磁悬浮高速电动机转子-轴承系统耦合振动特性研究
2016-07-25肖林京吕楠丁鸿昌刘鲁伟
肖林京,吕楠,丁鸿昌,刘鲁伟
(山东科技大学 机械电子工程学院,山东 青岛 266590)
转子-轴承系统是磁悬浮高速电动机中的关键部分,当柔性转子的额定转速高于其临界转速时,转子在启停时必须穿越临界转速。转子穿越临界转速时,由于质量不平衡会产生振动,较大的振幅会导致轴承和转子结构的损伤,甚至影响机械结构的正常运转。在工程实际中,通过调节临界转速附近加速度来减小临界转速附近的振幅,主要分析方法有解析法、传递矩阵法、有限元法、不平衡响应法及模态合成法等[1-2]。现利用有限元法,考虑陀螺效应,模拟转子的振动情况,基于转子动力学,通过ANSYS Workbench软件对转子系统进行有限元仿真,分析转子的振动特性,借助MATLAB数值模拟,对磁悬浮高速电动机转子-轴承系统的临界转速和支承载荷耦合振动问题进行探讨。
1 磁悬浮高速电动机转子系统结构
对转子振动特性的分析基于20 000 r/min,4 kW磁悬浮高速电动机,其转子系统结构简图如图1所示。其中电动机转子为组合式转子,由2个径向磁轴承和2个轴向磁轴承支承,为保障电动机的主动控制环节,在转子的两侧装有轴向传感器组件,为减小动平衡后装配导致的误差,安装时选用保护轴承组件[3]。

1—组合转子;2—1#径向磁轴承组件;3—电动机组件;4—2#径向磁轴承组件;5—径向传感器组件;6—轴向磁轴承组件;7—轴向传感器组件;8—保护轴承结构
2 转子-轴承系统理论模型
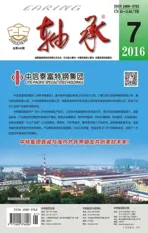
将转子-轴承系统离散化为一个多自由度系统,其数学模型可简化为一个线性5自由度、集中质量的转子,其力学模型如图2所示。理想化转子模型为一根轴和一个集中质量的圆盘,支承轴承简化为刚度阻尼的支承,即质量-弹簧-阻尼器模型(图2a)。以转轴未变形前的中心为原点O,建立坐标系Oxy,转轴变形后的中心为O′;以圆盘的质量偏心为圆心Oe,建立Oex′y′坐标系,其中圆盘集中质量为md,偏心质量为me,偏心距为e,偏位角为θ,支承刚度和阻尼分别为K,C。
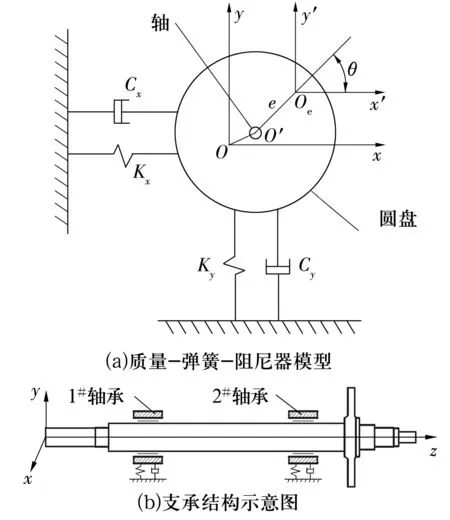
图2 转子系统模型
考虑其陀螺效应和旋转阻尼时,转子动力学运动方程为

(1)

