驶状态,发动机单独驱动汽车行驶,若此时需求转矩小于汽车的最优输出转矩,则发动机工作在最优输出转矩曲线上,剩余转矩带动ISG电机发电。若不是平稳行驶状态,则判断加速意图。当为紧急加速与一般加速时,由于电池SOC较低,电机不能工作,因此发动机单独驱动汽车行驶;若为平稳加速,且此时的需求转矩小于发动机的最优输出转矩时,发动机工作在最优输出转矩曲线上,剩余转矩带动ISG电机发电。整车的控制策略如图3所示:

图3 整车控制策略流程图
4.2 转矩分配策略
在确定了整车的工作模式之后,需要把整车的需求转矩实时、合理的分配给发动机与电机[14]。本文转矩分配控制策略主要是保证在有发动机参与时,使发动机工作在最优转矩曲线上。
各工作模式的转矩分配如下:
1)纯电动模式

2)发动机单独驱动模式(ISG电机辅助驱动)

3)发动机驱动,ISG电机发电模式

4)串联驱动

5)四驱模式

式中: Te为车辆需求转矩;Teopt为当前车速下发动机最优转矩;ior为后主减速比;ig为CVT速比;io为前主减速比。
5 实例车型仿真分析
5.1 实例车型技术参数和仿真模型
实例插电式四驱混合动力汽车,根据其运行状况和基本的设计要求,确定主要技术参数指标,如表2所示:
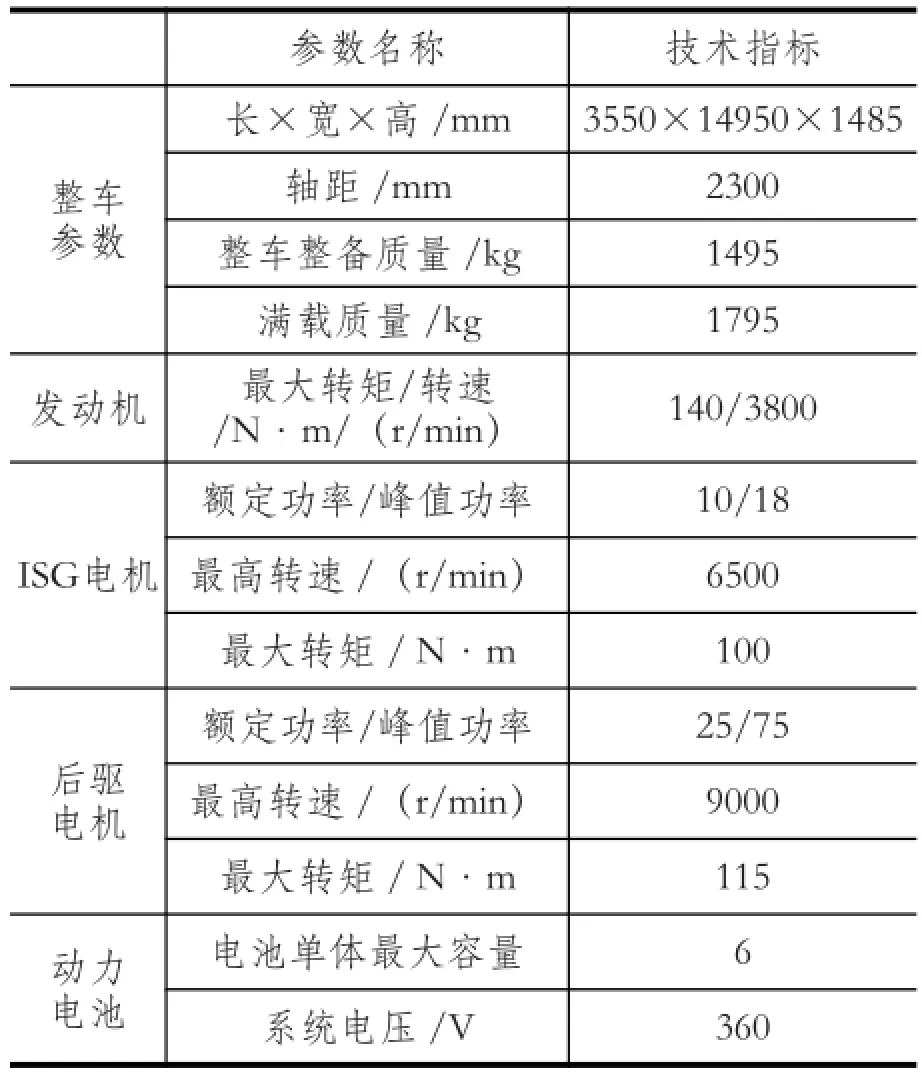
表2 实例插电四驱混合动力汽车主要技术参数

图4 四驱混合动力汽车前向仿真模型
根据实例插电四驱混合动力汽车主要参数,基于MATLAB/SIMULINK/STATEFLOW平台建立了前向仿真模型[15]。整车前向仿真模型如图4所示。
5.2 仿真结果分析
在MATLAB/SIMULINK平台中,使用搭建的四驱混合动力汽车前向仿真模型(见图4),在NEDC工况(见图5)下进行仿真分析。根据本文制定的控制策略,分别在高电量和低电量的情况下进行仿真分析,仿真结果如图7-9所示:
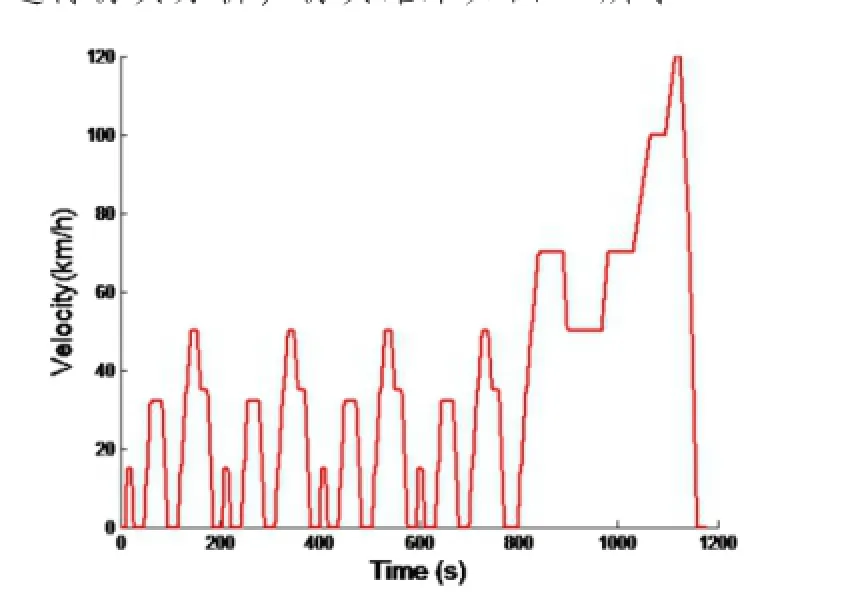
图5 NEDC循环工况