由于偏心质量me的存在,转子的横向(x轴)振动会在穿越临界转速时激增。模型中的离心力和扭转力分别为
Fc=meeθ·2,
(2)
Ft=meeθ·2。
(3)
在分析转子临界转速振动特性时,假设初始运动状态下θ=0,时间t=0。考虑转子在x,y方向的离心力和扭转力,可得
。(4)
磁轴承的磁力支承载荷为
(5)
式中:X0,Y0分别为节点处x,y方向静态线位移矩阵,X0=[x01,x02,…,x0n],Y0=[y01,y02,…,y0n]。
转子-轴承系统的耦合振动模型为
,(6)
式中:Ω为轴颈转速;xf,yf分别为参振质量的振动位移。
3 仿真分析
由于轴承-转子系统结构复杂,因此对轴承-转子系统进行简化分析。在ANSYS Workbench中建立转子模型,如图3所示。圆盘转轴材料为40Cr,系统参数见表1。
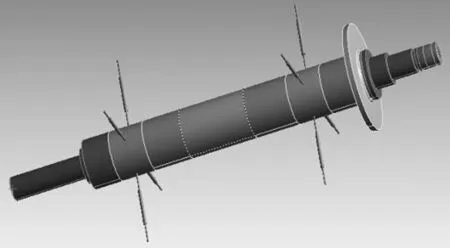
图3 转子模型图
当x,y方向的支承刚度及等效质量相差不大,且耦合较弱时,计算临界转速时可认为支承为各向同性的,即可通过分析转子在某一固定面内的振动来计算其临界转速。对转子进行模态分析,得到转子系统的前5阶临界转速分别为3 187,4 128,4 920,16 280, 45 840 r/min,前5阶振型如图4所示。第1阶临界转速附近,转子组件左右平动;第2阶临界转速附近,推力盘端前后振动,转速增加,推力盘上下振动;第3阶临界转速附近,轴伸端前后振动,转速增加,轴伸端上下振动;第4阶临界转速附近,转子组件发生弯曲振动,为第1阶弯曲临界转速;第5阶临界转速附近,转子组件发生强烈的弯曲振动,为第2阶弯曲临界转速。
第1阶弯曲临界转速附近轴承支承点激振曲线如图5所示。由图可知,临界转速附近,支承点产生一个激振,将给机械的正常运转留下安全隐患,因此,机械正常工作转速应避开临界转速,但在启停时要穿越临界转速,转子系统减振的关键即为对临界转速附近振幅的控制,从而平稳穿越临界转速。
图4 前5阶振型图

图5 第1阶弯曲临界转速附近支承点激振曲线
实际运转中,轴承的位置会随安装配合、工作状态或外界环境变化等因素发生不同改变,包括水平偏移、抬高以及轴承偏转。通过改变轴承偏移、抬高位置来仿真轴承实际运转中的位置改变,以临界转速附近的振幅变化为衡量指标,在MATLAB中利用Runge-Kutta法对系统振动方程进行仿真分析。根据文献[4]的研究结果,将轴承位置分别在水平方向向右(x轴正向)偏移0.01 mm,垂直方向向上(y轴正向)抬高0.01 mm,振动仿真结果如图6所示。

图6 振动仿真图
由于轴承位置改变会导致轴承载荷发生变化,即相当于对转子系统施加了一个激振力,由图6可知,转子和支承均产生了振动响应,轴承抬高对转子系统振动的影响比轴承偏移的大,且抬高导致的振幅变化范围明显大于偏移导致的振幅变化范围。此外,不同支承点的轴承位置改变对振幅变化范围的影响也不同。2#轴承(近推力盘端)抬高对临界转速附近振幅变化范围的影响比1#轴承(远离推力盘端)的大;轴承偏移对振幅变化范围的影响则相对较小。转子振动按单一振动频率逐渐衰减,不同支承点的振幅不同,衰减速度也不同。
4 结论
建立了轴承-转子系统的振动耦合方程,并在ANSYS Workbench中进行转子动力学建模分析,获得转子系统的前5阶临界转速及各阶振型,进一步研究了轴承载荷与振动耦合特性,分析了轴承径向位置对支承轴承载荷的影响,得到如下结论:
1)转子系统正常运作时,在其临界转速附近会产生一个较大的激振,且伴随较大的振动幅值,设计时应避免转子工作转速接近临界转速,以降低机械工作的安全隐患。
2)转子系统中轴承支承位置改变,临界转速附近的振幅也发生变化,垂直方向支承位置的变化对振幅的影响比水平方向的大。对于不同方向支承轴承的阻尼控制应制定不同的控制策略,以保障转子的平稳运转。
3)转子系统中不同支承点的轴承位置的改变对转子临界转速附近振幅的影响不同,对振幅变化的影响不规律。