图6 驾驶意图识别结果
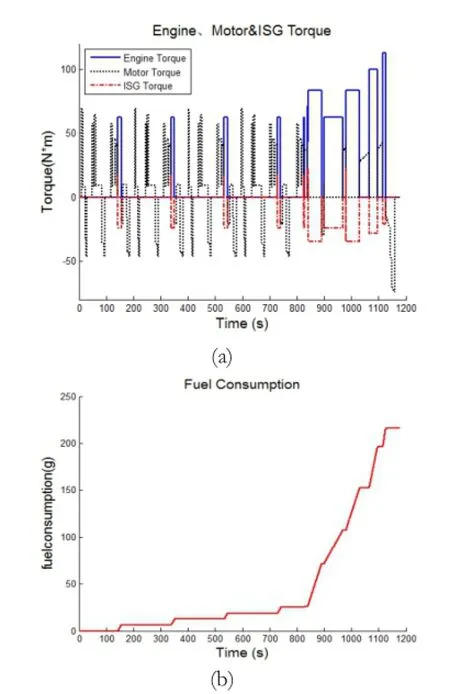
图7 高电量状态下仿真结果

图8 低电量状态下仿真结果
图6(a)为在NEDC工况下加速意图识别结果,图6(a)中1代表平稳加速,2代表一般加速,3代表紧急加速;图6(b)为在NEDC工况下平稳驾驶识别结果,图6(b)中0代表正常行驶,1代表高速平稳行驶,2代表低速平稳行驶。从图6(a)、图6(b)可以看出:本文所设计的驾驶意图识别模块可以准确识别在NEDC工况下的驾驶员的驾驶意图。
图7和图8分别为在高电量和低电量状态下转矩分配和燃油消耗的仿真结果。从图7(a)可以看出,在高电量情况下,后驱电机作为主要的动力源提供转矩。由于所识别的加速意图大部分都为平缓加速和一般加速,基本没有紧急加速情况,因此发动机只工作在高速平稳行驶的工况下。并且发动机工作在最优转矩曲线上,发动机多余的动力会带动ISG电机给电池充电,大大提高了能量的利用率。从图8(a)可以看出在车速比较低的情况下,整车工作在串联驱动模式下,后驱电机提供需求转矩,发动机带动ISG电机充电。在加速工况和平稳行驶工况下,发动机驱动汽车行驶,同时多余的转矩带动ISG电机给电池充电。
通过对比图7(b)和图8(b)可以看出,电量充足时,尽量消耗电能,因此在一个NECD循环工况下燃油消耗量仅为216.1 g,远远低于传统燃油车。但在低电量情况下,由于发动机工作频繁,在一个NECD循环工况下燃油消耗量上升至510 g,折合成百公里油耗为6.57 L,相比于传统内燃机汽车百公里油耗7.35 L,燃油经济性也有10.6%的提升。但是平时尽量避免插电式混合动力汽车长时间工作在低电量的情况下。
从图7和图8可以看出,整车能够按照控制策略所设计的工作模式运行,并且可以根据驾驶意图进行工作模式的切换,保持良好的燃油经济性。
6 结 论
设计了模糊控制驾驶意图识别模块用来识别驾驶意图,并基于驾驶意图识别结果以及SOC的状态水平设计了整车控制策略。
在MATLAB/SIMULINK/STATEFLOW平台上搭建了四驱混合动力汽车前向仿真模型,在NEDC工况下对实例插电式混合动力汽车进行仿真。仿真结果表明:驾驶意图识别结果较为准确,并在不同SOC状态水平下根据不同驾驶意图切换至相应工作模式,而且动力源在不同工作模式下输出有效合理的转矩,整车的燃油经济性较好。
参考文献:
[1]王帅峰.插电式电动汽车的控制策略研究与仿真分析[D]. 吉林:吉林大学, 2011. 9-10.
[2]吴迪. ISG混合动力汽车能量优化管理策略[D]. 合肥:合肥工业大学, 2013:10-11.
[3]尹安东.基于混合系统理论的混合动力客车控制策略研究[D]. 合肥: 合肥工业大学, 2010: 75-102.
[4]邱利宏, 钱立军, 程伟. 插电式四驱混合动力轿车控制策略研究[J]. 汽车工程学报, 2015, 5(1): 66-73.
[5]李礼夫,曹明轩.混联式混合动力电动汽车动力系统能量控制策略瞬时优化方法[J]. 机械与电子, 2013, 1(5):35-39.
[6]杨官龙,秦大同,刘永刚,林毓培. CVT插电式混合动力汽车全局优化控制策略[J]. 中南大学学报(自然科学版), 2014, 45(12): 4194-4200.
[7]王俊华, 伊海霞, 魏丹, 夏珩. 电动四驱混合动力汽车工作模式分析及关键参数设计[J]. 新能源技术, 2015, 1(3): 56-62.
[8]王庆年, 唐先智, 王鹏宇, 田丽媛, 孙磊基于神经网络的混合动力汽车驾驶意图识别方法[J]. 农业机械学报, 2012, 43(8): 32-36.
[9]王庆年, 王俊, 陈慧勇, 曾小华, 唐先智. 混合动力车辆中的加速与制动意图识别[J]. 吉林大学学报(工学版), 2014, 44(2): 281-286.
[10]杨官龙.基于驾驶意图与工况识别的插电式混合动力汽车能量管理策略研究[D]. 重庆:重庆大学, 2014. 85-86.
[11]王刚毅.插电式混联四驱混合动力轿车动力系统匹配设计及仿真[D]. 西安:长安大学, 2014. 1-2.
[12]钱立军, 邱利宏, 辛付龙, 胡伟龙. 插电式四驱混合动力汽车能量管理与转矩协调控制策略[J]. 农业工程学报, 2014, 30(19): 55-64.
[13]马东兵.h四轮驱动混合动力汽车控制策略仿真与测试[D]. 上海:上海交通大学, 2013. 19-28.
[14]尹安东, 宫闪闪, 江昊, 赵韩. 动态转矩协调的ISG混合动力系统控制策略[J]. 电子测量与仪器学报, 2013, 27(2): 145-150.
[15]张文超, 周兵, 吕绪宁. 四驱性混合动力前向仿真模型开发[J]. 机械科学与技术, 2014, 33(6): 913-917.
★项目资助:国家新能源汽车产业技术创新工程整车项目 ( 财建[2012]1095号)
中图分类号:U469.72
文献标识码:A
文章编号:1005-2550(2016)02-0007-07
doi:10.3969/j.issn.1005-2550.2016.02.001
收稿日期:2015-09-17
Research on control strategy for plug-in hybrid electric vehicle based on driving intention identification
YIN An-dong1, 2, GUO Xing1
( 1. School of Mechanical and Vehicle Engineering, Hefei University of Technology, Hefei 230009, 2. Nation and Local Union Research Center for Automotive Technology & Equipment Engineering, Hefei, 230009 )
Abstract:With the plug-in 4WD hybrid electric vehicle as the research object, a driving intention identification module was designed using fuzzy control theory and a vehicle control strategy was designed based on the driving intention. Vehicle simulation model was established by Matlab/Simulink stateflow, and the simulation was carried on plug-in 4WD hybrid electric vehicle in the condition of NEDC driving cycles based on the instance vehicle. The simulation results show that the fuzzy control strategy can identify driving intention effectively, drive mode can be switched according to the control strategy and torque distribution is reasonable. The results verify the effectiveness of control strategy and provide a new idea for the research of the 4WD PHEV.
Key Words:plug-in hybrid electric vehicle; driving intention identification; fuzzy control; control strategy
